개념
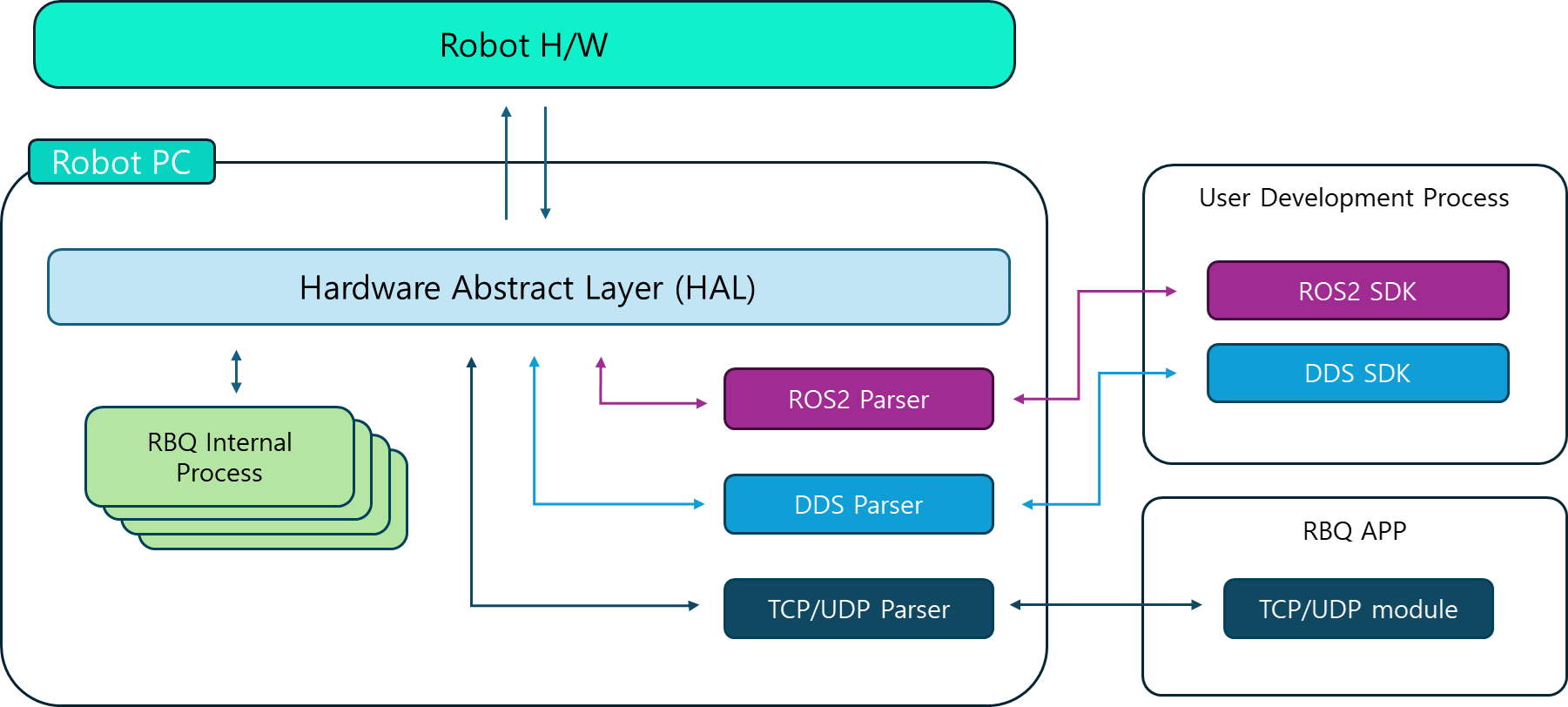
시스템 다이어그램
SDK 개요
RBQ SDK는 개발자에게 RBQ 사족보행 로봇을 위한 유연하고 확장 가능한 인터페이스를 제공하기 위해 설계되었습니다.
Low Level 제어와 High Level 명령을 모두 지원하므로, 자체 컨트롤러를 개발하거나 로봇을 기존 시스템에 통합하는 경우 모두 적합한 진입점이 있습니다.
Low Level 접근
LV0 SDK는 로봇의 센서와 액추에이터에 직접 접근할 수 있습니다.
정밀한 제어와 하드웨어로부터의 실시간 피드백이 필요한 개발자를 위해 설계되었습니다.
주요 기능:
- 센서 데이터 읽기: IMU, 조인트 인코더 등
- 조인트 레벨 명령 전송: 위치, 속도, 토크
- 적합한 용도:
- 커스텀 컨트롤러 개발
- 저지연 실시간 실험
- 보행 제어 연구
High Level 명령 인터페이스
LV1 SDK는 Low Level 세부 사항을 관리할 필요 없이 사전 정의된 동작과 명령을 사용하여 로봇을 제어할 수 있는 간소화된 인터페이스를 제공합니다.
주요 기능:
- 단일 명령으로 일반적인 모션 및 보행 동작 실행
- RBQ APP 명령 세트와 원활한 통합
- 사용 가능한 API:
- C/C++
- Python
- ROS2
- 적합한 용도:
- 애플리케이션 개발자
- 시스템 통합
- 최소한의 설정으로 빠른 프로토타이핑
지원되는 통신 인터페이스
SDK는 사용 사례에 따라 여러 통신 프로토콜을 지원합니다:
| 인터페이스 | 설명 |
|---|---|
| ROS2 SDK | ROS2 생태계의 로보틱스 개발자용 |
| DDS SDK | DDS를 사용한 실시간 분산 통신용 |
| TCP / UDP | 커스텀 도구를 위한 경량 직접 패킷 통신 |