3. Payload Setting
Goal: Enter the add-on's mass and X/Y/Z offset in RBQGUI so the robot accounts for it during walking.
Prerequisites: Step 2 Rail & Spring Nut is complete — the add-on is physically mounted on the rail.
Before You Start
- Place the robot on a flat, safe surface.
- RBQGUI is connected to the robot (Controller & Wi-Fi complete).
- You have measured the add-on's center-of-mass offset (X / Y / Z, in meters) from the robot body center.
Procedure
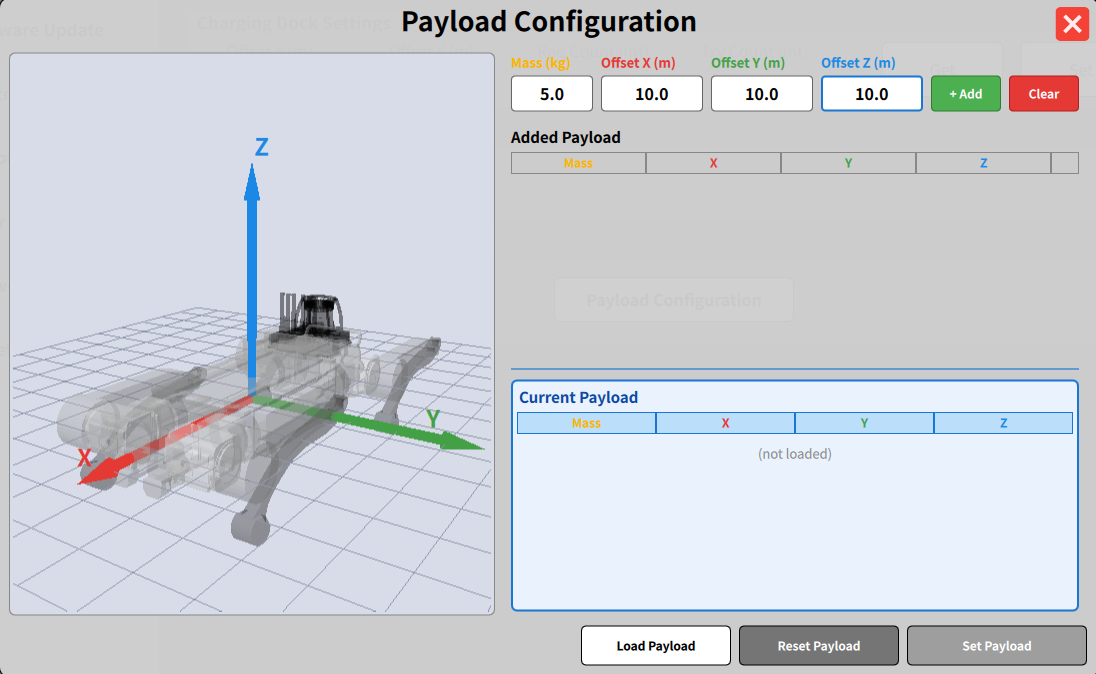
- Open Payload Configuration in RBQGUI.
- Enter the values in the top input fields:
- Mass (kg) — payload mass
- Offset X / Y / Z (m) — payload center position in the robot frame
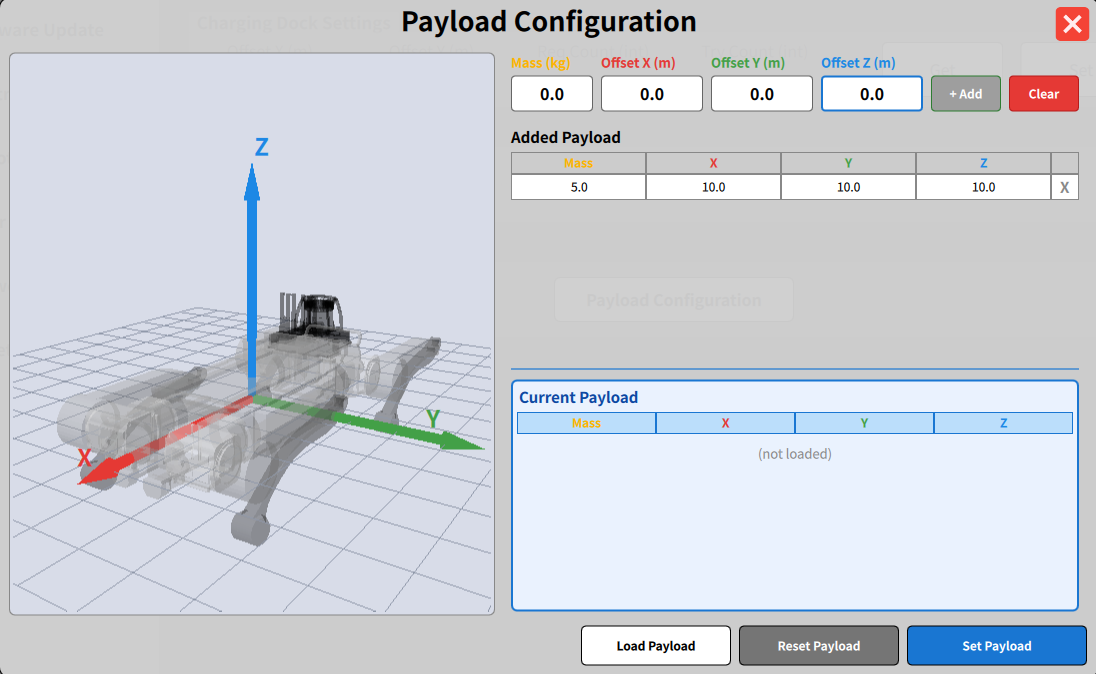
- Click + Add to add the values to the Added Payload list.
