4. 기본 동작 명령
목표: RBQGUI와 조이스틱을 사용하여 로봇의 기본 동작 모드를 명령합니다.
사전 조건: Auto Start가 완료되어야 합니다 (모든 항목이 초록색).
위험
동작 전·중 로봇 주변 2m 이내에 사람이나 동물이 있어서는 안 됩니다. 로봇이 움직이는 동안 절대 만지지 마세요.
Sit 모드
로봇이 안정적인 착석 자세로 앉습니다. 이 상태에서는 조이스틱 입력이 무시됩니다.
포장, 충전, 또는 작업 중단 전에 Sit으로 로봇을 안전하게 내려놓으세요.
Stance 모드
- 현재 앉은 상태 → 로봇이 일어섭니다.
- 현재 Walking 또는 Stair 모드 → 로봇이 멈추고 제자리에 섭니다.
| 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞/뒤 | 앞/뒤 기울기 (피치) |
| L 스틱 | 좌/우 | 좌/우 기울기 (롤) |
| R 스틱 | 앞/뒤 | 몸체 높이 올림/내림 |
| R 스틱 | 좌/우 | 제자리 좌/우 회전 |
Walk 모드
로봇이 조이스틱 방향으로 걸어갑니다.
| 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞/뒤 | 앞/뒤 이동 |
| L 스틱 | 좌/우 | 좌/우 옆걸음 |
| R 스틱 | 앞/뒤 | 앞/뒤 기울기 |
| R 스틱 | 좌/우 | 좌/우 회전 |
Stair 모드
로봇이 계단 경사에 따라 보행 속도와 몸체 기울기를 자동으로 조절합니다.
참고
Stair 모드에서는 R 스틱 앞/뒤 입력이 사용되지 않습니다.
| 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞/뒤 | 앞/뒤 이동 |
| L 스틱 | 좌/우 | 좌/우 옆걸음 |
| R 스틱 | 좌/우 | 좌/우 회전 |
Docking 모드
로봇이 도킹 스테이션에 자율적으로 정렬하고 도킹 완료 후 충전을 시작합니다.
주의
Docking 모드가 활성화된 동안 로봇을 수동으로 움직이지 마세요. 모드를 활성화하기 전에 도킹 스테이션이 올바른 위치에 있고 전원이 연결되어 있는지 확인하세요.
RL (Vision Trot) 모드
비전 기반 강화학습 정책으로 보행합니다. 탑재된 카메라를 이용해 지형에 동적으로 반응하므로 불규칙하거나 예측하기 어려운 지면에서 유용합니다.
| 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞/뒤 | 앞/뒤 이동 |
| L 스틱 | 좌/우 | 좌/우 옆걸음 |
| R 스틱 | 좌/우 | 좌/우 회전 |
보행 파라미터 설정
GUI에서 로봇 보행 동작을 실시간으로 세밀하게 조정할 수 있습니다.
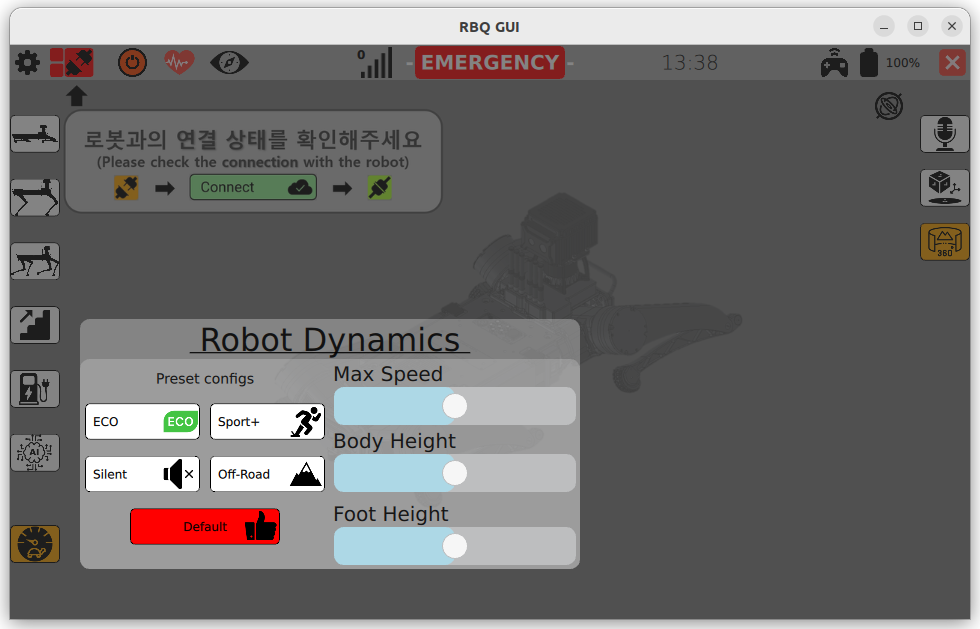
| 파라미터 | 설명 |
|---|---|
| Max Command Speed | 최대 보행 속도 제한 |
| Body Height | 지형 통과 여유를 위한 몸체 높이 조절 |
| Foot Height | Swing 단계에서 발이 들리는 높이 조절 |
다음 단계
로봇의 실시간 센서 및 시스템 상태를 확인하세요: