Controllers
Overview
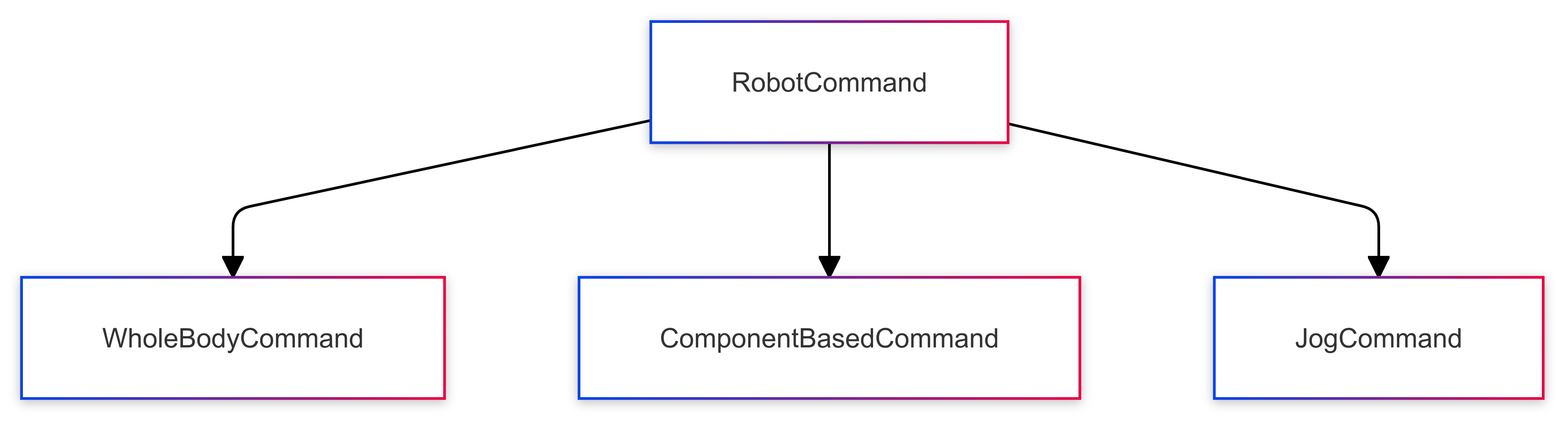
The robot commands are divided into three main types:
- WholeBodyCommand: Controls the entire robot with 24 degrees of freedom (DOF) in a single command.
- ComponentBasedCommand: Sends commands to the robot's
head,body, ormobilitycomponents individually. - JogCommand: Controls smaller, individual movements, typically used for fine adjustments.
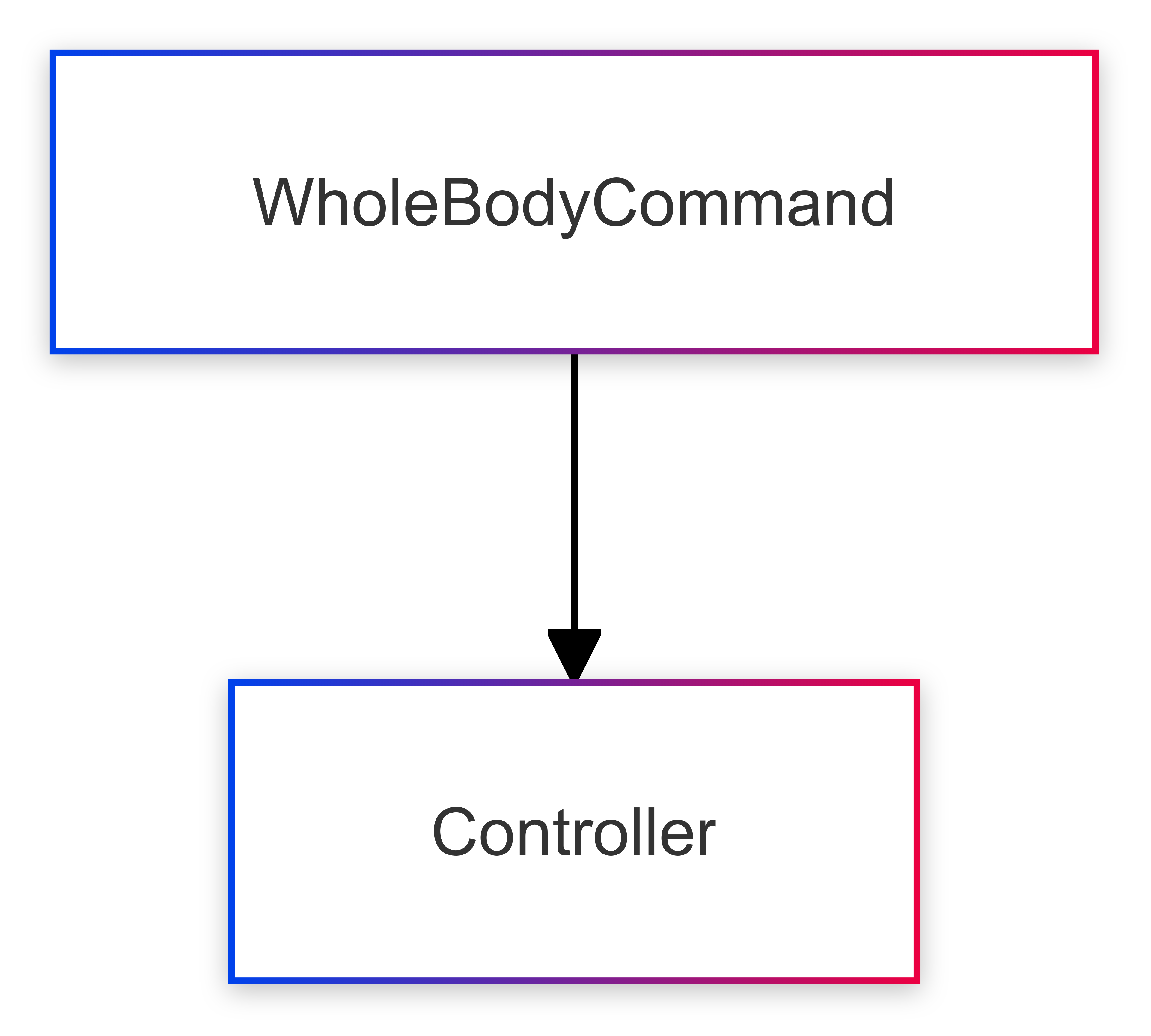
WholeBodyCommand
This command controls all the major components of the robot, including arms, torso, and legs. It supports various controllers for managing the full body of the robot. The primary use case is for synchronized movements where multiple parts of the robot are involved. This command sends a 24 DOF control signal all at once.
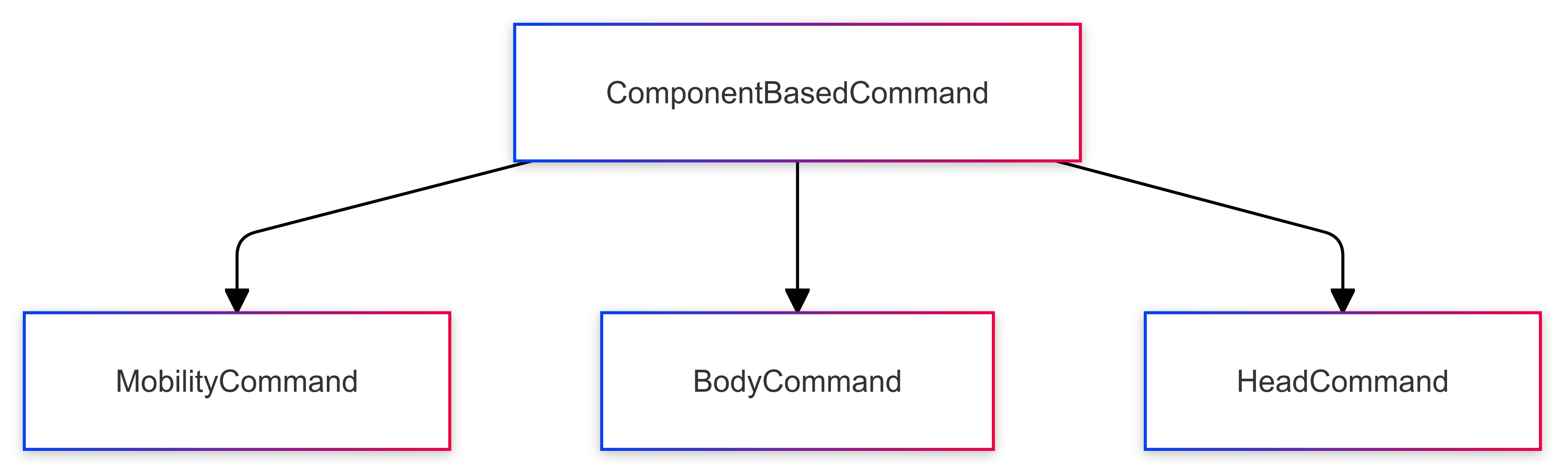
ComponentBasedCommand
The ComponentBasedCommand is responsible for controlling the core components of the robot, such as the Mobility, Body, and Head. It provides a flexible architecture for handling different sections of the robot individually. Each of these components can be controlled using specialized commands, allowing precise control over the robot's movement and actions. This structure typically supports multiple controllers to handle specific parts of the robot efficiently.
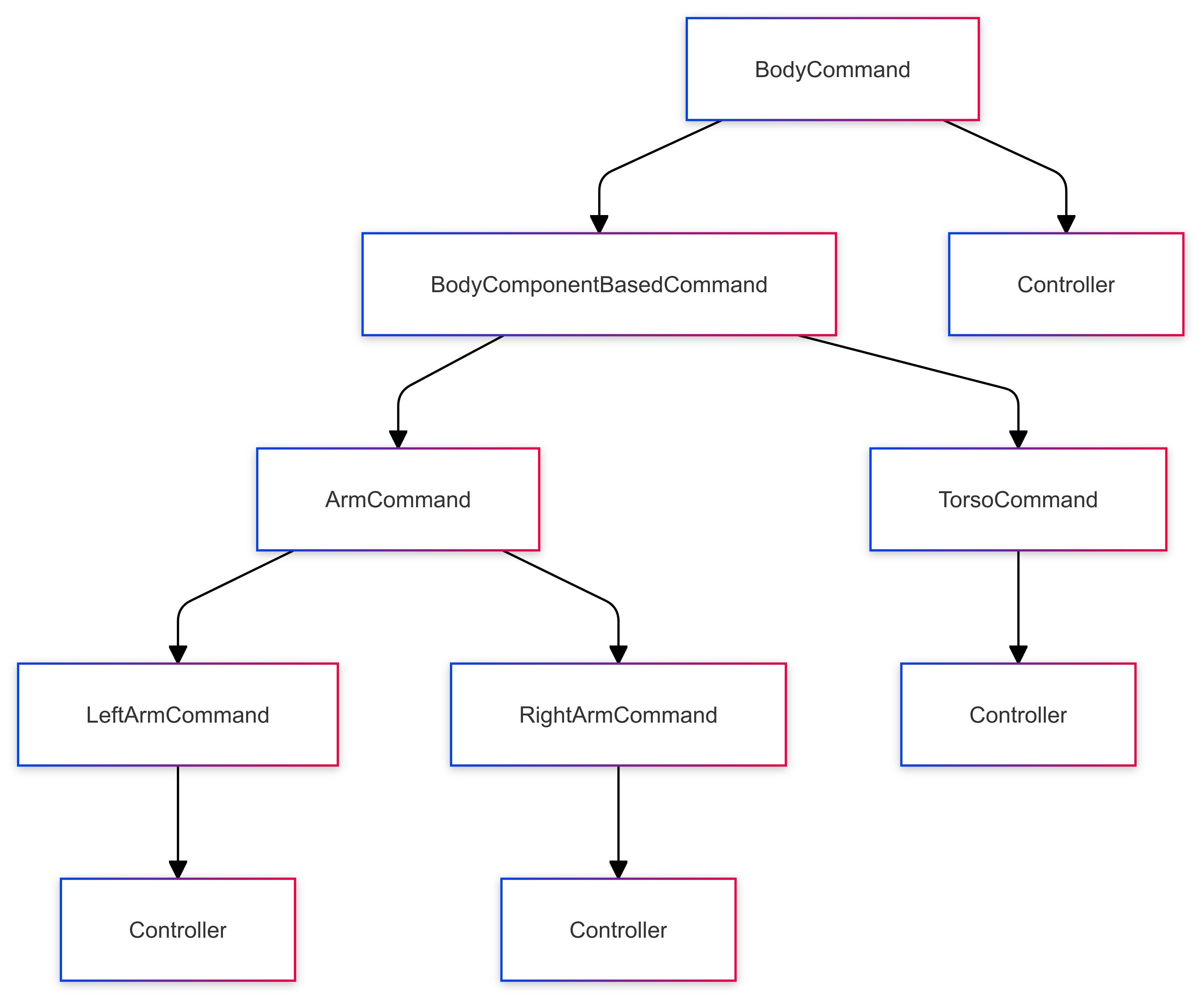
BodyCommand Structure
The BodyCommand allows for detailed control of the robot's body and arms. It is divided into BodyComponentBasedCommand, under which TorsoCommand and ArmCommand exist. The arms can be controlled individually through LeftArmCommand and RightArmCommand, providing finer control over each arm.
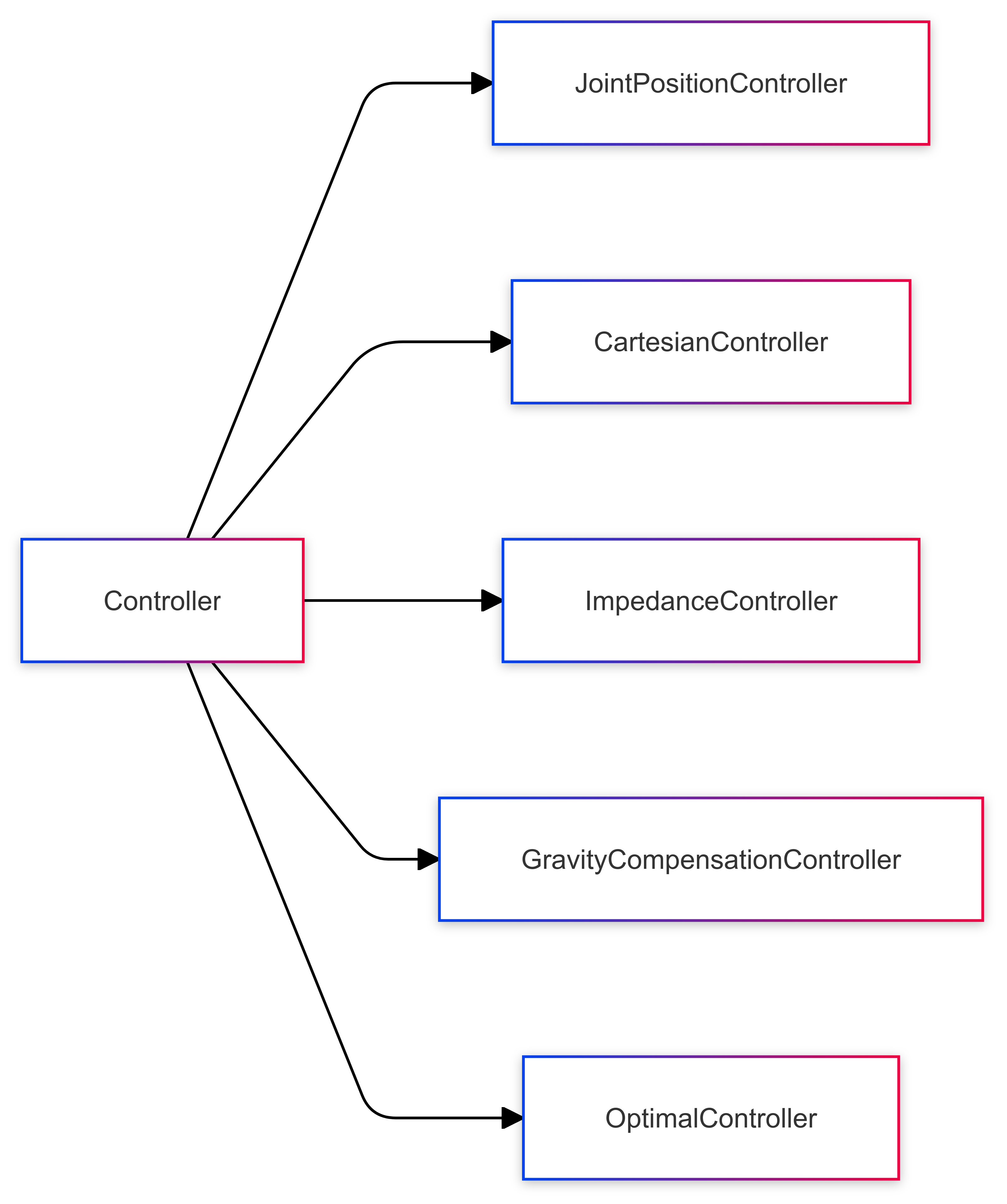
In the diagram below, the Controller nodes follow the structure defined in the Controllers section, where each Controller node represents the available controllers for joint position, Cartesian motion, impedance control, gravity compensation, and optimal control.
Controllers
The following controllers are used throughout different commands like WholeBodyCommand, ComponentBasedCommand, and their subcommands.
- JointPositionController: Manages the position of each joint.
- CartesianController: Controls the Cartesian position of the robot.
- ImpedanceController: Allows control of force and motion, useful for interactions with the environment.
- GravityCompensationController: Compensates for gravitational forces, making the robot more energy-efficient during holding positions.
- OptimalController: Controls the robot's motion using an optimization equation.
Examples
def example_joint_position_command_1(robot):
print("joint position command example 1")
# Initialize joint positions
q_joint_waist = np.zeros(6)
q_joint_right_arm = np.zeros(7)
q_joint_left_arm = np.zeros(7)
# Set specific joint positions
q_joint_right_arm[1] = -90 * D2R
q_joint_left_arm[1] = 90 * D2R
rc = RobotCommandBuilder().set_command(
ComponentBasedCommandBuilder().set_body_command(
BodyComponentBasedCommandBuilder()
.set_torso_command(
JointPositionCommandBuilder()
.set_minimum_time(minimum_time)
.set_position(q_joint_waist)
)
.set_right_arm_command(
JointPositionCommandBuilder()
.set_minimum_time(minimum_time)
.set_position(q_joint_right_arm)
)
.set_left_arm_command(
JointPositionCommandBuilder()
.set_minimum_time(minimum_time)
.set_position(q_joint_left_arm)
)
)
)
rv = robot.send_command(rc, 10).get()
if rv.finish_code != RobotCommandFeedback.FinishCode.Ok:
print("Error: Failed to conduct demo motion.")
return 1
return 0
def example_joint_position_command_2(robot):
print("joint position command example 2")
# Define joint positions
q_joint_waist = np.array([0, 30, -60, 30, 0, 0]) * D2R
q_joint_right_arm = np.array([-45, -30, 0, -90, 0, 45, 0]) * D2R
q_joint_left_arm = np.array([-45, 30, 0, -90, 0, 45, 0]) * D2R
# Combine joint positions
q = np.concatenate([q_joint_waist, q_joint_right_arm, q_joint_left_arm])
# Build command
rc = RobotCommandBuilder().set_command(
ComponentBasedCommandBuilder().set_body_command(
BodyCommandBuilder().set_command(
JointPositionCommandBuilder()
.set_position(q)
.set_minimum_time(minimum_time)
)
)
)
rv = robot.send_command(rc, 10).get()
if rv.finish_code != RobotCommandFeedback.FinishCode.Ok:
print("Error: Failed to conduct demo motion.")
return 1
return 0