3. Payload 설정
목표: RBQGUI에서 추가 모듈의 질량과 X/Y/Z 오프셋을 입력하여, 로봇이 보행 중 이를 반영하도록 설정합니다.
사전 조건: 2단계 레일 & 스프링 너트 완료 — 추가 모듈이 레일에 물리적으로 장착되어 있어야 합니다.
시작하기 전에
- 로봇을 평탄하고 안전한 바닥에 놓으세요.
- RBQGUI가 로봇에 연결되어 있어야 합니다 (컨트롤러 & Wi-Fi 완료).
- 추가 모듈 무게중심의 **X / Y / Z 오프셋(m)**을 로봇 본체 중심 기준으로 측정해 두세요.
절차
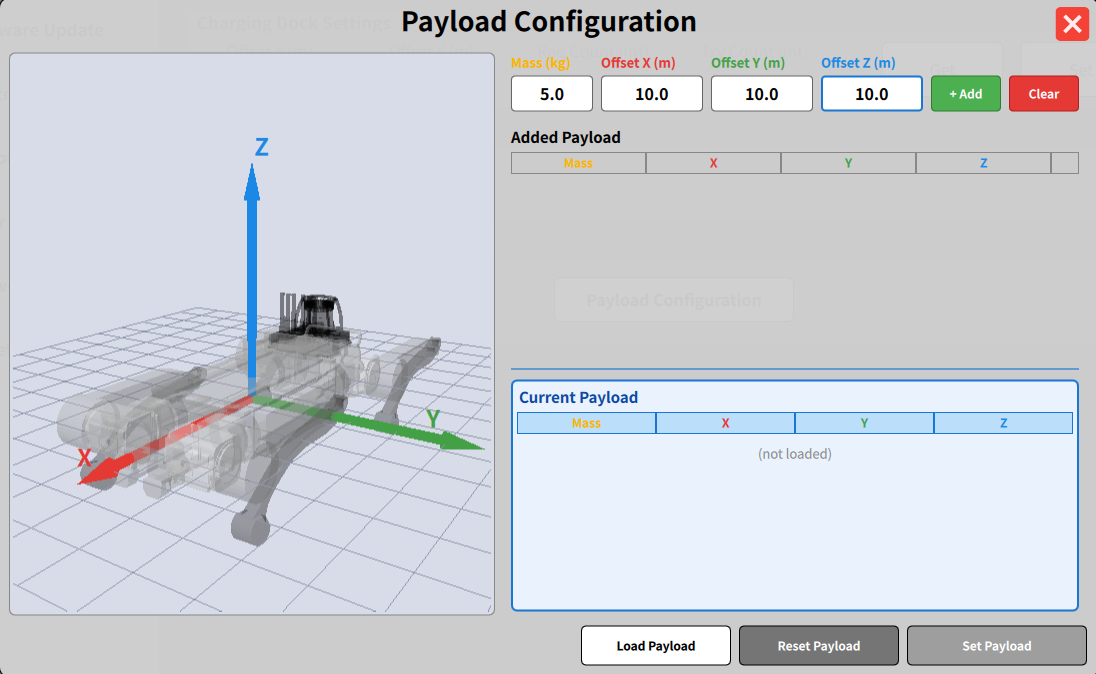
- RBQGUI에서 Payload Configuration을 엽니다.
- 상단 입력 필드에 값을 입력합니다:
- Mass (kg) — 적재물 질량
- Offset X / Y / Z (m) — 로봇 좌표계 기준 적재물 중심 위치
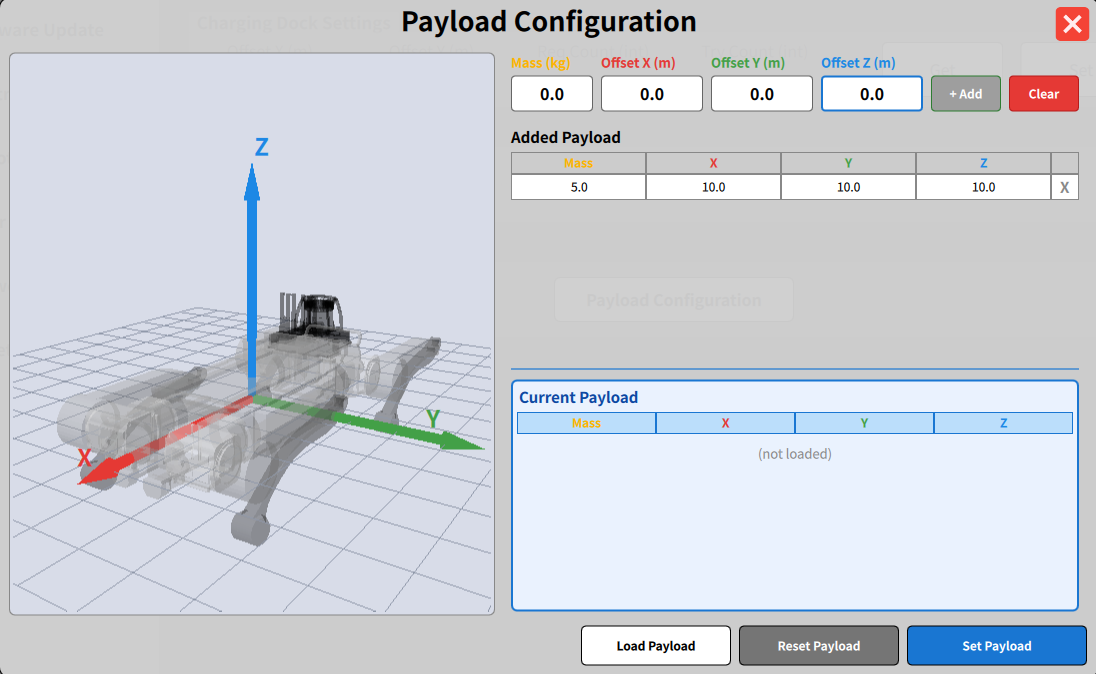
- + Add를 눌러 Added Payload 목록에 추가합니다.
