캘리브레이션 & 튜닝
로봇의 보행 안정성과 성능을 위해 ZMP 캘리브레이션과 각종 튜닝을 앱에서 진행할 수 있습니다.
ZMP 캘리브레이션
ZMP(Zero Moment Point) 캘리브레이션은 로봇이 서 있을 때 지면 반력의 중심을 맞춰 주어 보행 시 균형을 잡기 위한 작업입니다.
사전 준비
- 로봇을 평평하고 단단한 바닥에 두세요.
- 주변에 장애물이 없도록 하세요.
- RBQGUI 앱이 로봇에 연결된 상태여야 합니다.
진행 순서
- RBQGUI 앱을 실행한 뒤 로봇에 연결합니다.
- 로봇을 Stance(서기) 상태로 설정합니다.
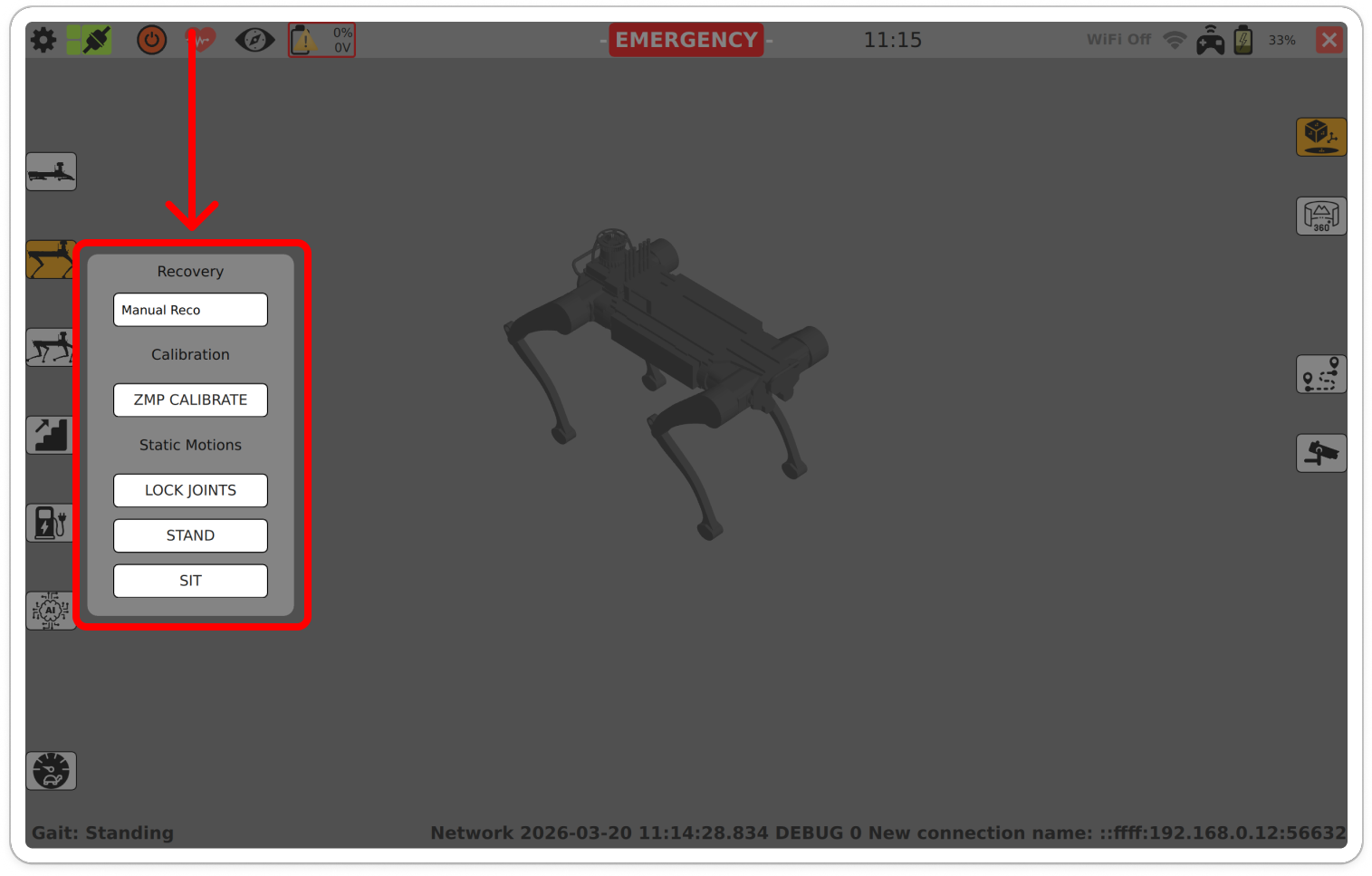
- Sit(앉기) 버튼을 길게 누릅니다.

