한국어
Appearance
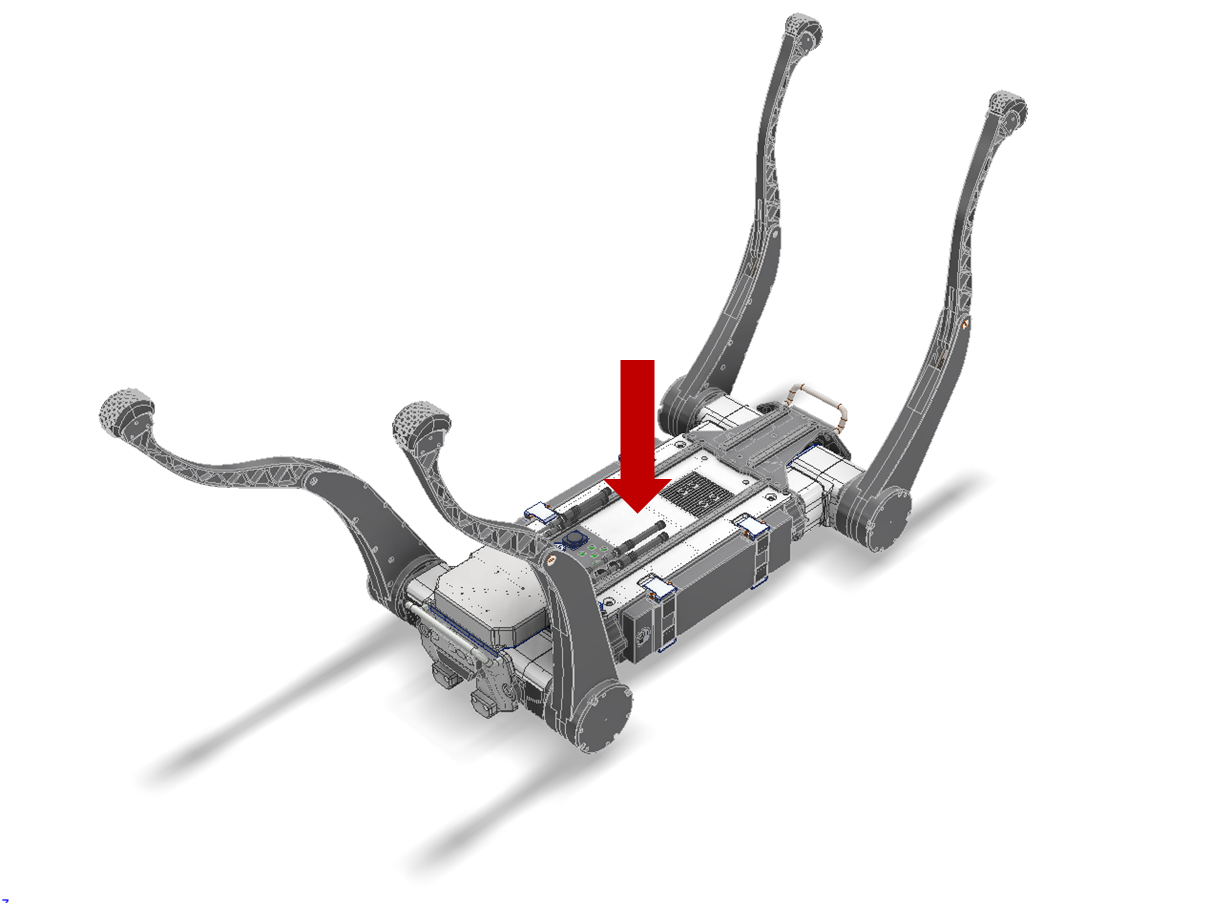
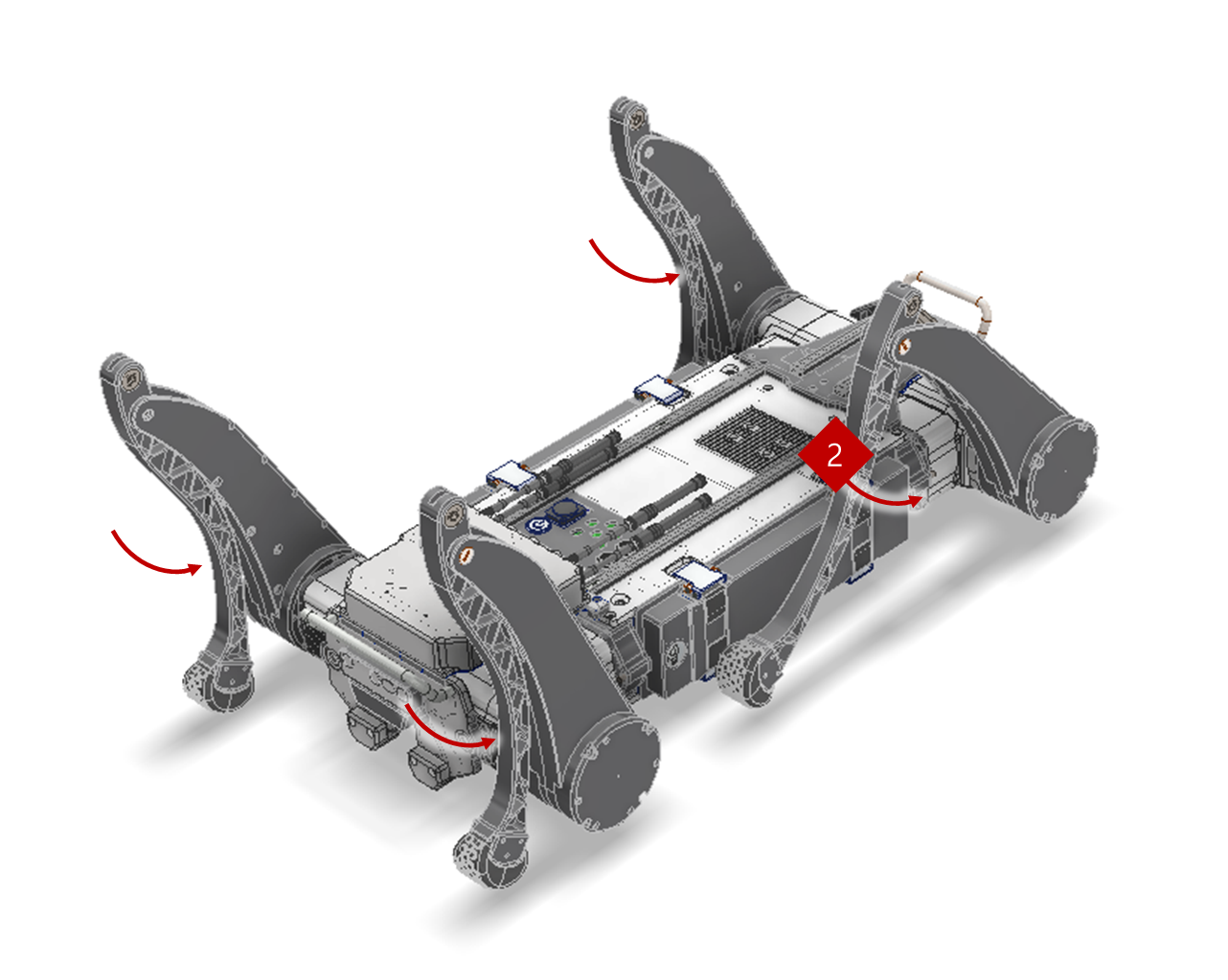
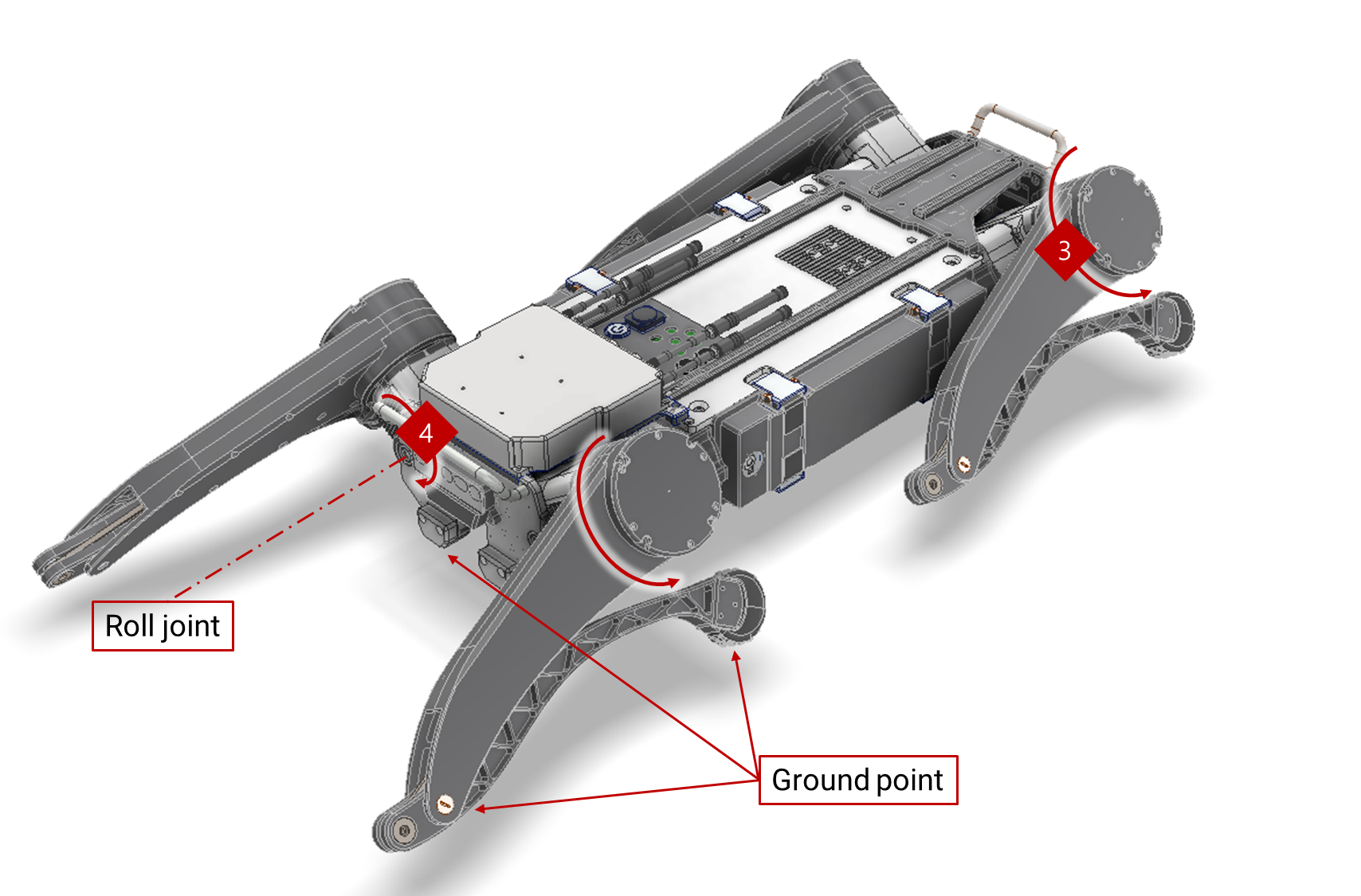
평평한 바닥에 로봇을 놓고, 모든 발과 무릎이 바닥에 접촉하도록 합니다. 아래 이미지의 로봇 자세를 참고하세요.
- 전원 버튼을 누르고 버튼의 빨간 불이 켜지는지 확인합니다
- 이중 비프음이 들리는지 확인합니다