기본 동작 명령
Sit 모드 (앉기)
로봇이 앉은 자세를 유지합니다. 조이스틱 조작은 동작하지 않습니다.
Stance 모드 (일어나기)
- 현재 앉아 있는 경우 → 일어섬
- 현재 Walk 또는 Stair 모드인 경우 → 정지 후 제자리에 서 있음
조이스틱 조작
| 🕹️ 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞 / 뒤 | 고개 위 / 아래 |
| L 스틱 | 좌 / 우 | 좌 / 우 롤 |
| R 스틱 | 앞 / 뒤 | 높이 올리기 / 내리기 |
| R 스틱 | 좌 / 우 | 좌 / 우 회전 |
Walk 모드 (보행)
조이스틱 조작
| 🕹️ 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞 / 뒤 | 전진 / 후진 |
| L 스틱 | 좌 / 우 | 좌 / 우 이동 |
| R 스틱 | 앞 / 뒤 | 피치 앞 / 뒤 |
| R 스틱 | 좌 / 우 | 좌 / 우 회전 |
Stair 모드 (계단)
계단 모드에서는 로봇이 계단 경사에 맞추어 보행 속도를 조절하고 몸체를 기울입니다.
참고
계단 모드에서는
R 스틱 - 앞 / 뒤 조작키가 사용되지 않습니다.
조이스틱 조작
| 🕹️ 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞 / 뒤 | 전진 / 후진 |
| L 스틱 | 좌 / 우 | 좌 / 우 이동 |
| R 스틱 | 앞 / 뒤 | |
| R 스틱 | 좌 / 우 | 좌 / 우 회전 |
Docking 모드 (도킹)
이 모드에서는 로봇이 자율적으로 충전 스테이션에 정렬합니다.
🤖 도킹이 완료되면 로봇은 이동을 멈추고 충전을 시작합니다.
⚠️ 도킹 모드 중에는 로봇을 수동으로 이동하지 마세요.
도킹 스테이션이 올바르게 배치되어 있고 전원이 공급되는지 확인하세요.
RL (Vision Trot) 모드
이 모드에서는 로봇이 비전 기반 강화학습 정책을 사용하여 보행합니다. 탑재된 카메라 입력을 활용하여 지형에 동적으로 대응하도록 학습되어 있습니다.
불규칙한 지형이나 동적 장애물에 적합합니다.
수동 프로그래밍된 보행 모드와 비교하여 반응성이 다를 수 있습니다.
조이스틱 조작
| 🕹️ 조이스틱 | 입력 | 로봇 동작 |
|---|---|---|
| L 스틱 | 앞 / 뒤 | 전진 / 후진 |
| L 스틱 | 좌 / 우 | 좌 / 우 이동 |
| R 스틱 | 앞 / 뒤 | |
| R 스틱 | 좌 / 우 | 좌 / 우 회전 |
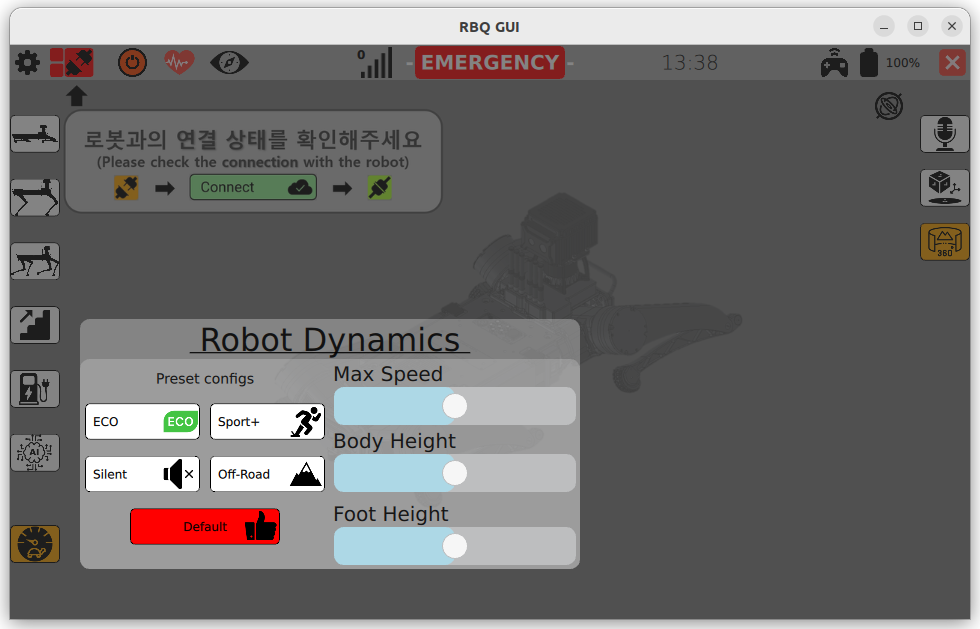
보행 파라미터 설정
로봇의 보행 동작을 실시간으로 조정할 수 있습니다.
GUI를 통해 보행 동작을 세밀하게 조정할 수 있습니다:
최대 명령 속도 - 로봇의 최대 보행 속도를 제한합니다
몸체 높이 - 수직 자세를 조정하여 여유 공간을 확보합니다
발 높이 - 스윙 단계에서 발이 들어올려지는 높이를 제어합니다