D.H. Parameters v1.1
Denavit Hartenberg (DH) Parameters
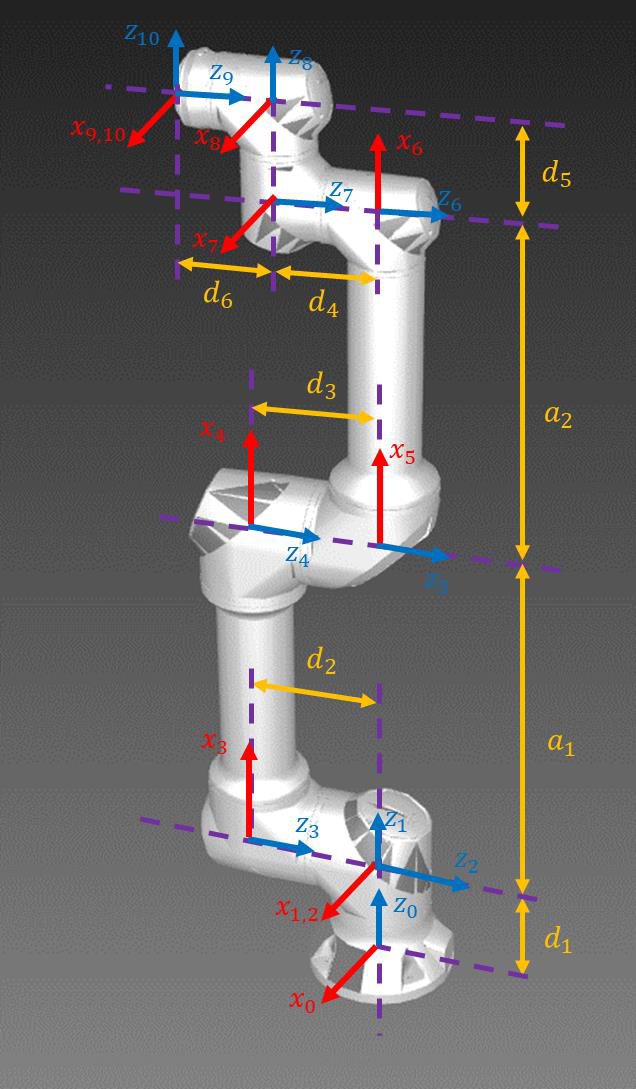
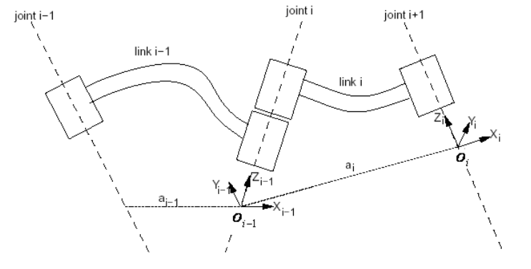
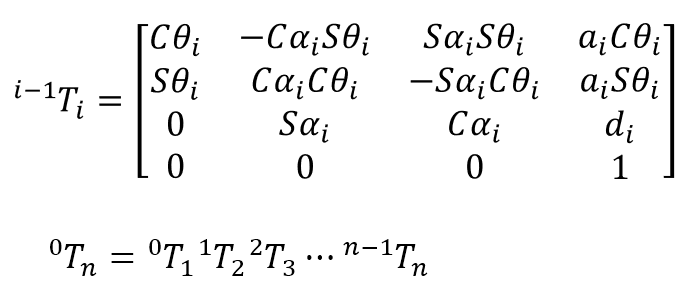
1. Standard D-H Parameter
- A rotation 𝜃𝑖 about 𝑧𝑖−1 axis
- A translation 𝑑𝑖 along the 𝑧𝑖−1 axis
- A translation 𝑎𝑖 along the 𝑥𝑖−1 axis
- A rotation 𝛼𝑖 about 𝑥𝑖−1 axis
| d1 | d2 | d3 | d4 | d5 | d6 | a1 | a2 | |
|---|---|---|---|---|---|---|---|---|
| RB5-850 | 169.2 | 148.4 | 148.4 | 110.7 | 110.7 | 96.7 | 425.0 | 392.0 |
| RB3-1200 | 169.2 | 148.4 | 148.4 | 110.7 | 110.7 | 96.7 | 566.9 | 522.4 |
| RB10-1300 | 197.0 | 187.5 | 148.4 | 117.15 | 117.15 | 115.3 | 612.7 | 570.15 |
| Standard(Spong) | ||||
|---|---|---|---|---|
| link i | θi | di | ai | αi |
| L1 | θ1 | d1 | 0 | -90 |
| L2 | θ2 - 90 | -d2 | 0 | 0 |
| L3 | 0 | 0 | a1 | 0 |
| L4 | θ3 | d3 | 0 | 0 |
| L5 | 0 | 0 | a2 | 0 |
| L6 | θ4 + 90 | -d4 | 0 | 0 |
| L7 | 0 | 0 | 0 | 90 |
| L8 | θ5 | d5 | 0 | -90 |
| L9 | θ6 | -d6 | 0 | 90 |
2. Modified D-H Parameter

- A rotation 𝛼𝑖−1 about 𝑥𝑖−1 axis
- A translation 𝑎𝑖−1 along the 𝑥𝑖−1 axis
- A rotation 𝜃𝑖 about 𝑧𝑖 axis
- A translation 𝑑𝑖 along the 𝑧𝑖 axis
| d1 | d2 | d3 | d4 | d5 | d6 | a1 | a2 | |
|---|---|---|---|---|---|---|---|---|
| RB5-850 | 169.2 | 148.4 | 148.4 | 110.7 | 110.7 | 96.7 | 425.0 | 392.0 |
| RB3-1200 | 169.2 | 148.4 | 148.4 | 110.7 | 110.7 | 96.7 | 566.9 | 522.4 |
| RB10-1300 | 197.0 | 187.5 | 148.4 | 117.15 | 117.15 | 115.3 | 612.7 | 570.15 |
| Modified(Craig) | ||||
|---|---|---|---|---|
| link i | θi | di | a(i-1) | α(i-1) |
| L1 | θ1 | d1 | 0 | 0 |
| L2 | 0 | 0 | 0 | -90 |
| L3 | θ2 - 90 | -d2 | 0 | 0 |
| L4 | 0 | 0 | a1 | 0 |
| L5 | θ3 | d3 | 0 | 0 |
| L6 | 0 | 0 | a2 | 0 |
| L7 | θ4 + 90 | -d4 | 0 | 0 |
| L8 | θ5 | d5 | 0 | 90 |
| L9 | θ6 | -d6 | 0 | -90 |
| L10 | 0 | 0 | 0 | 90 |
3. Standard D-H Parameter For S-pipe Type
- A rotation 𝜃𝑖 about 𝑧𝑖−1 axis
- A translation 𝑑𝑖 along the 𝑧𝑖−1 axis
- A translation 𝑎𝑖 along the 𝑥𝑖−1 axis
- A rotation 𝛼𝑖 about 𝑥𝑖−1 axis
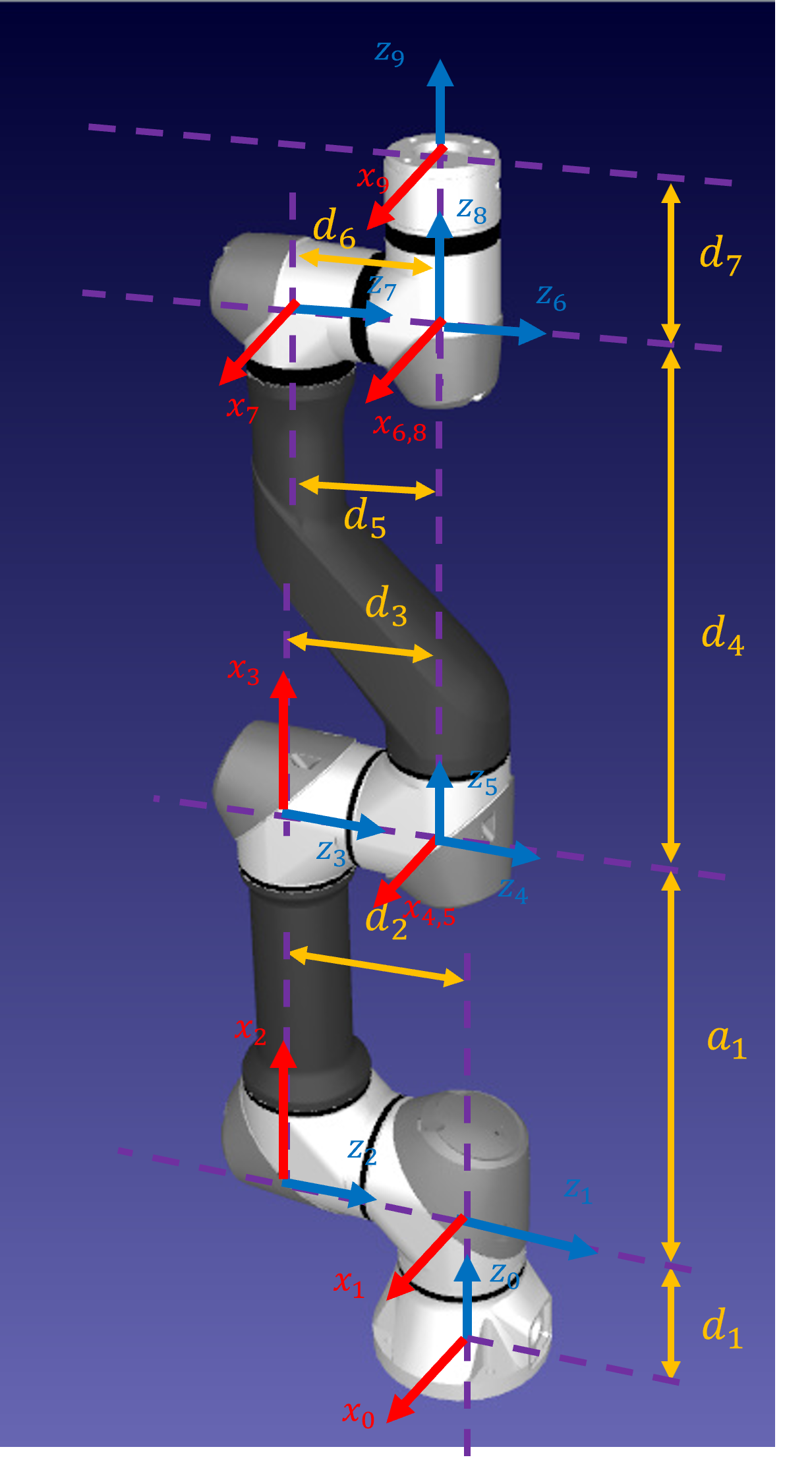
| Standard(Spong) | ||||
|---|---|---|---|---|
| link i | θi | di | ai | αi |
| L1 | θ1 | d1 | 0 | -90 |
| L2 | θ2 - 90 | -d2 | 0 | 0 |
| L3 | 0 | 0 | a1 | 0 |
| L4 | θ3 + 90 | d3 | 0 | 0 |
| L5 | 0 | 0 | 0 | 90 |
| L6 | θ4 | d4 | 0 | -90 |
| L7 | 0 | -d5 | 0 | 0 |
| L8 | θ5 | d6 | 0 | 90 |
| L9 | θ6 | d7 | 0 | 0 |