가상 로봇 제어박스 운용 v7.2
1. 버추얼박스 플랫폼 설치하기
사용자 PC에 버추얼 박스 프로그램 설치하기
(1) 다음 링크(https://www.virtualbox.org/wiki/Downloads)에서 Windows hosts 버튼을 클릭하여 설치파일을 다운로드 합니다.
가상 로봇 제어박스 프로그램을 운용하기 위해서는 가상 리눅스 시스템이 요구되기 때문에, 위와 같은 프로그램을 설치해야 합니다.
(2) 별도의 추가 설정 없이 Next/Yes 버튼을 통해 이 프로그램을 설치합니다.
(3) 설치가 완료되면 프로그램을 실행합니다.
2. 시뮬레이터 프로그램 설치 및 실행하기
버추얼박스를 통해 시뮬레리터 실행하기
(1) 도구 → 네트워크 설정으로 진입합니다.
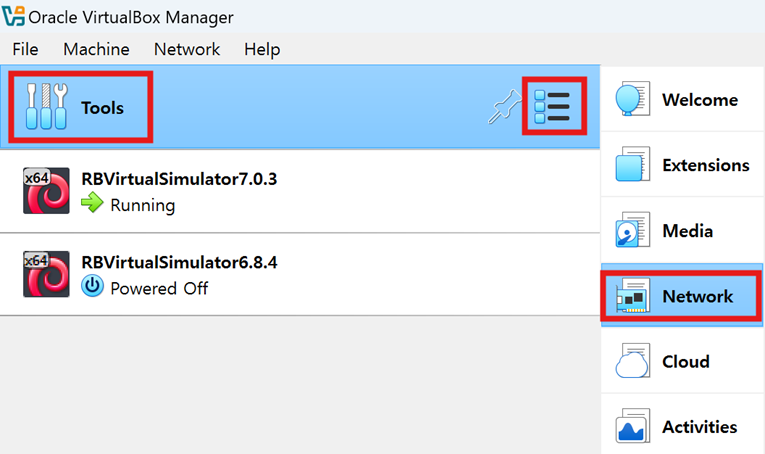
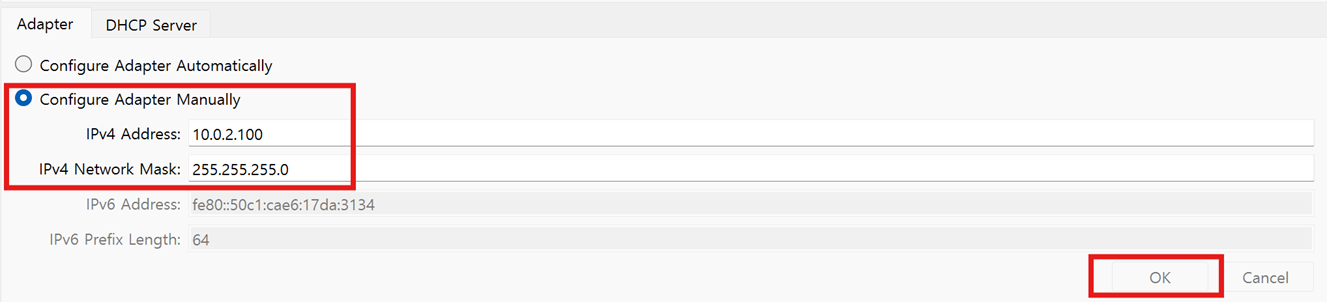
(2) 도구(Tool) -> 네트워크(Network) 하단 어댑터(Adaper)에 네트워크 주소를 다음과 같이 설정합니다. 예를 들어 ‘10.0.2.100’을 입력합니다. 만약 10.0.2.100 대역대의 IP 주소를 사용 하고 계신다면 겹치지 않은 다른 대역대의 IP를 설정 해주셔도 무방합니다. 작성 이후 하단의 ‘OK’ (확인) 버튼을 눌러야 합니다.
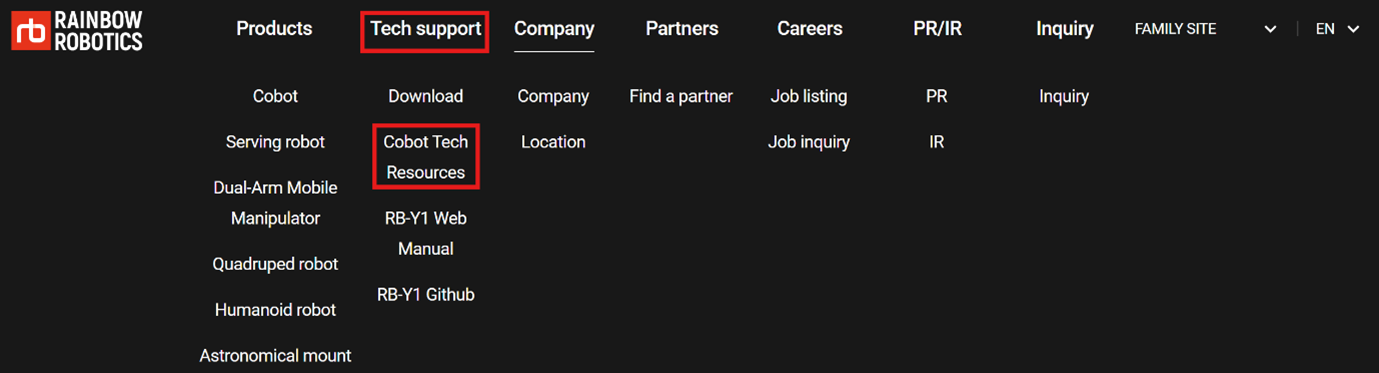
(3) RainbowRobotics 공식홈페이지에서 기술지원-> 협동로봇 기술자료를 클릭합니다.
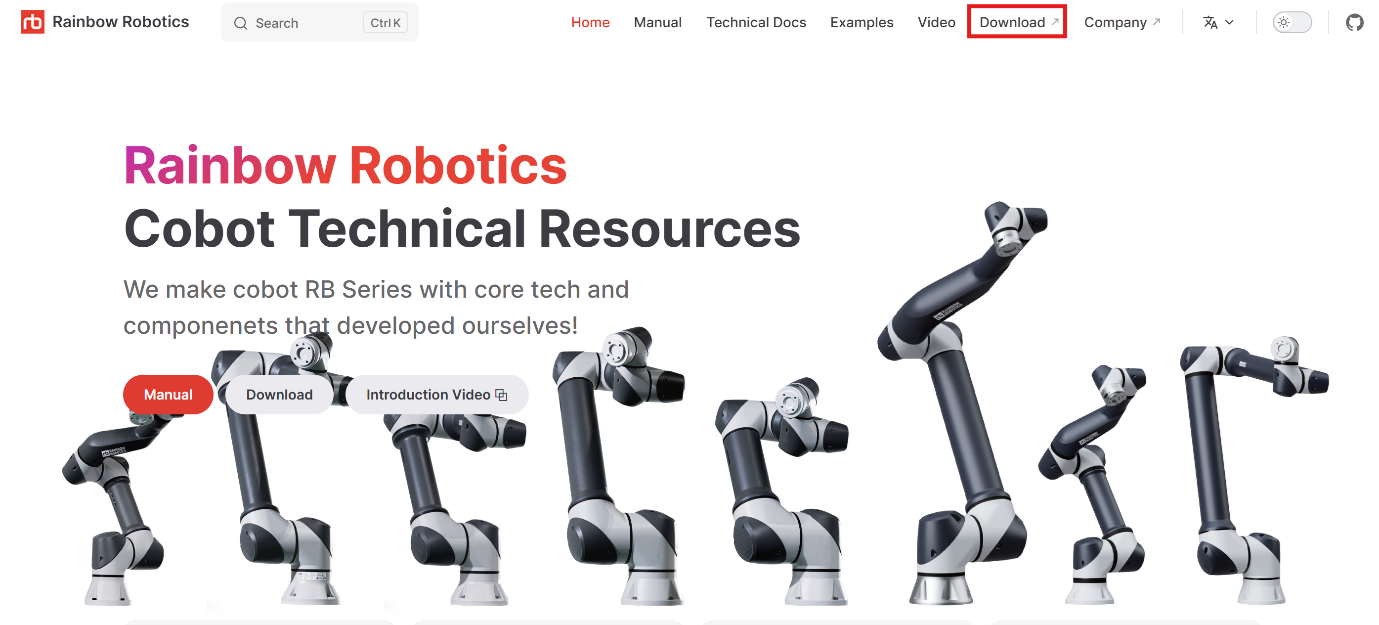
(4) RainbowRobotics 협동로봇 기술자료실의 상단 다운로드탭을 클릭합니다.
