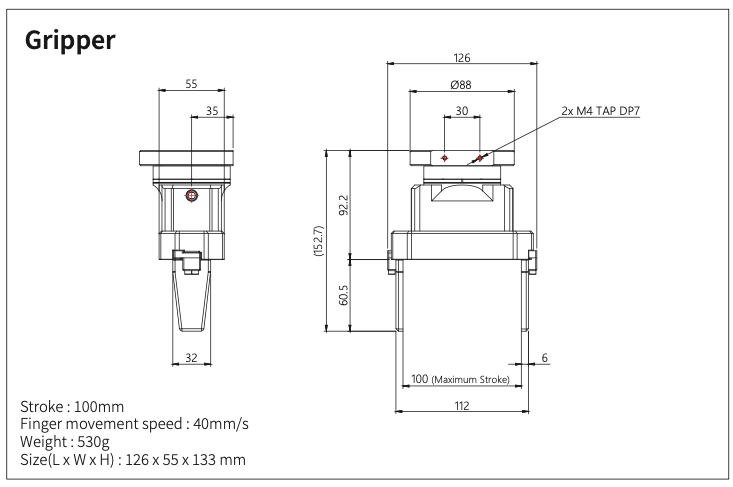
Gripper
These are the specifications for the standard gripper, which is sold as an option. The gripper uses the Dynamixel XM430-W210 actuator.
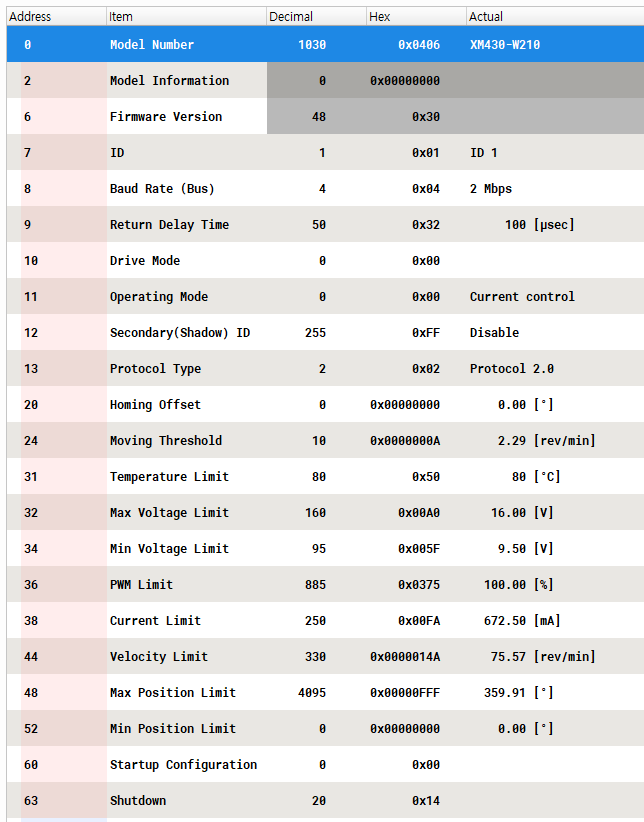
The default settings for the Dynamixel are shown in the image below. If these settings are maintained, the examples/cpp/module_test/gripper.cpp code can be used without modification. (The gripper on the right hand is set to ID 0, and the gripper on the left hand is set to ID 1.)
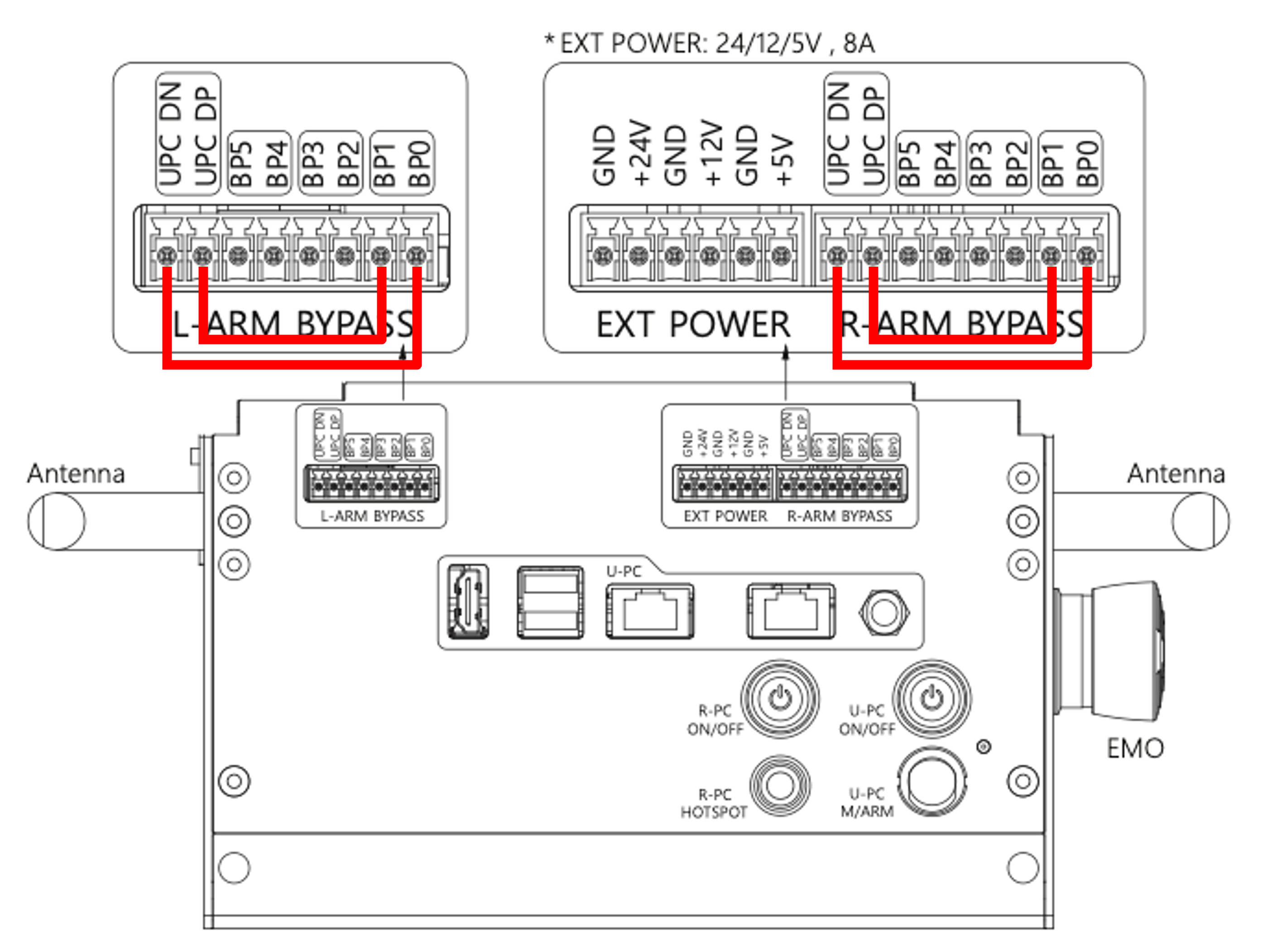
The gripper is connected to the body’s IO port via the bypass port mounted on the wrist. As shown in the image below, the cable can be connected in a way that allows the use of the RS485 to USB device (U2D2) installed in the PDU. (UPC DP <-> BP0 / UPC DN <-> BP1)