- Confirm the values are correct, then click Set Payload.
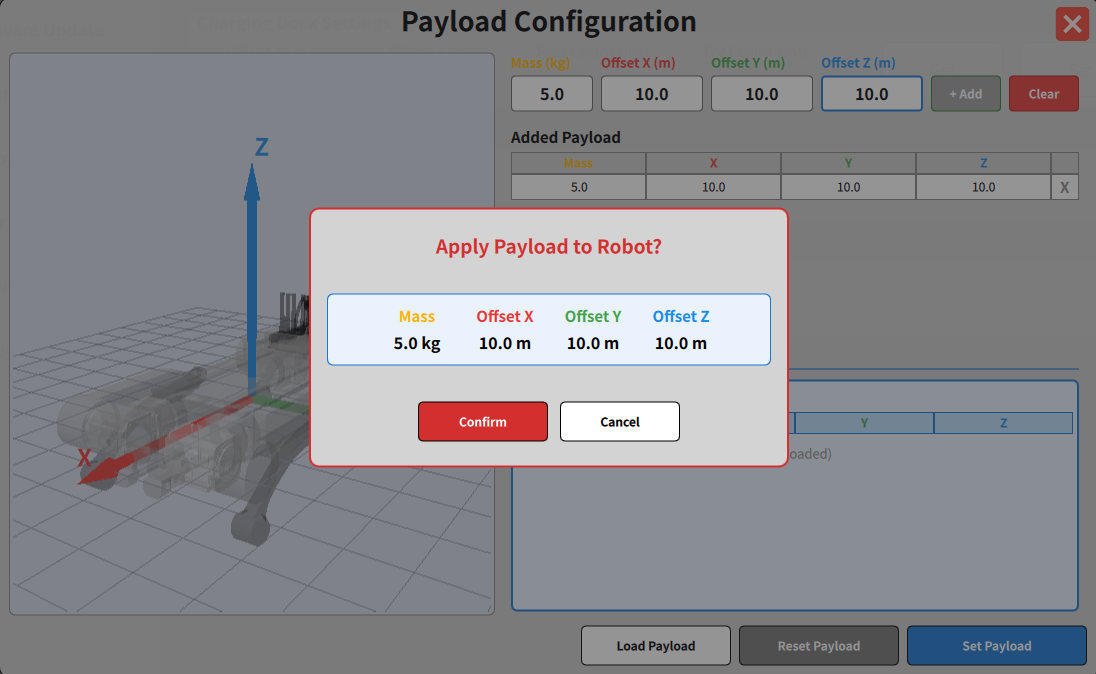
- When the confirmation popup appears, verify the mass/offset and click Confirm to apply.
- Optionally, click Load Payload to read back the value currently applied on the robot and verify it matches.
Button Reference
| Button | Function |
|---|---|
| + Add | Add entered mass/offset to the candidate list |
| Clear | Clear current input fields |
| Set Payload | Apply the Added Payload list to the robot |
| Load Payload | Read back the payload value currently applied on the robot |
| Reset Payload | Reset payload to default (no payload) |
NOTE
Updating payload alone is not enough — the next step (ZMP calibration) re-centers the robot's standing posture so it actually balances under the new load.
Next Step
After registering the payload, run ZMP calibration to balance under the new weight: