Software Stack
개요 (Overview)
이 소프트웨어 아키텍처는 로봇의 기능을 최대한 활용할 수 있도록 하며, 다양한 요구를 충족시키고 확장 가능한 소프트웨어 구조를 통해 쉽고 빠르게 애플리케이션을 개발할 수 있게 합니다.
이 소프트웨어 구조는 다음과 같이 구성됩니다:
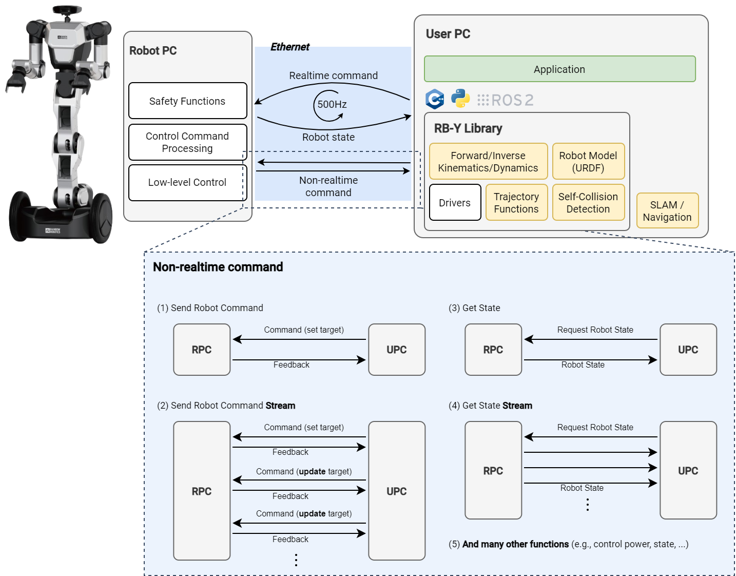
독립적인 로봇 내부 제어기(Robot PC)는 안정적인 성능 및 안전성을 보장하며, 애플리케이션 제어 PC(User PC)와의 이중화를 통해 확장성을 제공합니다.
Non-realtime communication channels은 실시간 제어가 필요하지 않은 고급 명령(movej, movel 등)과 로봇 설정을 위해 사용됩니다.
Realtime command channels은 실시간 응답이 필요한 저수준 명령을 위해 사용됩니다.
Robot model library는 시뮬레이션 환경을 구축할 수 있게 하며, 로봇의 운동학 및 동역학 파라미터에 접근할 수 있습니다.
고급 제어를 구현하기 위한 다양한 라이브러리(예: 모션/태스크 플래너)가 포함되어 있습니다.
시뮬레이션 (Simulation)
시뮬레이션 환경 구축을 위한 모델(URDF/MJCF)을 제공합니다.