1. 초기 자세 설정 및 전원 켜기
목표: 로봇을 평평한 바닥에 올바른 초기 자세로 놓고 안전하게 전원을 켭니다.
사전 조건
- 로봇 주변 최소 2m 반경에 충분한 공간이 확보된 평평하고 안정적인 바닥
- 로봇 배터리 충전 완료
- 로봇 주변 2m 이내에 사람이나 동물 없음
초기 자세 설정
모든 발과 무릎이 동시에 바닥에 닿도록 로봇을 내려놓습니다.
1단계. 평평한 바닥 선택
수평인 바닥에 로봇을 놓습니다. 바닥이 고르지 않으면 Auto Start가 실패할 수 있습니다.
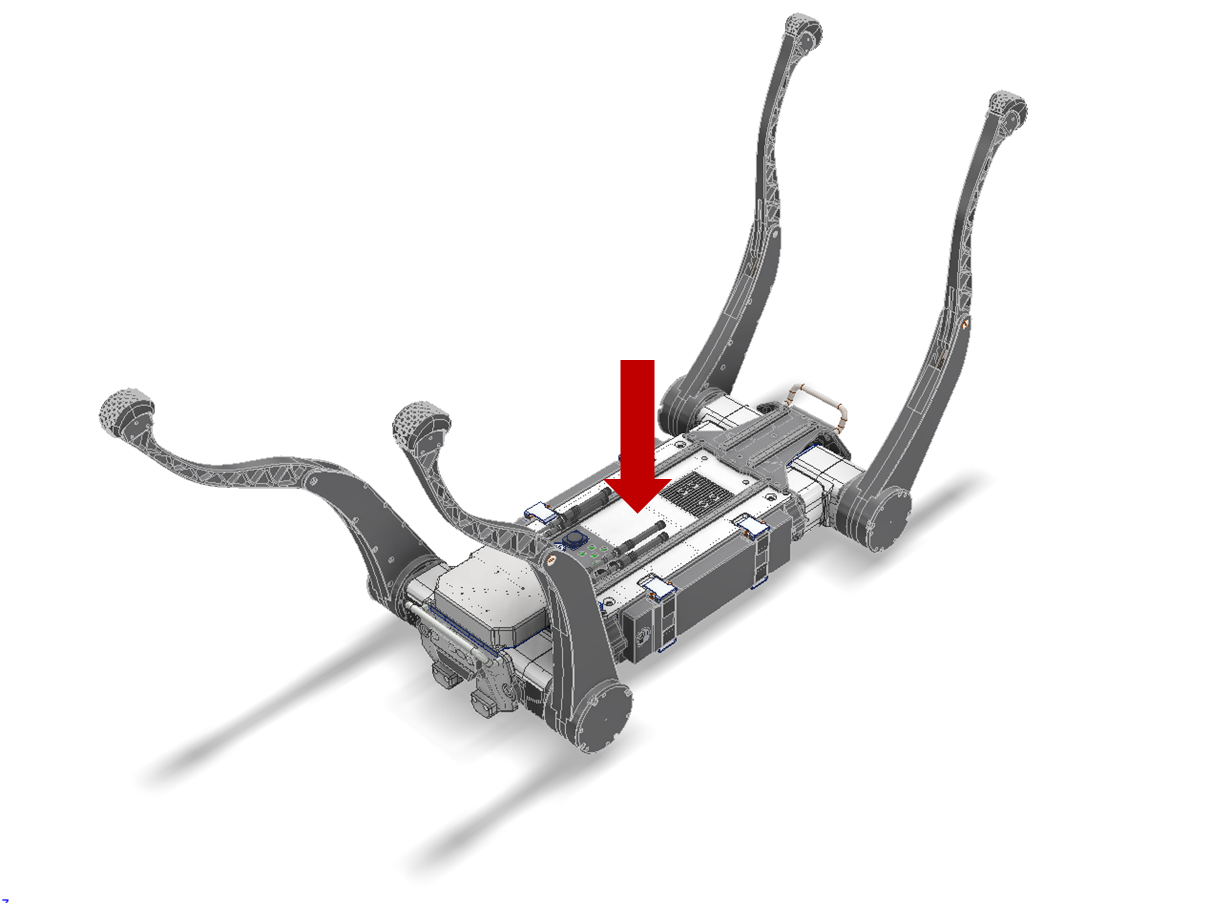
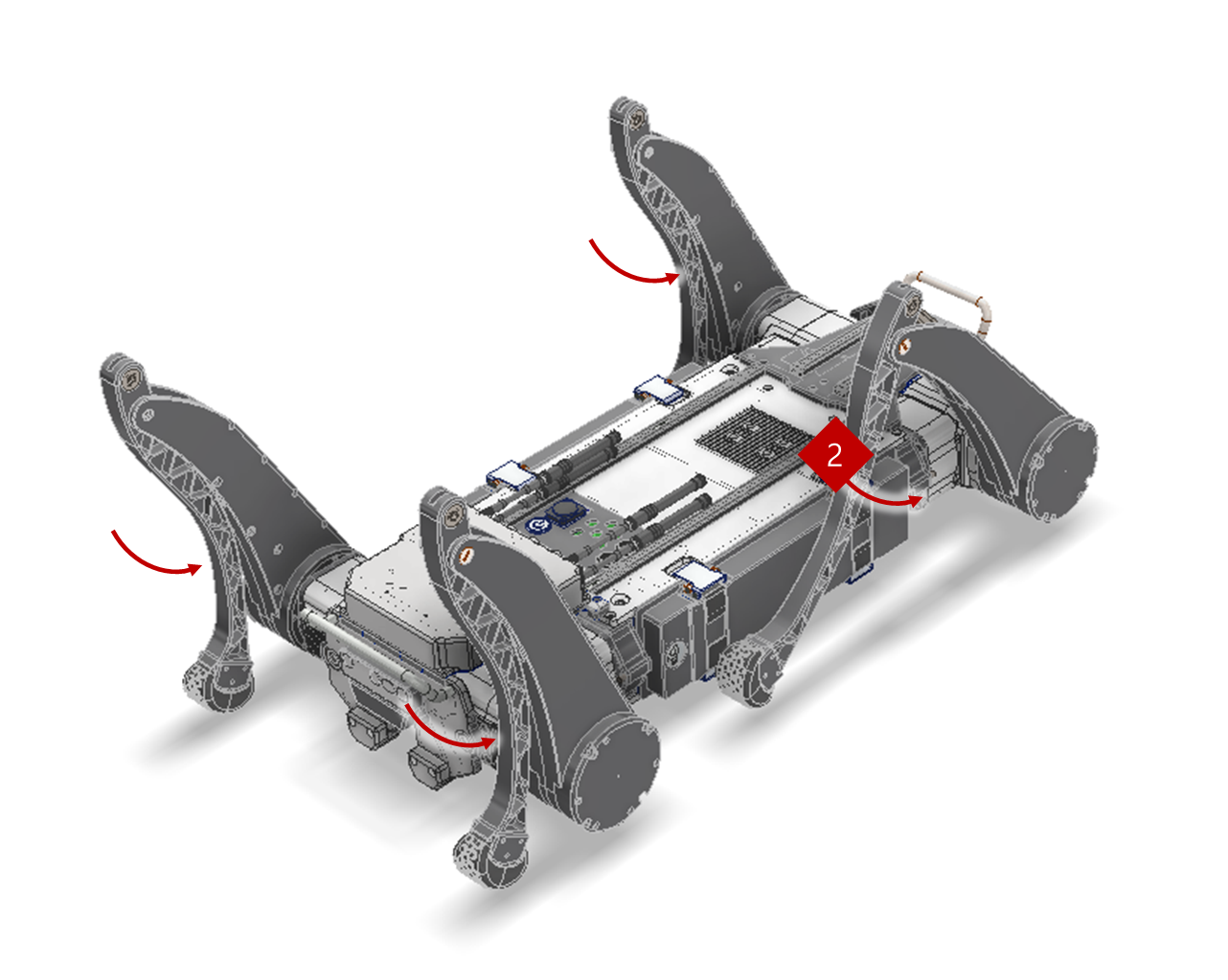
2단계. 무릎 관절 완전히 접기
무릎 패드가 바닥에 가까워지도록 네 다리의 무릎 관절을 끝까지 접습니다.
