Concept
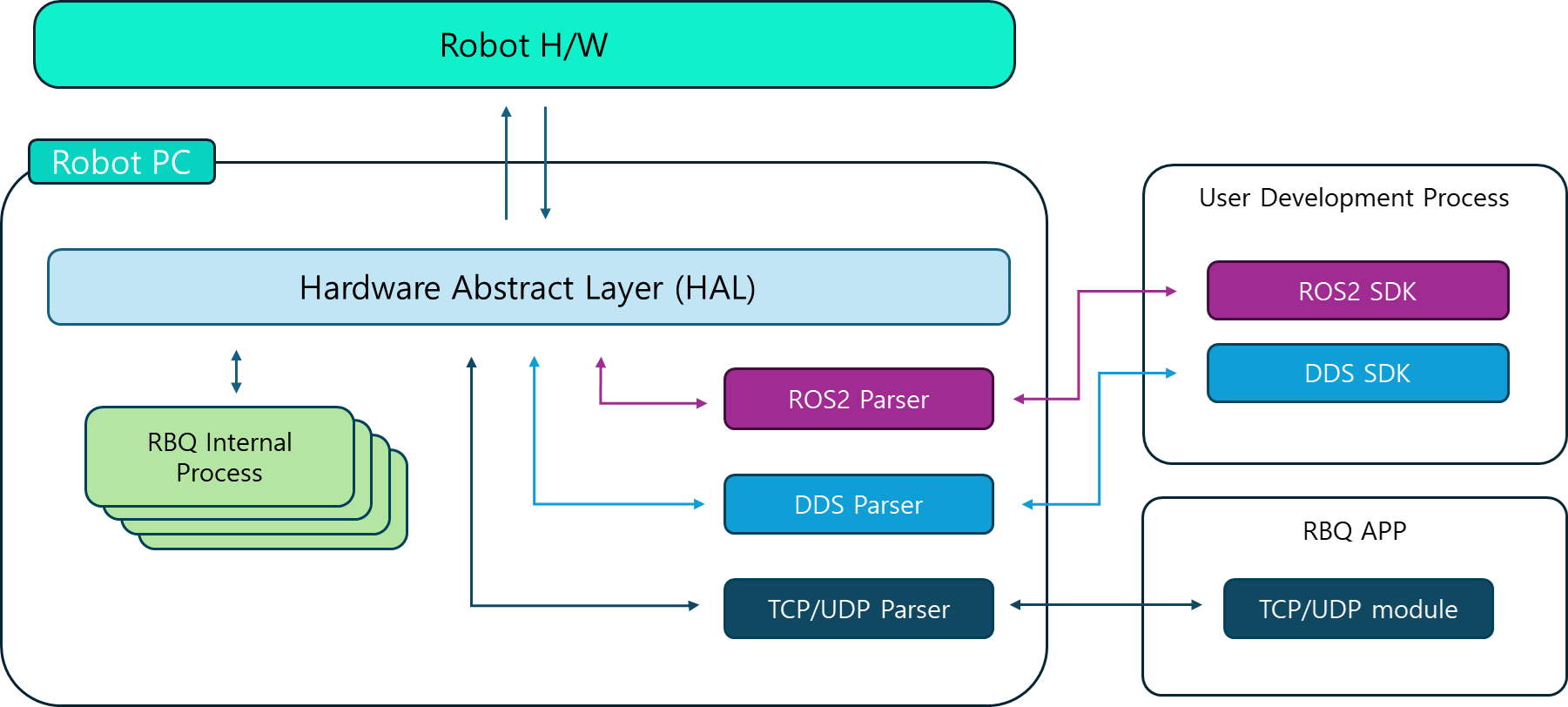
System Diagram
SDK Overview
The RBQ SDK is built to provide developers with a flexible and scalable interface for working with the RBQ quadruped robot.
It supports both low-level control and high-level commands, so whether you're building your own controller or integrating the robot into an existing system, there's a suitable entry point.
Low-Level Access
The LV0 SDK offers direct access to the robot’s sensors and actuators.
It is intended for developers who need precise control and real-time feedback from the hardware.
Key Features:
- Read raw sensor data: IMU, joint encoders, etc.
- Send joint-level commands: position, velocity, torque
- Ideal for:
- Custom controller development
- Low-latency real-time experiments
- Research in locomotion control
High-Level Command Interface
The LV1 SDK provides a simplified interface to control the robot using predefined actions and commands, without needing to manage low-level details.
Key Features:
- Execute common motions and gait behaviors with a single command
- Seamless integration with the RBQ APP command set
- APIs available in:
- C/C++
- Python
- ROS2
- Ideal for:
- Application developers
- System integration
- Rapid prototyping with minimal setup
Supported Communication Interfaces
The SDK supports multiple communication protocols depending on your use case:
| Interface | Description |
|---|---|
| ROS2 SDK | For robotics developers in the ROS2 ecosystem |
| DDS SDK | For real-time, distributed communication using DDS |
| TCP / UDP | Lightweight direct packet communication for custom tools |