Software Stack
Overview
The software architecture ensures stable performance and safety while providing scalability for the robot. It covers various needs and enables easy and fast application development with scalable software structures.
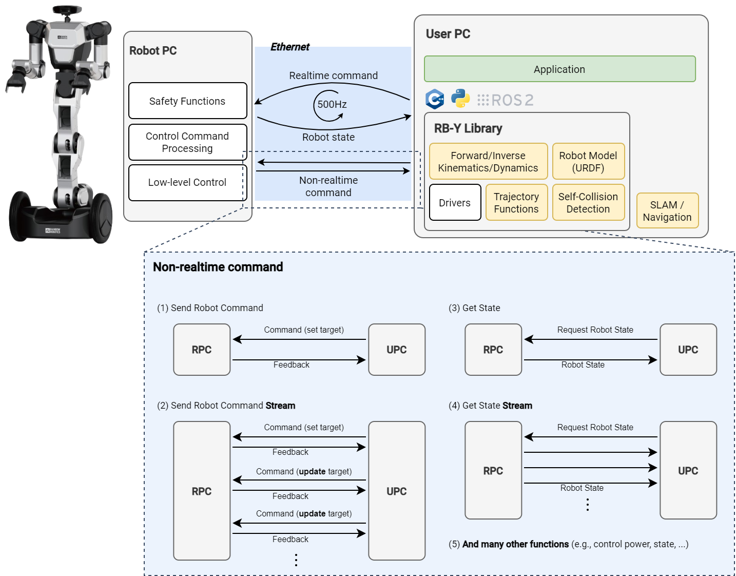
This software structure is composed as follows:
- Independent robot internal controllers (Robot PC): Ensures stable performance and safety. Dualized with an application control PC (User PC) for scalability.
- Non-realtime communication channels: Used for high-level commands and robot settings such as power control. Commands can be built using a builder pattern and sent to the robot for execution. Non-realtime communication uses gRPC and can support up to 100Hz.
- Realtime command channels: Dedicated for low-level commands that require real-time response. Realtime control is based on UDP and can support up to 500Hz using a custom controller.
- A robot model library: Allows for the building of simulation environments and provides access to the robot's kinematic and dynamic parameters.
- Various libraries for implementing higher-level control (e.g., motion/task planner).
Simulation
🚧 Simulation models (URDF/MJCF) will be provided soon.