2. 레일 & 스프링 너트
목표: 스프링 너트를 사용해 추가 모듈 하드웨어를 로봇 상부 레일에 장착합니다.
사전 조건: 1단계 사양 확인 완료 — 추가 모듈이 적재량/인터페이스 한계 내에 있어야 합니다.
필요한 것
| 항목 | 상세 |
|---|---|
| 스프링 너트 | MISUMI SHNTP5-5 (KR · US) |
| 볼트 | 추가 모듈 장착부에 맞는 M5 볼트 |
| 강체 막대 | 제거용, 직경 ≤ 4 mm |
로봇 상부 레일은 선택 하드웨어(PTZ 카메라, LiDAR, 커스텀 브래킷)를 장착하기 위한 인터페이스입니다. 레일 슬롯에 스프링 너트를 삽입하면 M5 볼트를 체결할 수 있는 나사 고정점이 생깁니다.
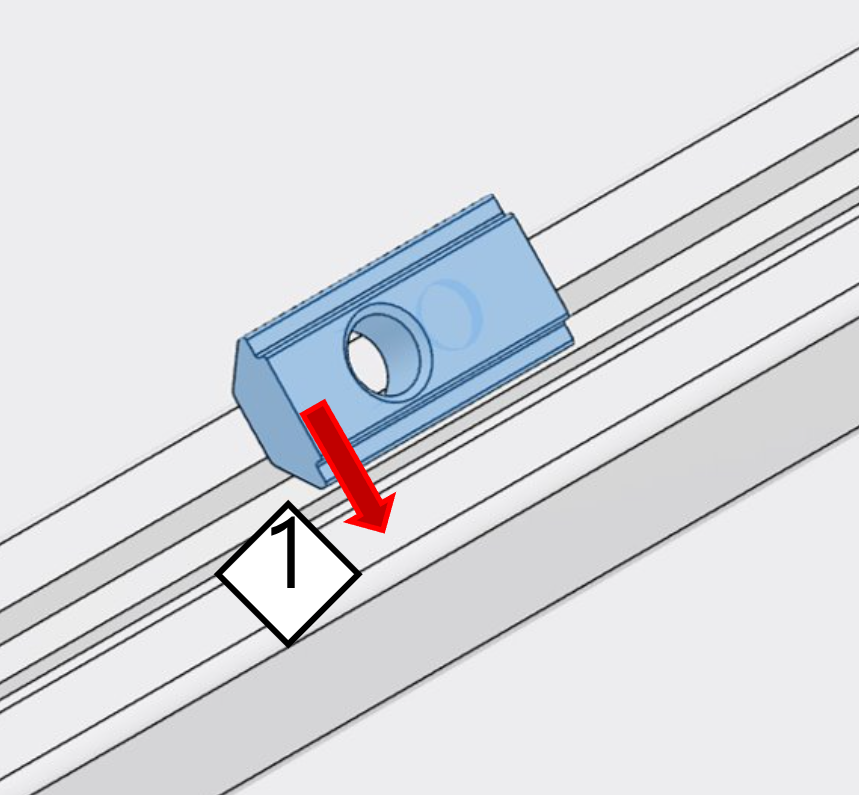
스프링 너트 삽입
- 비스듬히 삽입 — 스프링 너트를 레일 슬롯에 대각선으로 밀어 넣어 내부 채널로 진입시킵니다.
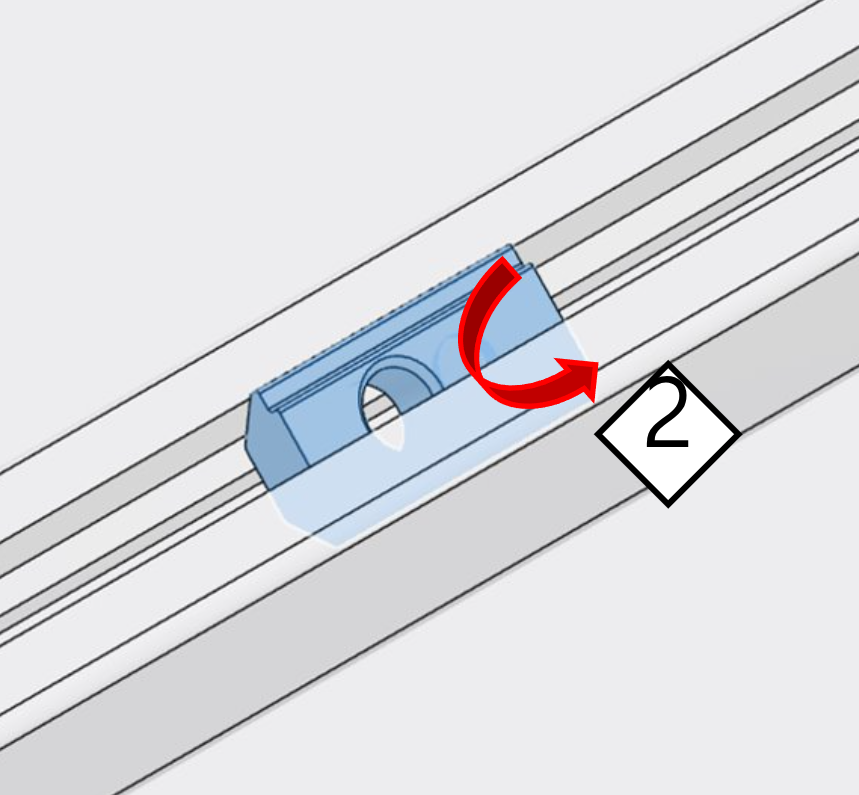
- 돌출부 누르기 — 너트 일부가 슬롯 위로 돌출될 수 있으니, 채널에 완전히 안착할 때까지 눌러줍니다.
- 레일과 정렬 — 슬롯과 정렬되어 레일을 따라 자유롭게 이동할 수 있도록 조정합니다.
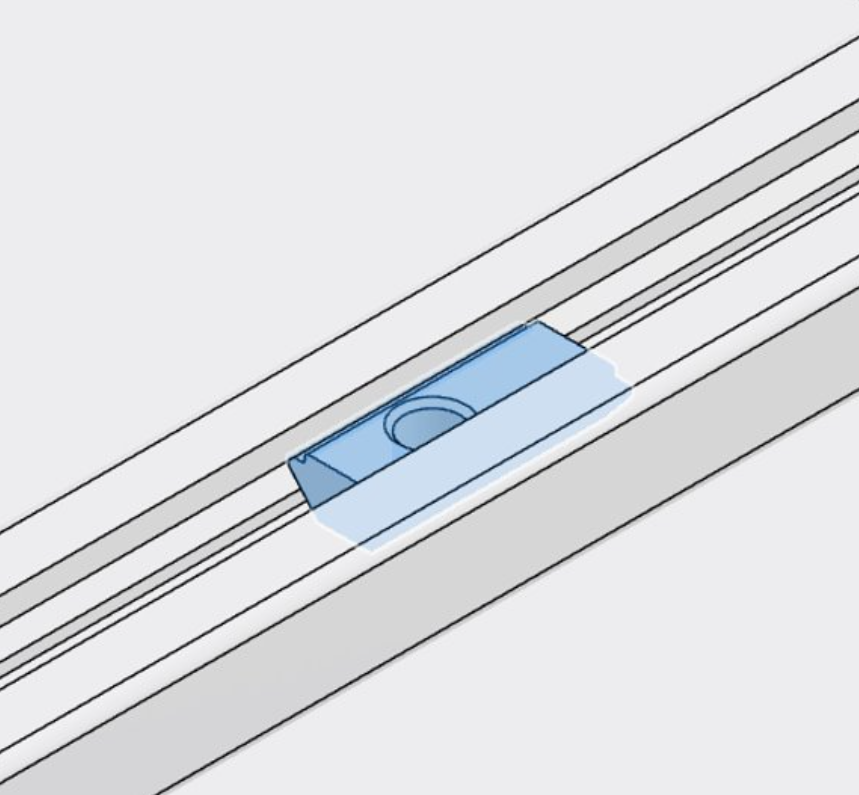
너트를 추가 모듈 브래킷이 위치할 곳까지 이동시킨 후 M5 볼트로 브래킷을 고정합니다.
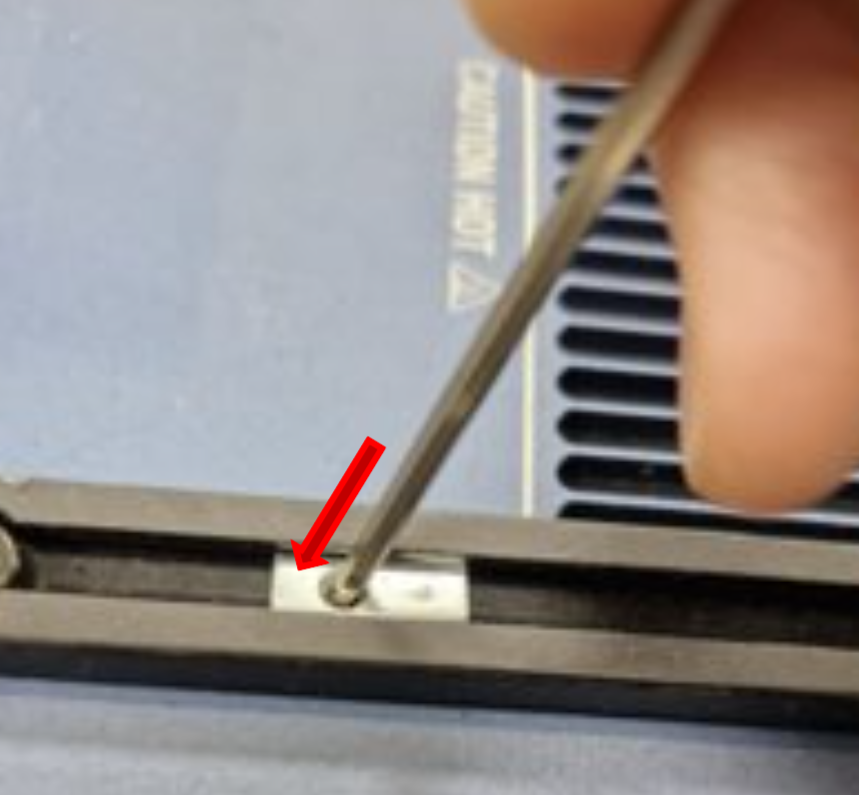
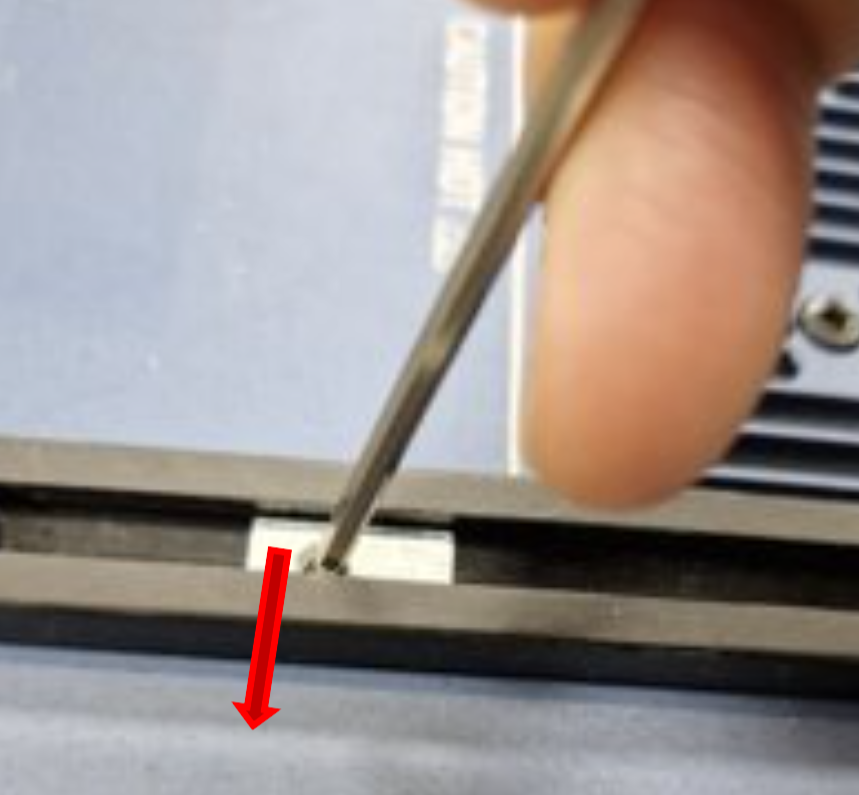
스프링 너트 제거
주의
공구 직경: 직경 4 mm 이하의 강체 막대를 사용하세요. 더 굵은 공구는 너트를 손상하거나 레일 슬롯에 흠집을 낼 수 있습니다.
- 막대 삽입 — 스프링 너트의 구멍에 강체 막대(≤ 4 mm)를 통과시킵니다.
- 한쪽 벽으로 밀기 — 너트를 레일 슬롯의 한쪽 내벽 방향으로 밀어줍니다.
- 비틀어 들어올리기 — 한쪽 벽에 댄 상태로 반대편으로 비틀어 들어올려 너트가 레일 단면을 벗어나게 합니다.
- 제거 — 슬롯에서 너트를 빼냅니다.


다음 단계
하드웨어 장착이 끝났습니다. 이제 GUI에서 추가 모듈의 질량과 오프셋을 등록합니다: