도킹 캘리브레이션
안정적인 도킹을 위해 RBQGUI에서 도킹 기능 관련 파라미터를 조정할 수 있습니다.
사전 준비
- 도킹을 시험할 수 있는 위치로 로봇을 이동해 주세요.
- 주변에 장애물이 없도록 해 주세요.
- RBQGUI가 로봇에 연결된 상태여야 합니다.
진행 순서
RBQGUI를 실행한 뒤 로봇에 연결합니다.
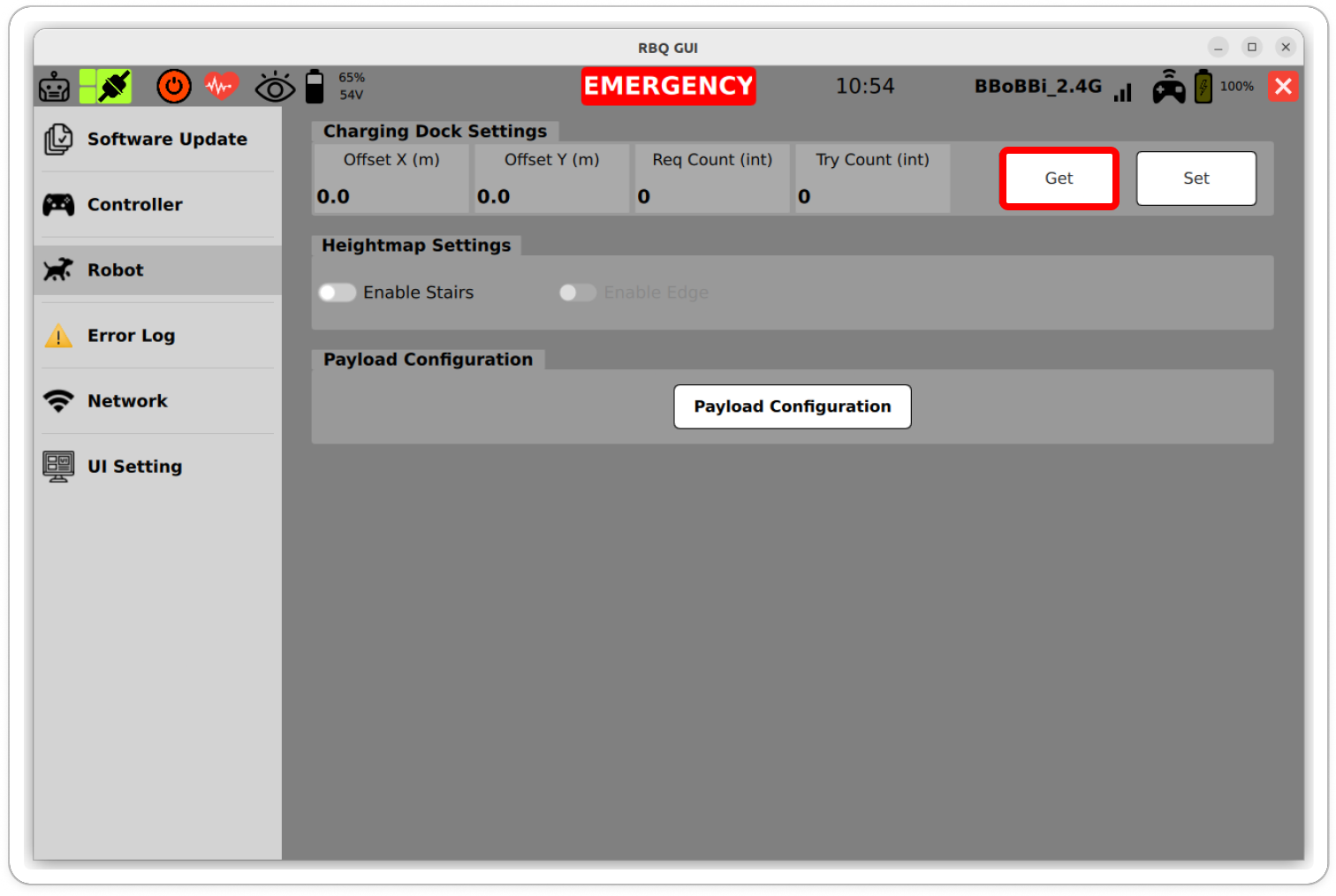
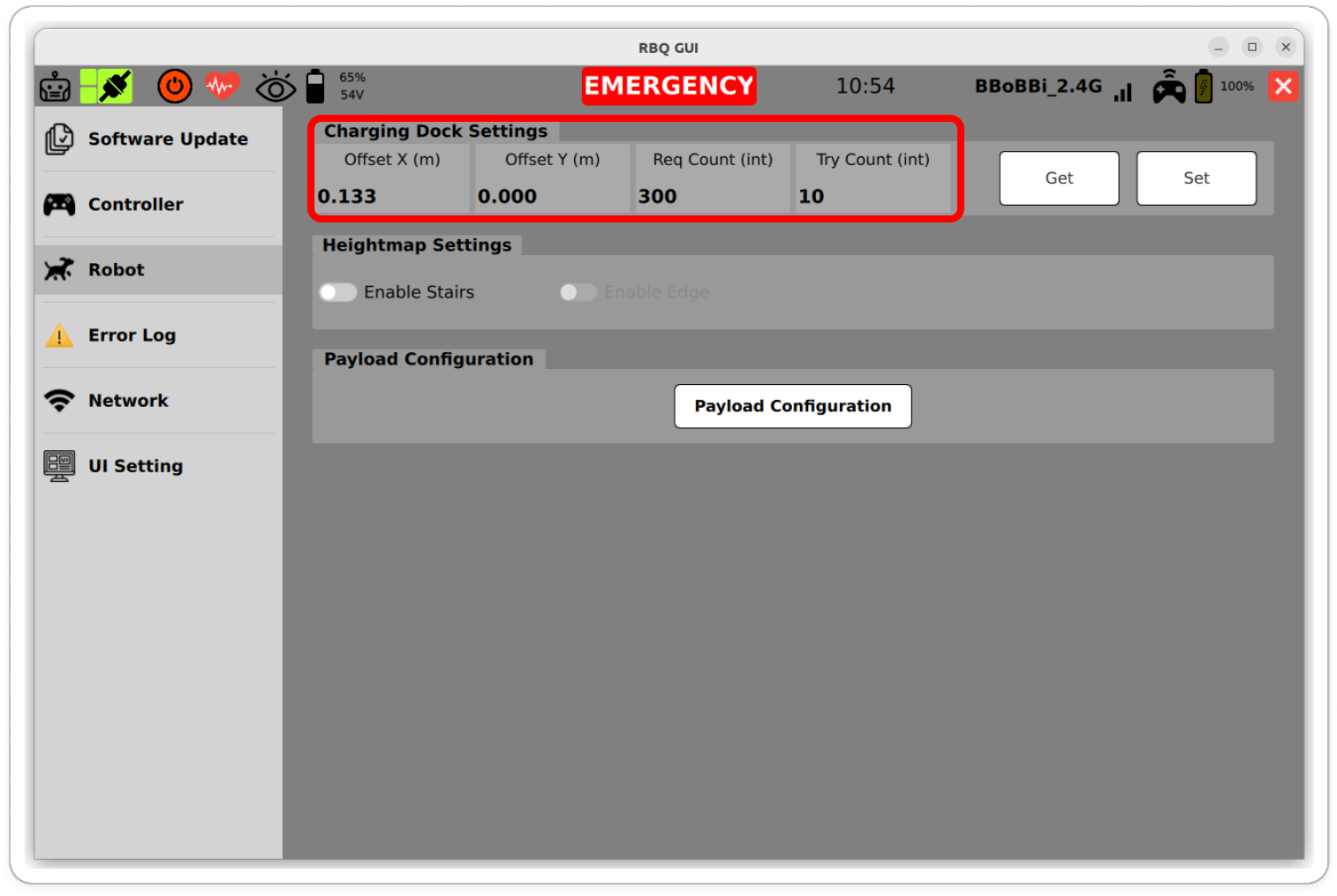
설정 → 로봇으로 이동한 뒤 Get을 눌러 현재 값을 불러옵니다.
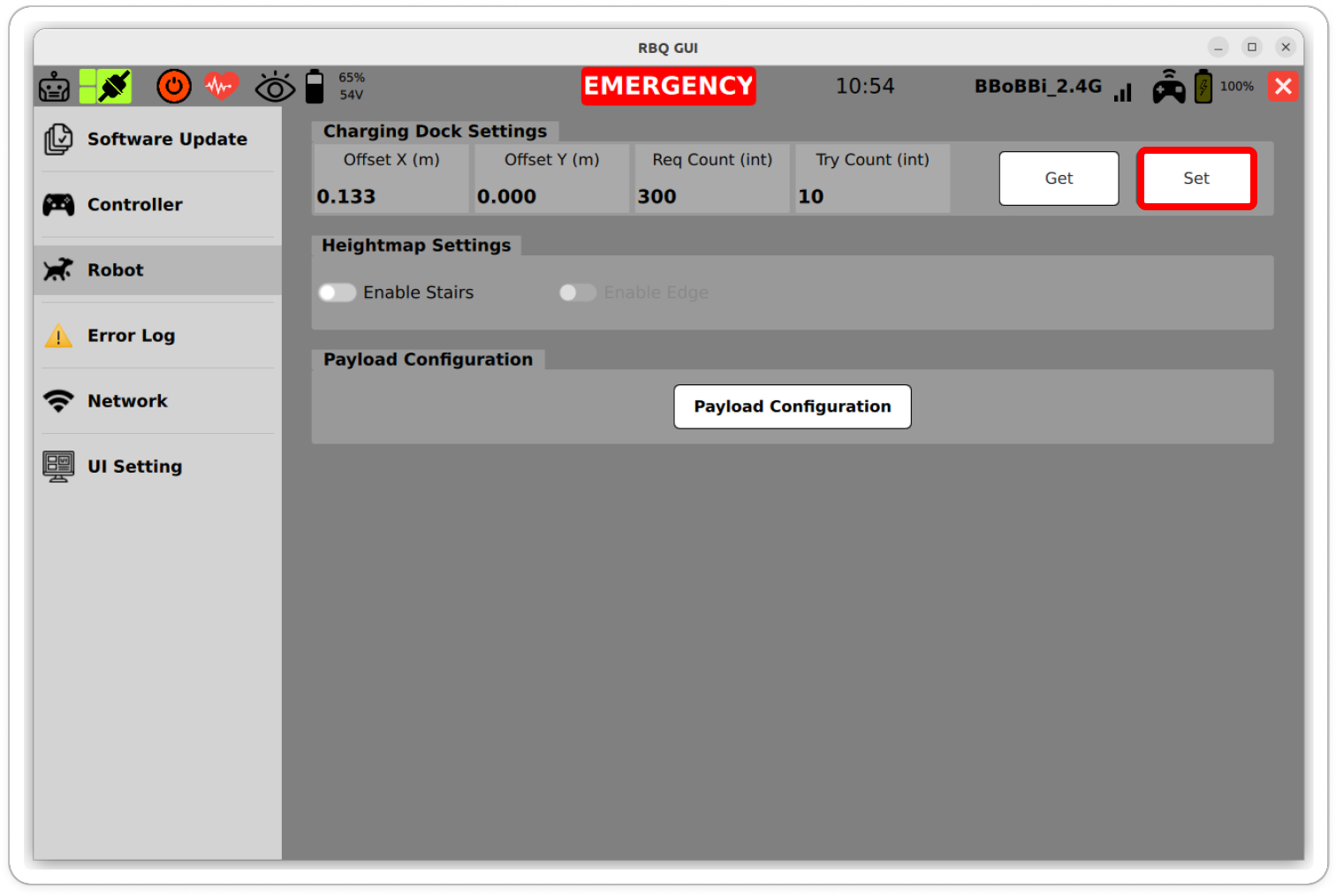
- 오차가 있는 항목의 파라미터를 수정한 뒤 Set을 눌러 반영합니다.
- 위 2~3번을 반복해 도킹이 안정될 때까지 조정합니다.
- 조정이 끝나면 평소처럼 도킹 기능을 사용하면 됩니다.
수정 가능한 파라미터
- Offset X (m): 로봇 기준 X 방향 위치 보정값입니다.
- Offset Y (m): 로봇 기준 Y 방향 위치 보정값입니다.
- Req Count (int): 마커(충전기) 포즈 요청 시, 유효한 응답이 없을 때 허용하는 누적 실패 횟수 상한입니다.
- Try Count (int): 도킹 시도가 실패했을 때의 재시도·허용 횟수와 관련된 값입니다.