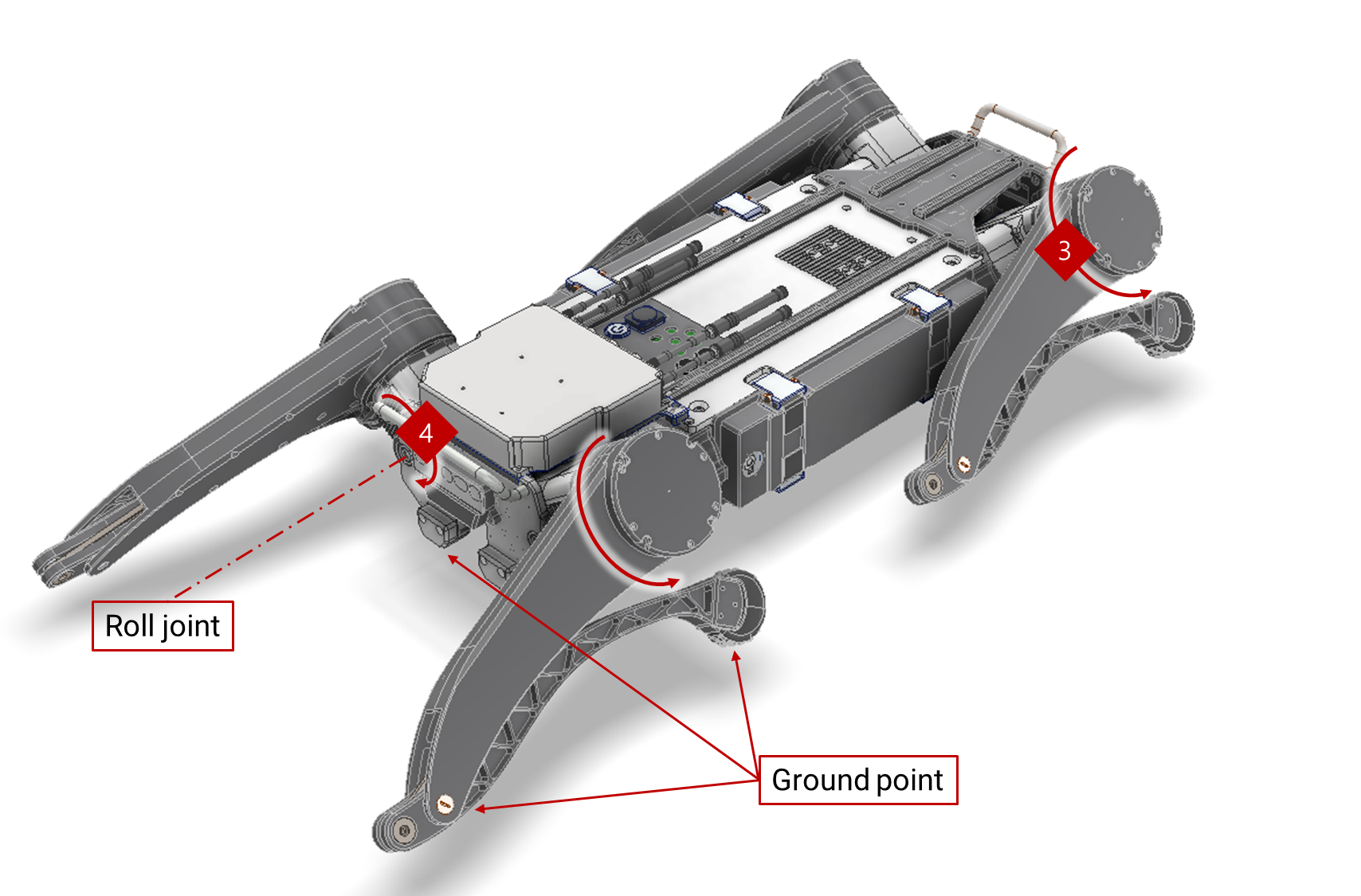
3단계. 세 곳의 바닥 접촉점 설정
바디 범퍼, 무릎 관절, 발 — 세 접촉점이 모두 바닥에 닿도록 힙 피치·롤 관절을 조정합니다.
경고
초기 자세가 올바르지 않으면 Auto Start가 실패하고 로봇이 예기치 않게 넘어질 수 있습니다. 전원을 켜기 전에 반드시 세 접촉점을 모두 확인하세요.
전원 켜기

- 로봇 본체의 전원 버튼을 누릅니다.
- 버튼의 빨간 표시등이 켜지는지 확인합니다.
- 이중 비프음이 들리면 부팅 시퀀스가 시작된 것입니다.
로봇이 완전히 초기화되는 데 약 30~60초가 걸립니다. 이 시간 동안 로봇을 건드리지 마세요.
다음 단계
로봇이 켜지고 초기화되면 컨트롤러와 Wi-Fi를 연결합니다: