물리적 파라미터
Joint Coordinates & Offset
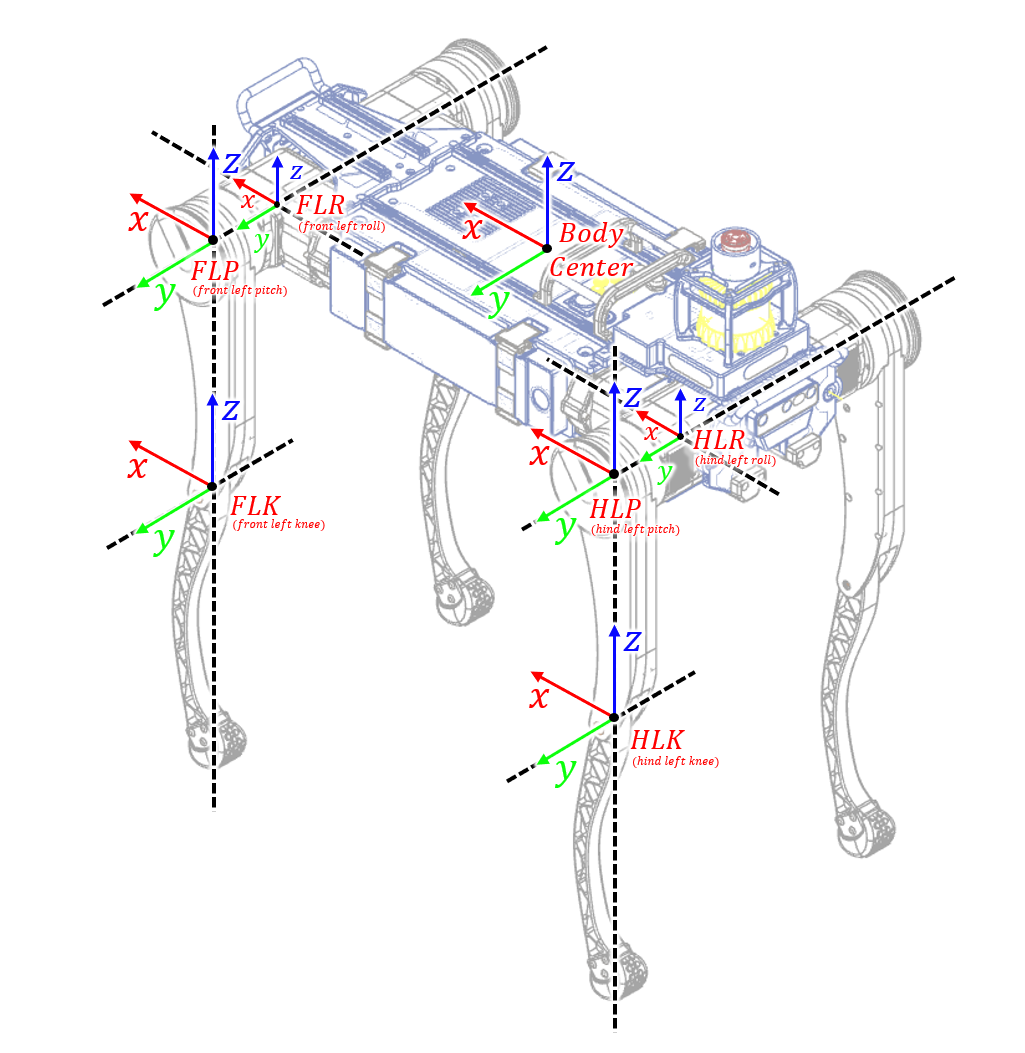
Joint Structure
| # | Joint | Parent Link | Child Link | Rev Axis | TF (x, y, z) |
|---|---|---|---|---|---|
| 0 | HRR | body link | HR_hip link | (1, 0, 0) | (-0.31218, -0.09, 0) |
| 1 | HRP | HR_hip link | HR_thigh link | (0, 1, 0) | (0, -0.10285, 0) |
| 2 | HRK | HR_thigh link | HR_calf link | (0, 1, 0) | (0, 0, -0.33) |
| HRF | HR_calf link | HR_foot link | fixed | (0, 0, -0.33) | |
| 3 | HLR | body link | HL_hip link | (1, 0, 0) | (-0.31218, 0.09, 0) |
| 4 | HLP | HL_hip link | HL_thigh link | (0, 1, 0) | (0, 0.10285, 0) |
| 5 | HLK | HL_thigh link | HL_calf link | (0, 1, 0) | (0, 0, -0.33) |
| HLF | HL_calf link | HL_foot link | fixed | (0, 0, -0.33) | |
| 6 | FRR | body link | FR_hip link | (1, 0, 0) | (0.31218, -0.09, 0) |
| 7 | FRP | FR_hip link | FR_thigh link | (0, 1, 0) | (0, -0.10285, 0) |
| 8 | FRK | FR_thigh link | FR_calf link | (0, 1, 0) | (0, 0, -0.33) |
| FRF | FR_calf link | FR_foot link | fixed | (0, 0, -0.33) | |
| 9 | FLR | body link | FL_hip link | (1, 0, 0) | (0.31218, 0.09, 0) |
| 10 | FLP | FL_hip link | FL_thigh link | (0, 1, 0) | (0, 0.10285, 0) |
| 11 | FLK | FL_thigh link | FL_calf link | (0, 1, 0) | (0, 0, -0.33) |
| FLF | FL_calf link | FL_foot link | fixed | (0, 0, -0.33) |
참고
Joint Naming
HRR : Hind Right Roll, HRP : Hind Right Pitch, HRK : Hind Right Knee
HLR : Hind Left Roll, HLP : Hind Left Pitch, HLK : Hind Left Knee
FRR : Front Right Roll, FRP : Front Right Pitch, FRK : Front Right Knee
FLR : Front Left Roll, FLP : Front Left Pitch, FLK : Front Left Knee
Link Mass & Inertia Parameter
Link Inertia Information
| Link Name | Mass (kg) | CoM (m) | Inertia Tensor (kg·m²) |
|---|---|---|---|
| body link | 16.758 | x : -0.013265 y : 0.0 z : 0.011765 | ixx="0.163831629266" ixy="-0.000271071491" iyy="0.590891341306" ixz="0.040352639311" iyz="0.000216428332" izz="0.678714788268" |
| HR_hip link | 3.669344 | x : 0.027522 y : -0.01681 z : -0.00187 | ixx="0.006957590282" ixy="-0.0017011378" iyy="0.00993982268" ixz="-0.000029676183" iyz="0.000087952172" izz="0.012145140245" |
| HR_thigh link | 1.80014 | x : -0.004765 y : -0.00441 z : -0.06311 | ixx="0.018990787558" ixy="0.000045769435" iyy="0.019770882672" ixz="-0.001024809563" iyz="0.000510504233" izz="0.001828257915" |
| HR_calf link | 0.4520 | x : 0.008988 y : 0.000072 z : -0.14911 | ixx="0.00214256" ixy="0.000000075939" iyy="0.00216568" ixz="0.0000230368745" iyz="0.000009344688" izz="0.0000616440919" |
| HR_foot | 0.06 | 0,0,0 | ixx="9.6e-06" ixy="0.0" ixz="0.0" iyy="9.6e-06" iyz="0.0" izz="9.6e-06" |
| HL_hip link | 3.669344 | x : 0.027522 y : 0.01681 z : -0.00187 | ixx="0.006957590282" ixy="0.0017011378" iyy="0.00993982268" ixz="-0.000029676183" iyz="-0.000087952172" izz="0.012145140245" |
| HL_thigh link | 1.80014 | x : -0.004765 y : 0.00441 z : -0.06311 | ixx="0.018990787558" ixy="-0.000045769435" iyy="0.019770882672" ixz="-0.001024809563" iyz="-0.000510504233" izz="0.001828257915" |
| HL_calf link | 0.4520 | x : 0.008988 y : -0.000072 z : -0.14911 | ixx="0.00214256" ixy="-0.000000075939" iyy="0.00216568" ixz="0.0000230368745" iyz="-0.000009344688" izz="0.0000616440919" |
| HL_foot | 0.06 | 0,0,0 | ixx="9.6e-06" ixy="0.0" ixz="0.0" iyy="9.6e-06" iyz="0.0" izz="9.6e-06" |
| FR_hip link | 3.669344 | x : -0.027522 y : -0.01681 z : -0.00187 | ixx="0.006957590282" ixy="0.0017011378" iyy="0.00993982268" ixz="0.000029676183" iyz="0.000087952172" izz="0.012145140245" |
| FR_thigh link | 1.80014 | x : -0.004765 y : -0.00441 z : -0.06311 | ixx="0.018990787558" ixy="0.000045769435" iyy="0.019770882672" ixz="-0.001024809563" iyz="0.000510504233" izz="0.001828257915" |
| FR_calf link | 0.4520 | x : 0.008988 y : 0.000072 z : -0.14911 | ixx="0.00214256" ixy="0.000000075939" iyy="0.00216568" ixz="0.0000230368745" iyz="0.000009344688" izz="0.0000616440919" |
| FR_foot | 0.06 | 0,0,0 | ixx="9.6e-06" ixy="0.0" ixz="0.0" iyy="9.6e-06" iyz="0.0" izz="9.6e-06" |
| FL_hip link | 3.669344 | x : -0.027522 y : 0.01681 z : -0.00187 | ixx="0.006957590282" ixy="-0.0017011378" iyy="0.00993982268" ixz="0.000029676183" iyz="-0.000087952172" izz="0.012145140245" |
| FL_thigh link | 1.80014 | x : -0.004765 y : 0.00441 z : -0.06311 | ixx="0.018990787558" ixy="-0.000045769435" iyy="0.019770882672" ixz="-0.001024809563" iyz="-0.000510504233" izz="0.001828257915" |
| FL_calf link | 0.4520 | x : 0.008988 y : -0.000072 z : -0.14911 | ixx="0.00214256" ixy="-0.000000075939" iyy="0.00216568" ixz="0.0000230368745" iyz="-0.000009344688" izz="0.0000616440919" |
| FL_foot | 0.06 | 0,0,0 | ixx="9.6e-06" ixy="0.0" ixz="0.0" iyy="9.6e-06" iyz="0.0" izz="9.6e-06" |