기계적 안전
RBQ의 관절, 다리, 구동부 등 기계 부분으로 인한 부상·손상을 방지하기 위한 사항입니다.
동작 범위 및 접근
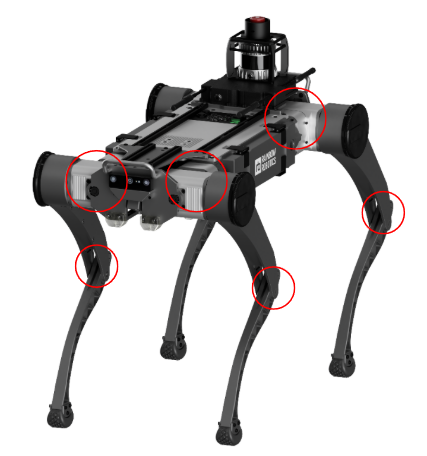
위 그림에서 빨간 원으로 표시된 부분은 끼임·충돌 위험이 있는 위험 구역입니다. 힙 관절·다리 관절 주변으로, 취급·운반·점검 시 손가락·옷·케이블·긴 머리·장신구가 끼지 않도록 해당 구역에 접근하지 마세요.
경고
1) 로봇이 움직이는 동안 동작 범위 안으로 들어가거나 로봇 본체·다리에 손이나 신체를 넣지 마세요. 끼임·충돌로 부상할 수 있습니다.
2) 로봇이 넘어지거나 보정 동작을 할 때 주변에 사람이나 물건이 있으면 충돌할 수 있으므로, 충분한 여유 공간을 확보하세요.
이동 방식과 속도
- 보행: RBQ는 4족 보행으로 이동합니다. 매뉴얼 및 GUI에서 안내하는 속도·가속도·하중 한도를 지키세요. 속도 변경은 즉시 반영되며, 실제 속도는 바닥 마찰·조작 입력·균형 보정 동작·장애 상황 등에 따라 달라질 수 있습니다.
- 설정 준수: 과부하나 과속은 고장·불안정 동작의 원인이 됩니다. 로봇이 외부 물체와 충돌하면 큰 운동 에너지가 발생할 수 있으므로, 작업 환경에 맞는 안전 설정을 적용하세요.
관절·다리·끼임 위험
- 끼임 위치: 끼임 위험은 주로 힙 관절(엉덩이 관절)과 다리 관절 주변에 있습니다. 정상 주행 중에는 손이 닿기 어렵지만, 취급·운반·점검 시에는 손가락·옷·케이블·긴 머리·장신구가 끼지 않도록 주의하세요.
- 이상 시 정지: 소리가 나거나 움직임이 어색할 때는 즉시 비상 정지하고, 원인 확인 후 사용하세요.
계단·경사·불규칙한 바닥
주의
계단이나 고르지 않은 표면에서는 로봇이 자세를 맞추려 하며, 오류를 완전히 제거할 수는 없습니다. 급격한 수동 개입이나 강제로 멈추게 하는 행위는 하지 마세요. 계단·경사 구역에서는 접근 거리와 속도를 제한하고, 필요 시 약 2m 이상 여유를 두세요.
설치·이동
- 평탄한 바닥: 로봇은 지정된 사양에 맞는 평탄하고 안정된 바닥에서 사용하세요. 경사·미끄러운 면에서는 넘어질 수 있습니다.
- 취급·운송: 이동·포장·운송 시 안내에 따라 진행하세요. 자세한 내용은 취급 및 운송을 참고하세요.