- 화면의 메뉴에서 ZMP CALIBRATE 버튼을 선택합니다.
- 버튼이 주황색으로 바뀌면 캘리브레이션이 진행 중입니다.
- 캘리브레이션이 완료될 때까지 로봇을 건드리지 마세요.
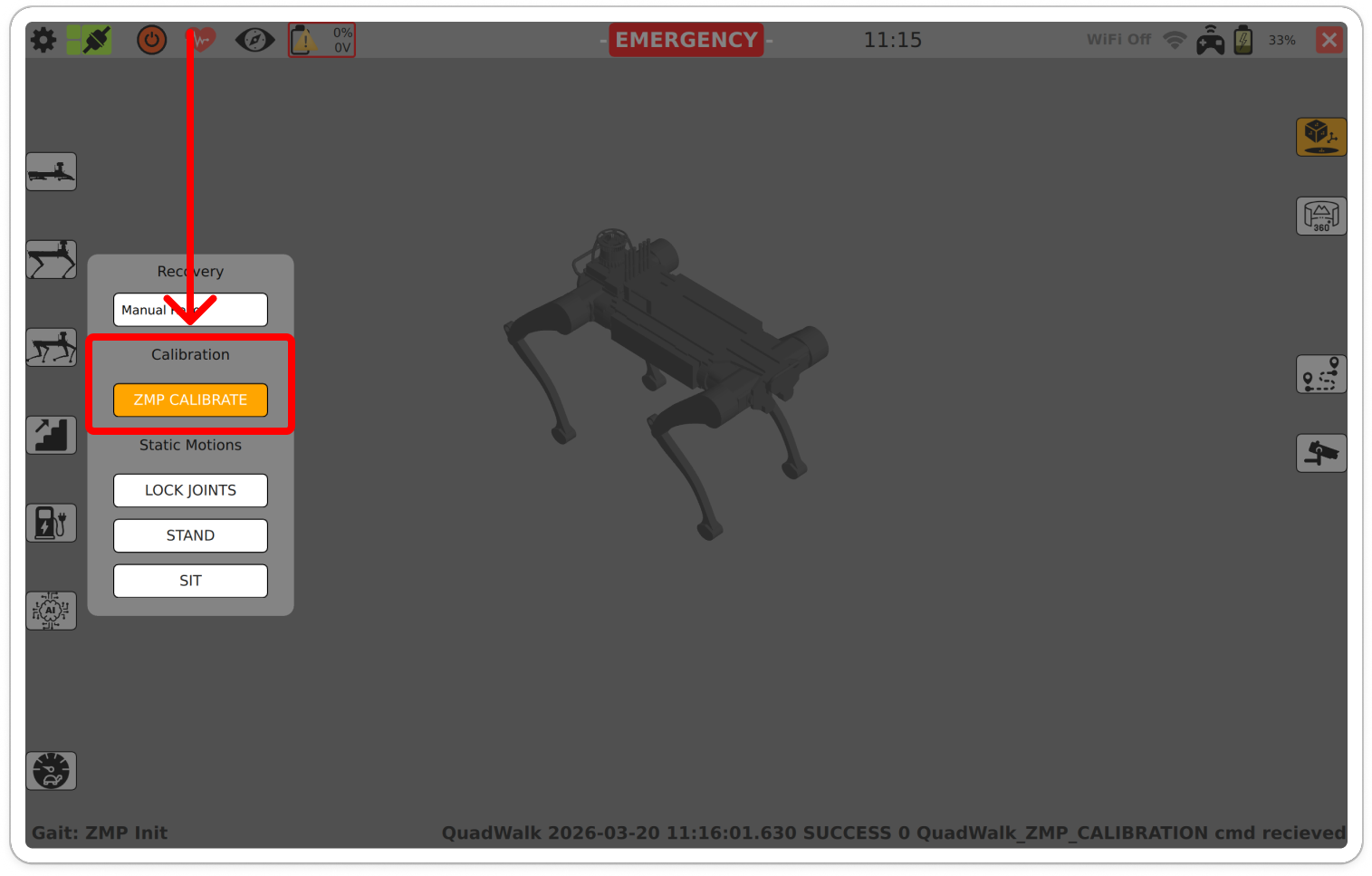
- 버튼이 흰색(기본색)으로 돌아가고 Gait: Stance로 바뀌면 캘리브레이션이 완료된 것입니다.
- 로봇을 움직여 보며 동작이 정상인지 확인합니다.
주의
캘리브레이션 중에는 로봇 위에 물건을 올리거나 로봇을 밀지 마세요. 캘리브레이션이 실패하면 다시 진행해야 할 수 있습니다.