- 입력값이 올바른지 확인한 뒤 Set Payload를 클릭합니다.
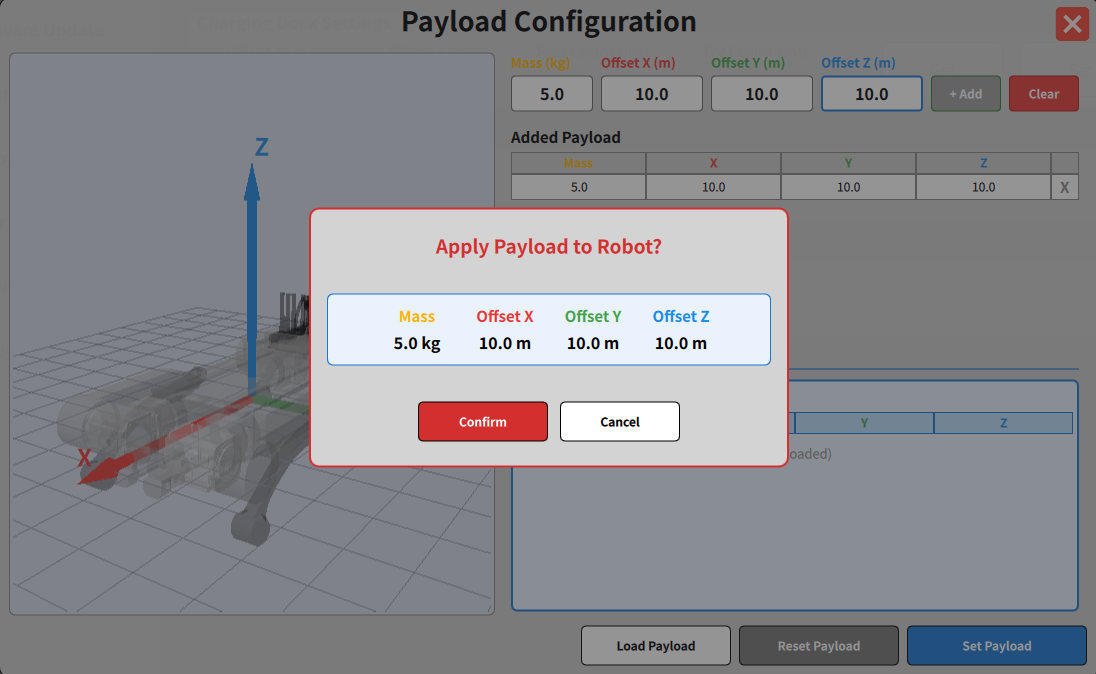
- 확인 팝업이 표시되면 질량/오프셋을 다시 확인하고 Confirm을 눌러 로봇에 적용합니다.
- 필요 시 Load Payload를 눌러 로봇에 현재 적용된 값을 다시 읽어와 입력값과 일치하는지 확인합니다.
버튼 설명
| 버튼 | 기능 |
|---|---|
| + Add | 입력한 질량/오프셋을 후보 목록에 추가 |
| Clear | 현재 입력 필드 초기화 |
| Set Payload | Added Payload 목록을 로봇에 적용 |
| Load Payload | 로봇에 현재 적용된 payload 값 불러오기 |
| Reset Payload | Payload를 기본값(없음)으로 초기화 |
참고
Payload 등록만으로는 충분하지 않습니다 — 다음 단계의 ZMP 캘리브레이션을 통해 새로운 하중 조건에서 균형을 맞추는 자세 보정이 함께 필요합니다.
다음 단계
Payload 등록이 끝났다면 새로운 무게 조건에서 균형을 맞추기 위해 ZMP 캘리브레이션을 수행합니다: