로봇 퀵스타트
로봇 초기 자세 설정
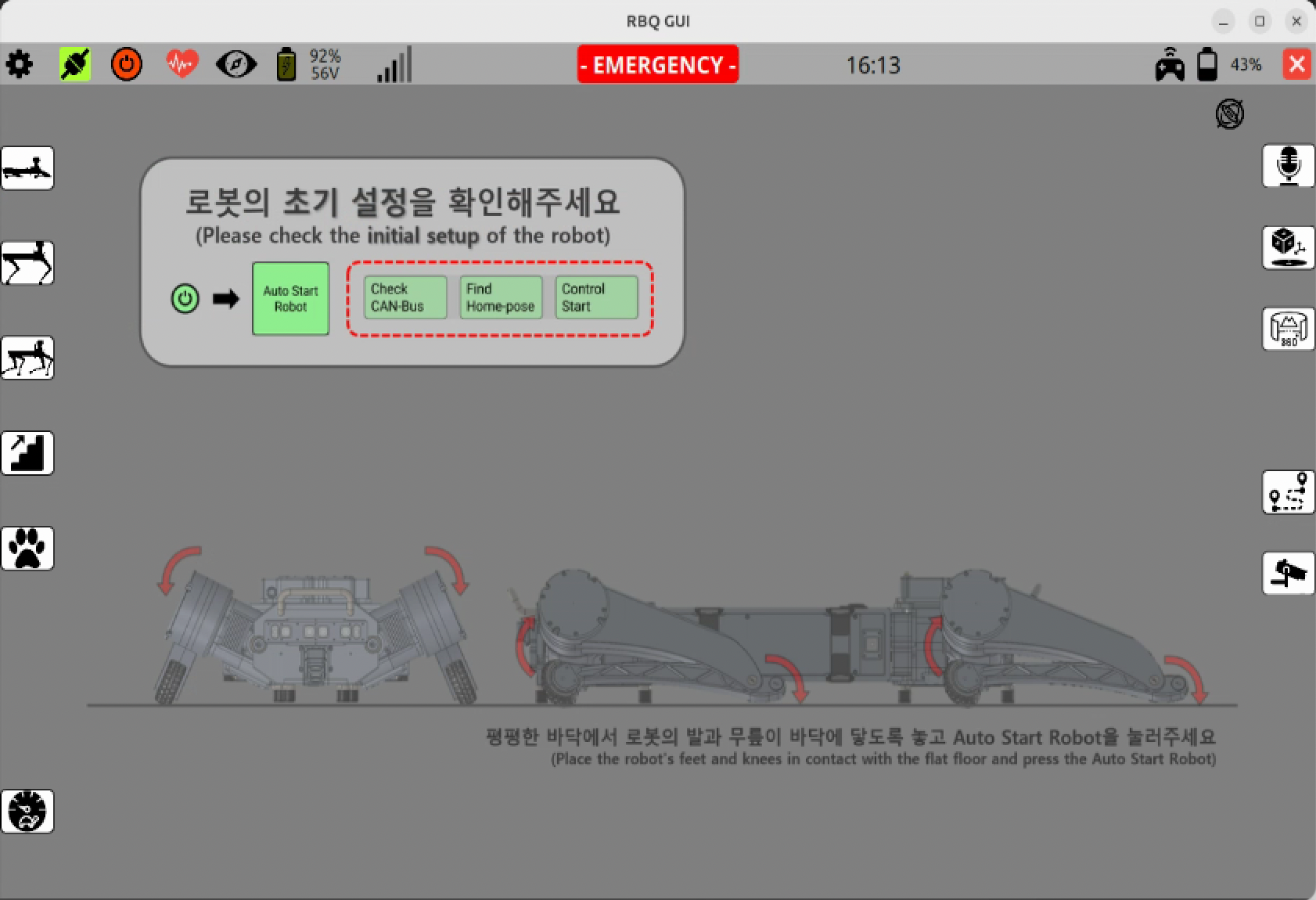
평평한 바닥에 로봇을 놓고, 모든 발과 무릎이 바닥에 접촉하도록 합니다. 아래 이미지의 로봇 자세를 참고하세요.

1단계. 평평한 바닥이 필요합니다.
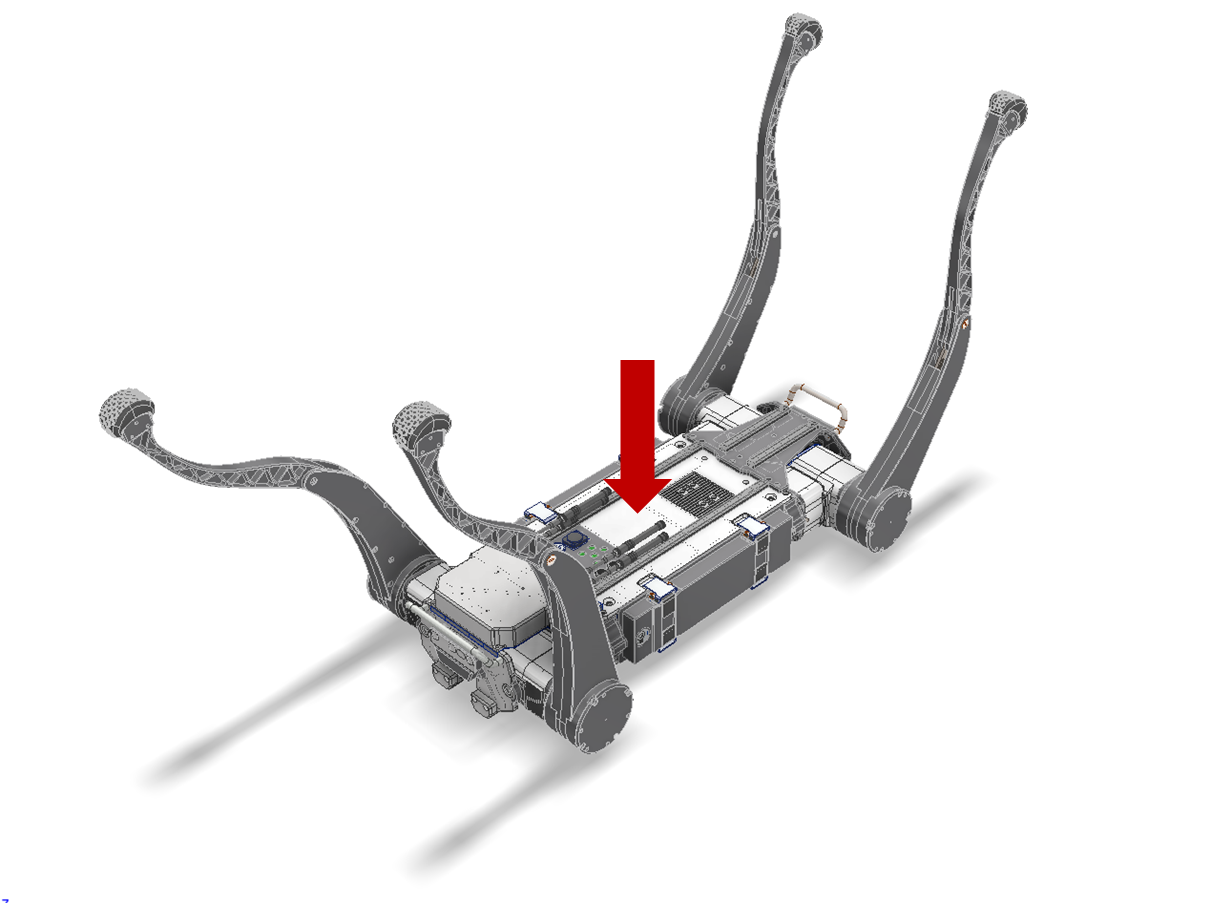
2단계. 무릎 관절을 완전히 접습니다.
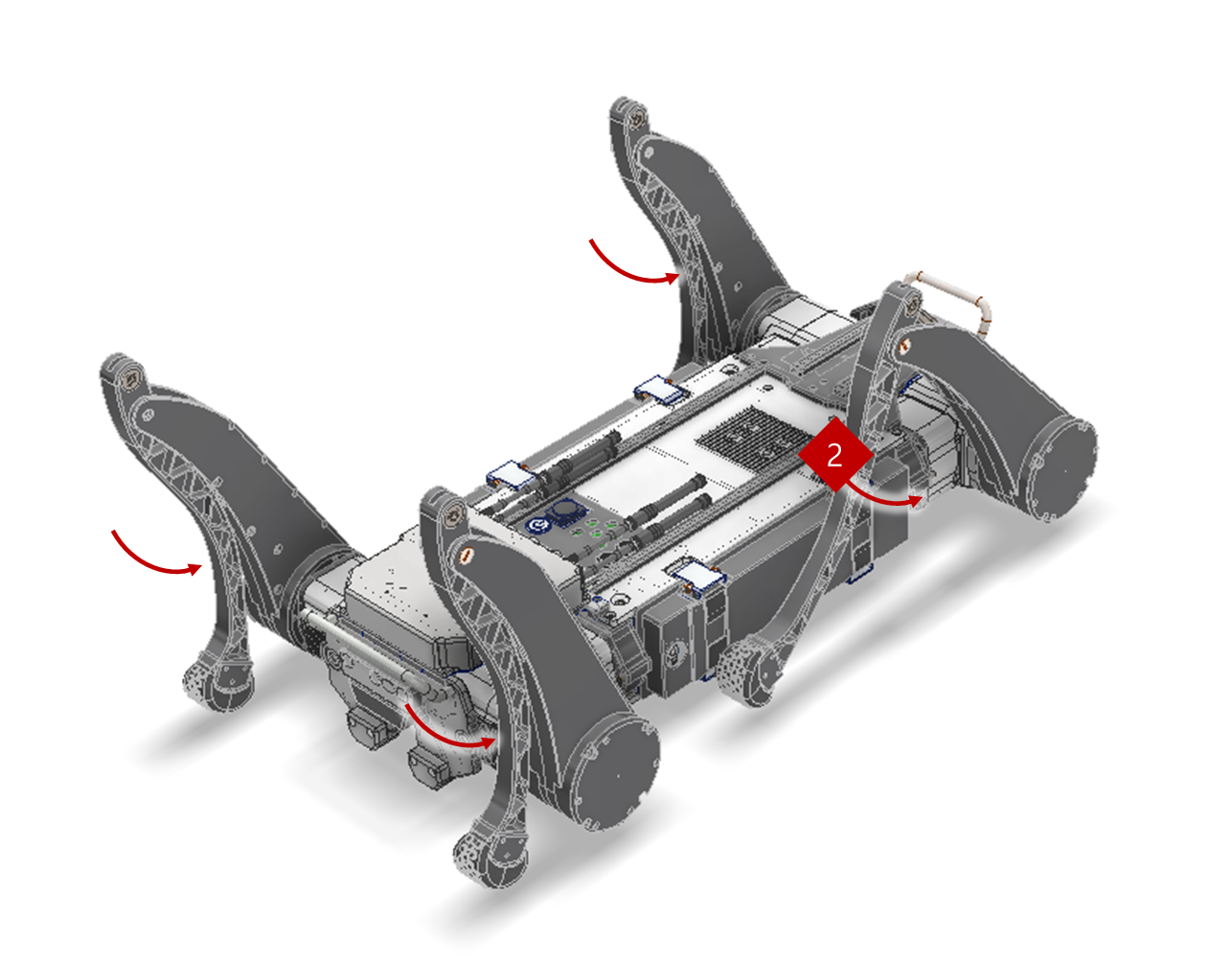
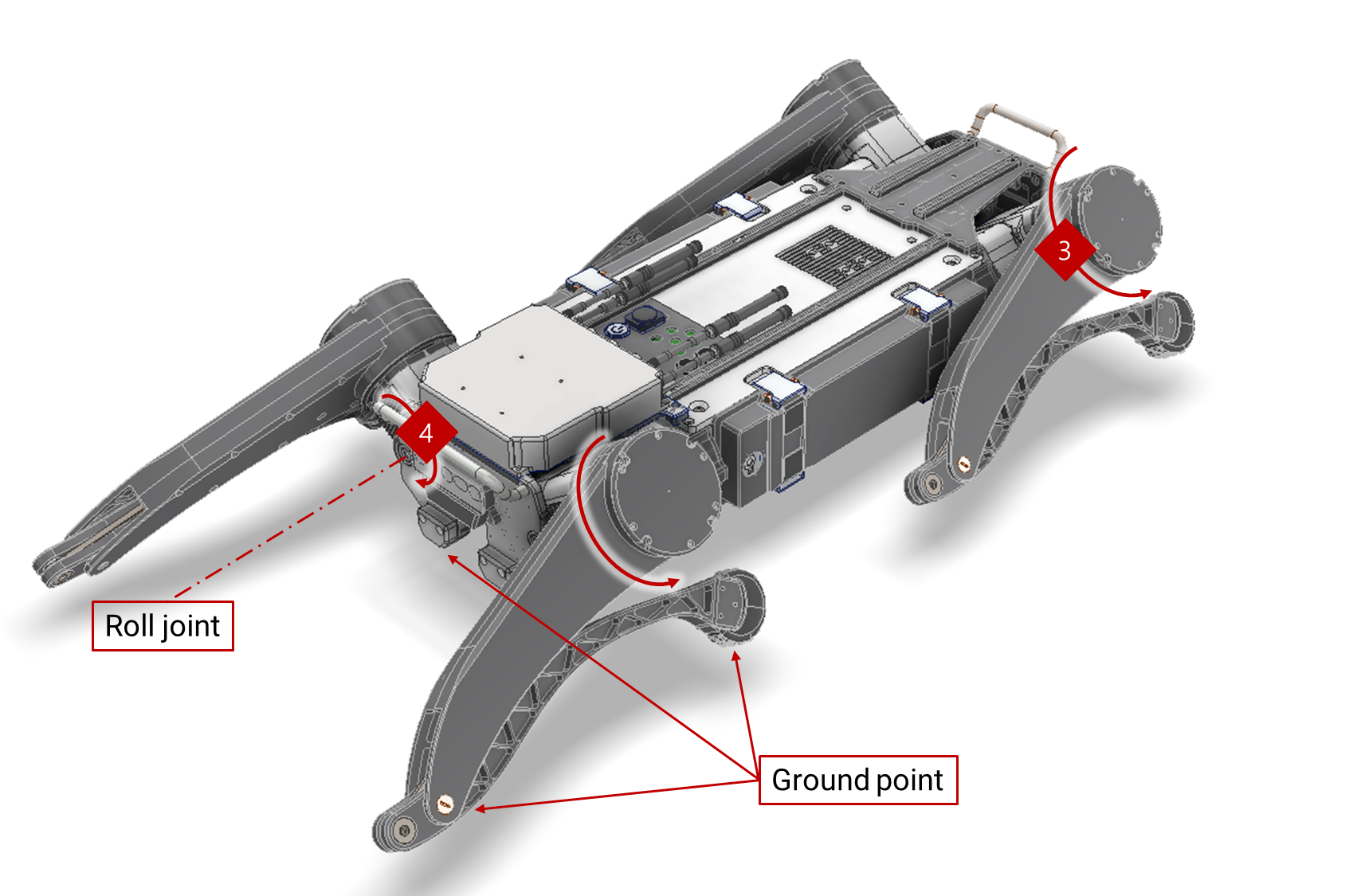
3단계. 힙, 피치, 롤 관절을 회전시켜 "발"과 "무릎" 이 바닥에 닿도록 합니다. 바닥 접촉점은 세 곳입니다. (바디 범퍼, 무릎 관절, 발)
로봇 전원 켜기

- 전원 버튼을 누르고 버튼의 빨간 불이 켜지는지 확인합니다
- 이중 비프음이 들리는지 확인합니다
컨트롤러(Steam Deck)와 Wi-Fi 연결
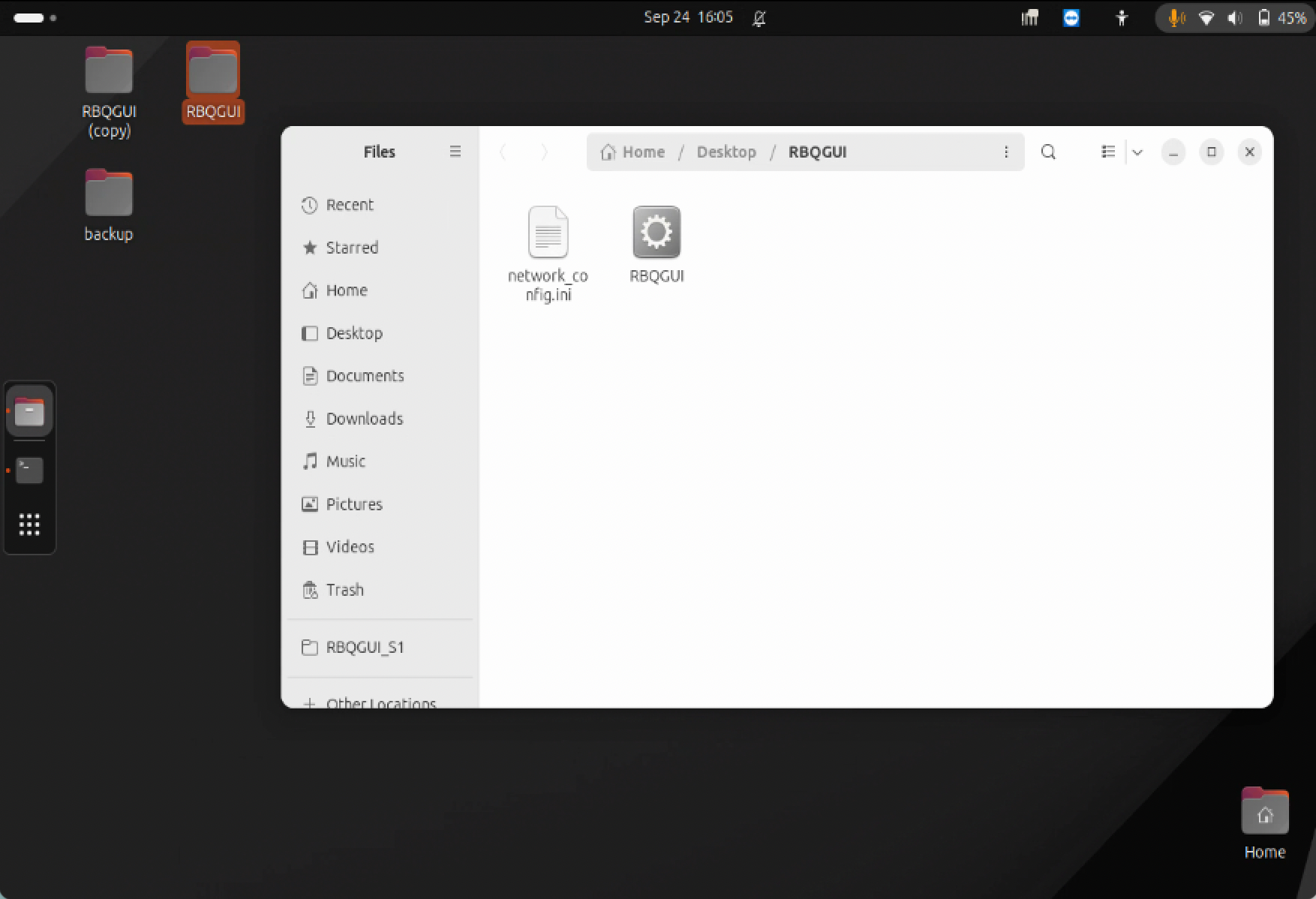
1단계: RBQGUI 앱 열기
STEAM DECK 바탕화면에서 RBQGUI 앱을 실행합니다.
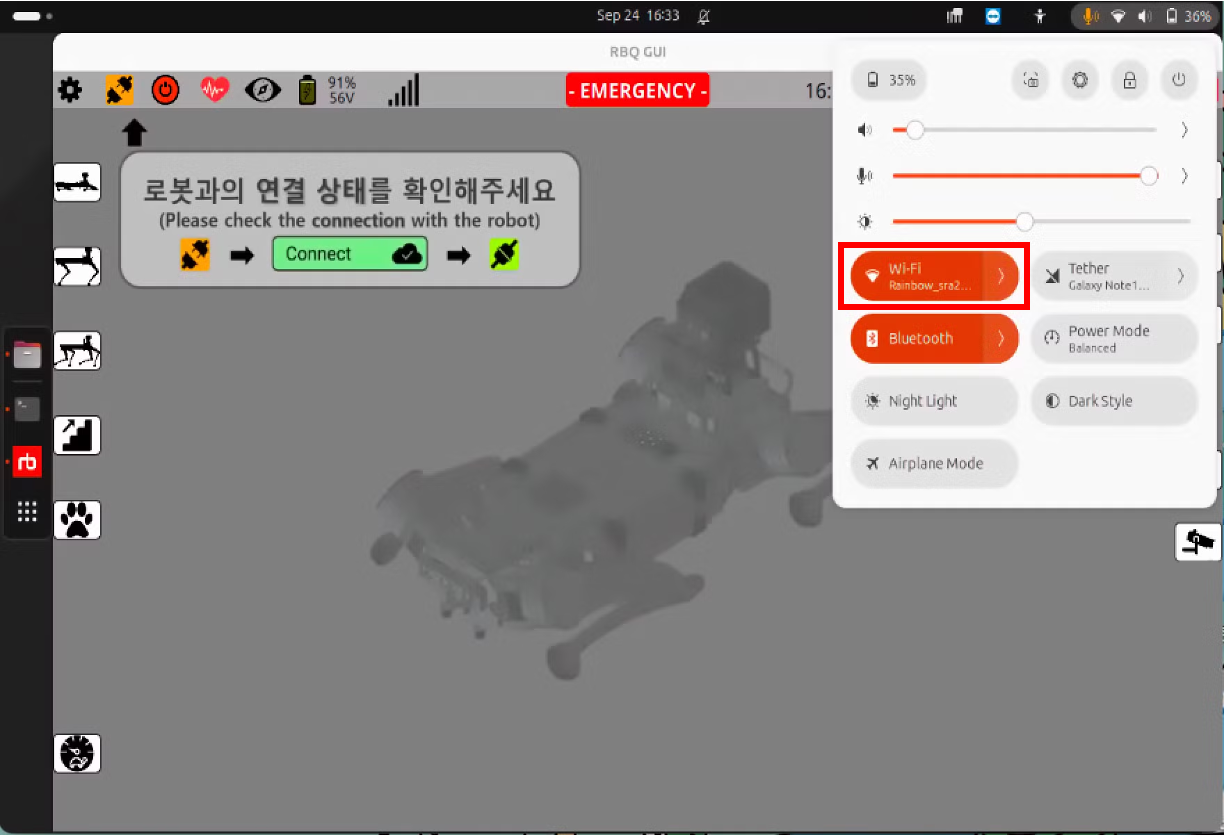
2단계: Wi-Fi 연결
STEAM DECK의 Wi-Fi를 RBQ_{XX}라는 이름의 Wi-Fi에 연결합니다.
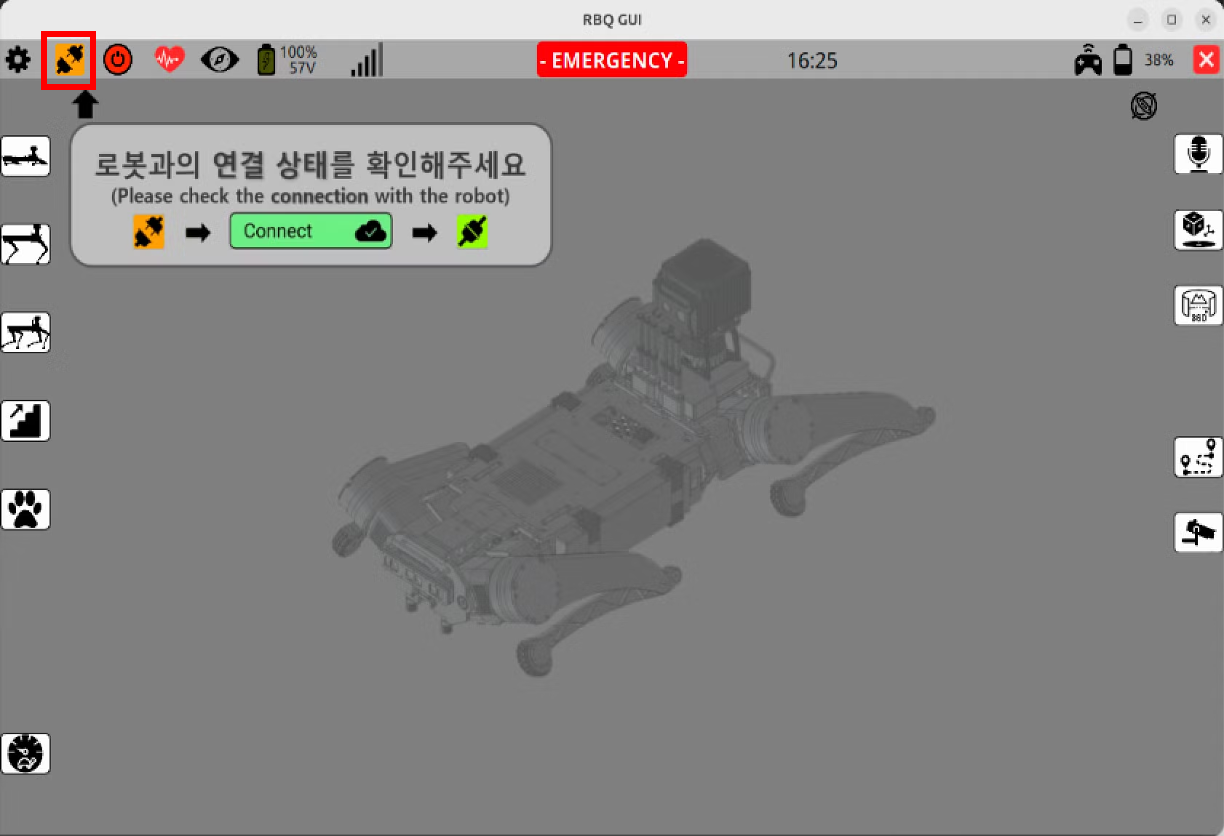
3단계: STEAM DECK과 로봇 연결
- 상단 바 왼쪽의
Remote Controller-Robot Communication Connection버튼(주황색)을 누릅니다. 팝업 창이 활성화됩니다.
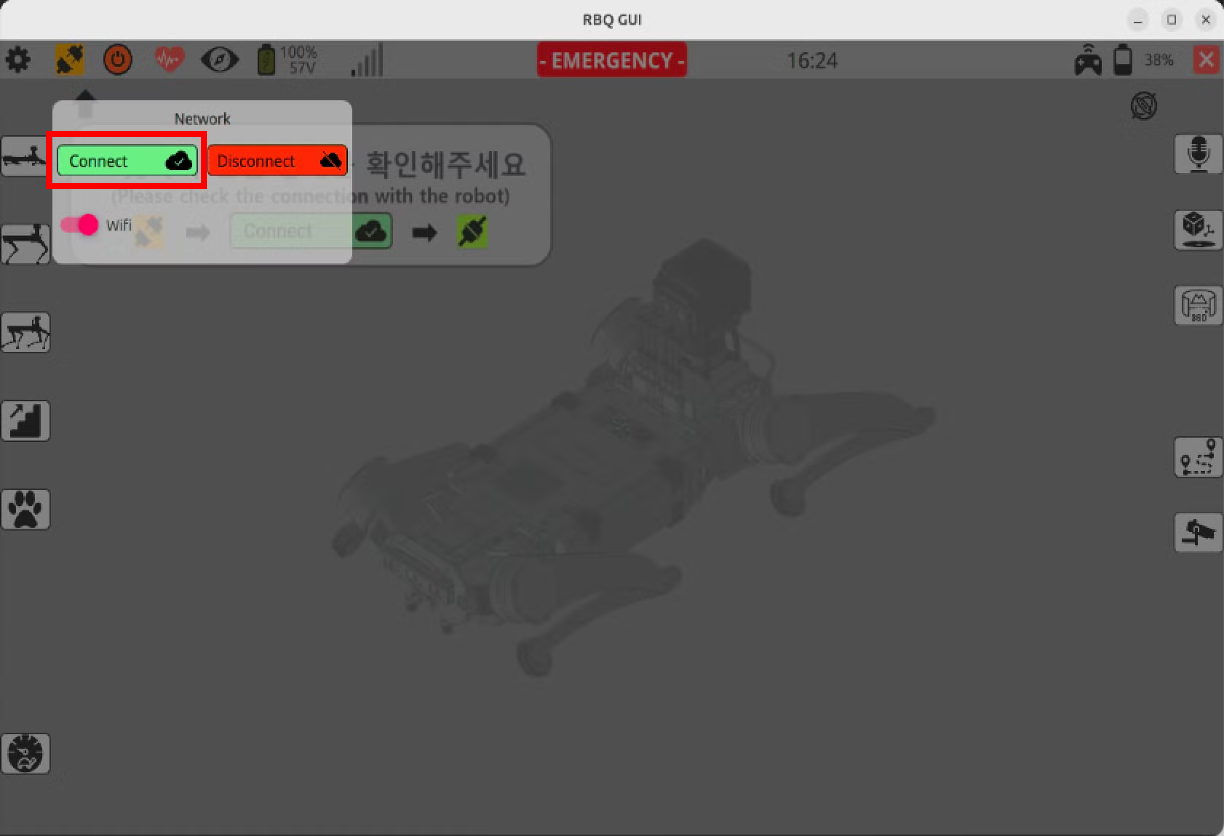
- 팝업 창에서
Connect버튼을 누릅니다.
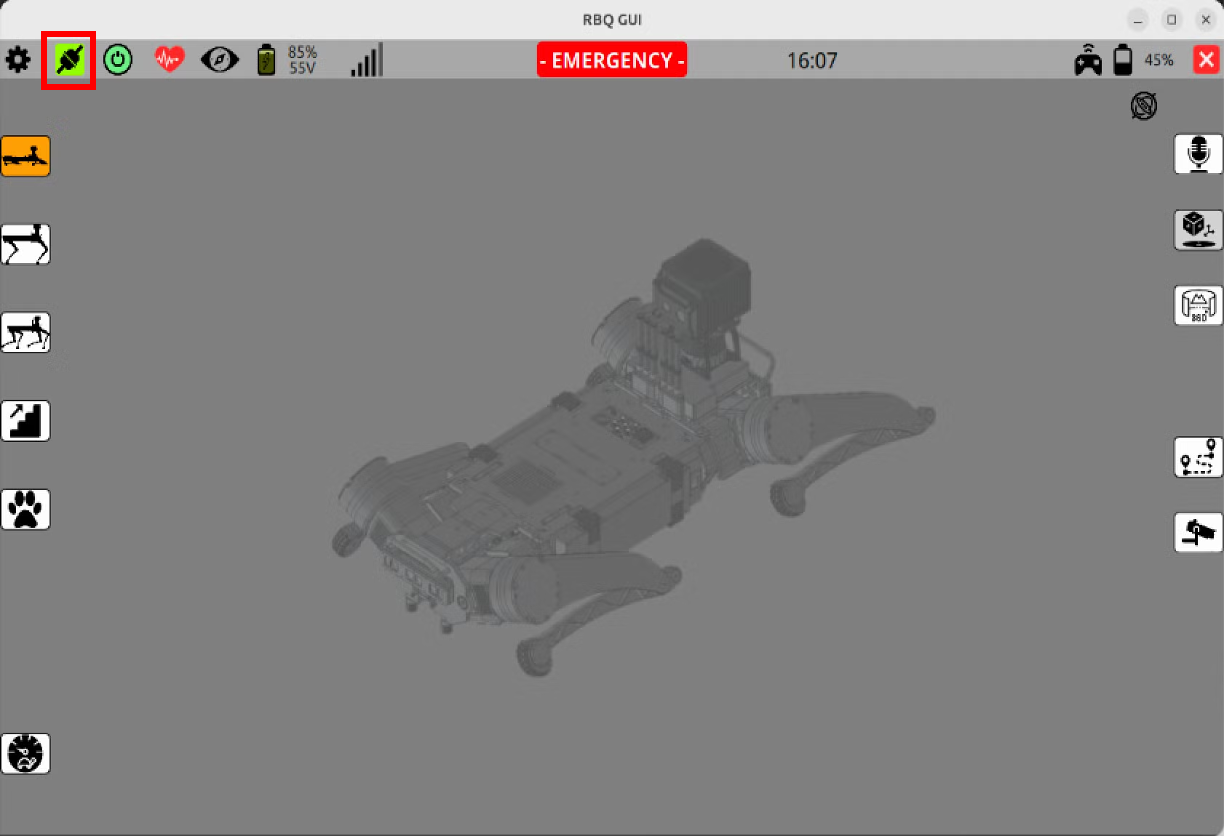
STEAM DECK과 로봇이 정상적으로 연결되면Remote Controller-Robot Communication Connection버튼이 녹색으로 변합니다.
4단계: 자동 시작
- 상단 바 왼쪽의
Robot Initial Setup버튼(빨간색)을 누릅니다. 팝업 창이 활성화됩니다.
- 팝업 창에서
Auto Start Robot버튼을 누릅니다.
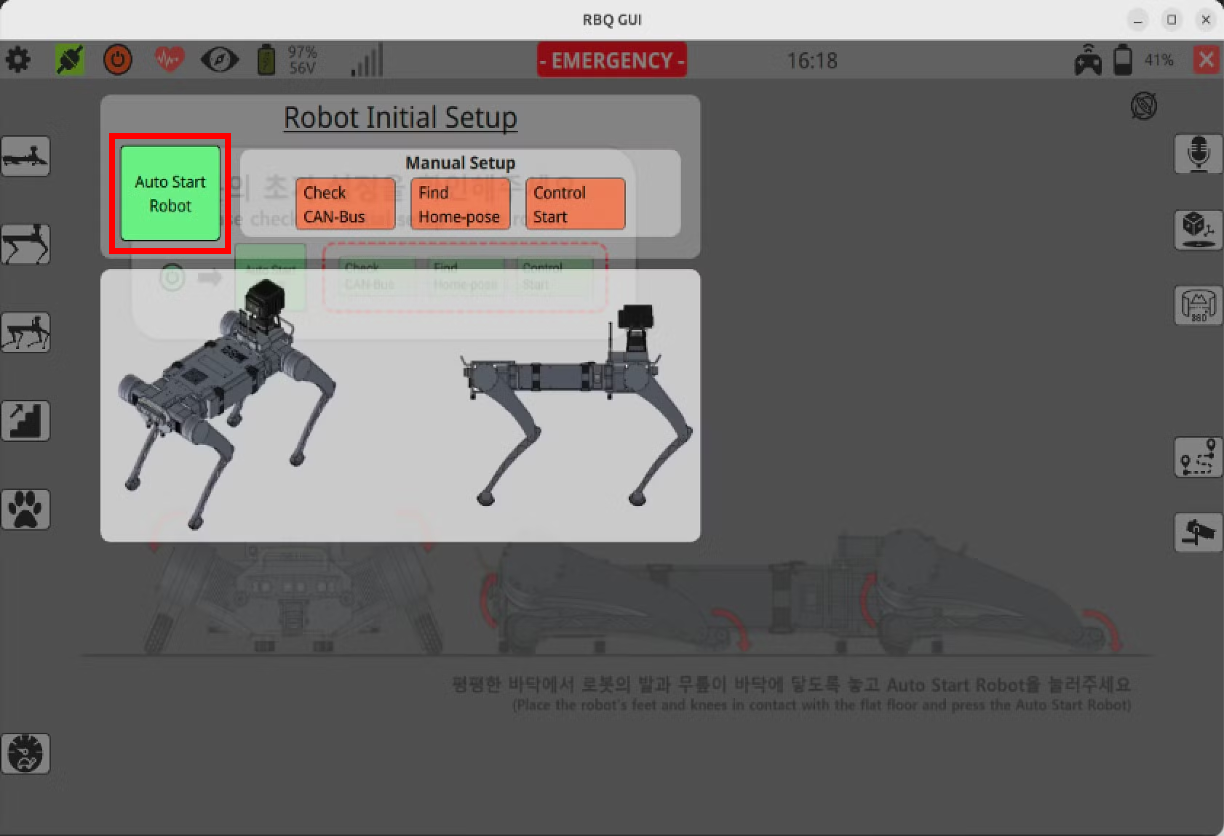
- 세 개의
Manual Setup버튼이 모두 녹색으로 변하는지 확인합니다.
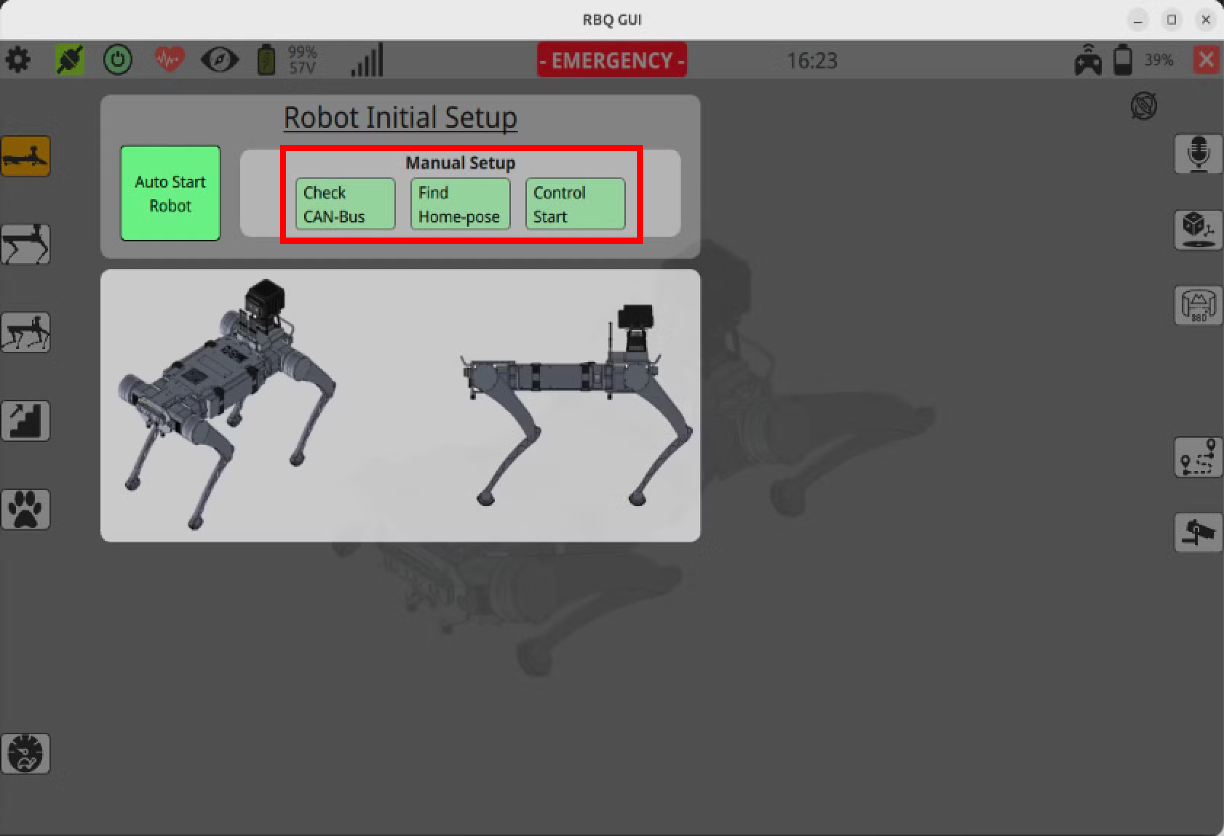
⚠️ 세 개의
Manual Setup버튼 중 하나라도 녹색으로 변하지 않으면,
다음 지침을 따르세요:
Check CAN-Bus가 실패한 경우, 로봇을 재시작하세요.Find Home-pose가 실패한 경우, 로봇의 다리 자세를 확인하고 로봇을 다시 재시작하세요.