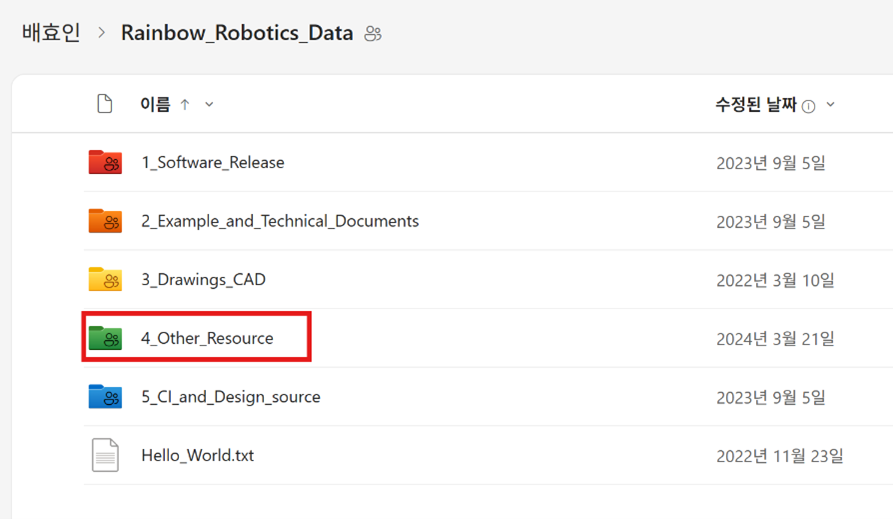
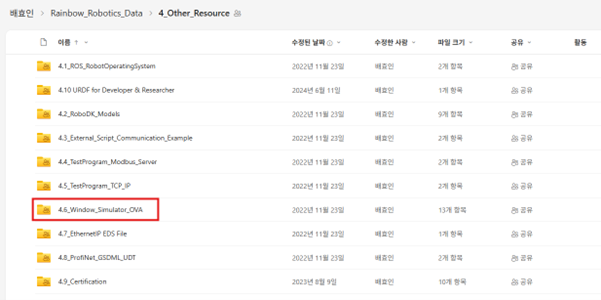
(5) 다운로드탭을 클릭하시면 새로운 창으로 One Drive 페이지가 열립니다. 아래 첨부된 사진과 같이 [4_Other_Resource] 폴더로 이동해주세요.
(6) [4_Other_Resource] – [4.6_Window_Simulator_OVA] 의 최신 버전 시뮬레이터를 다운받아주세요.
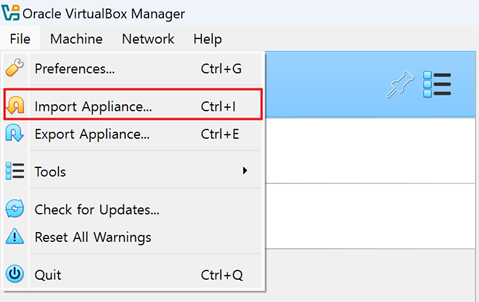
(7) 다시 버추얼박스로 돌아가서, 파일 – 가상 시스템 가져오기를 합니다.
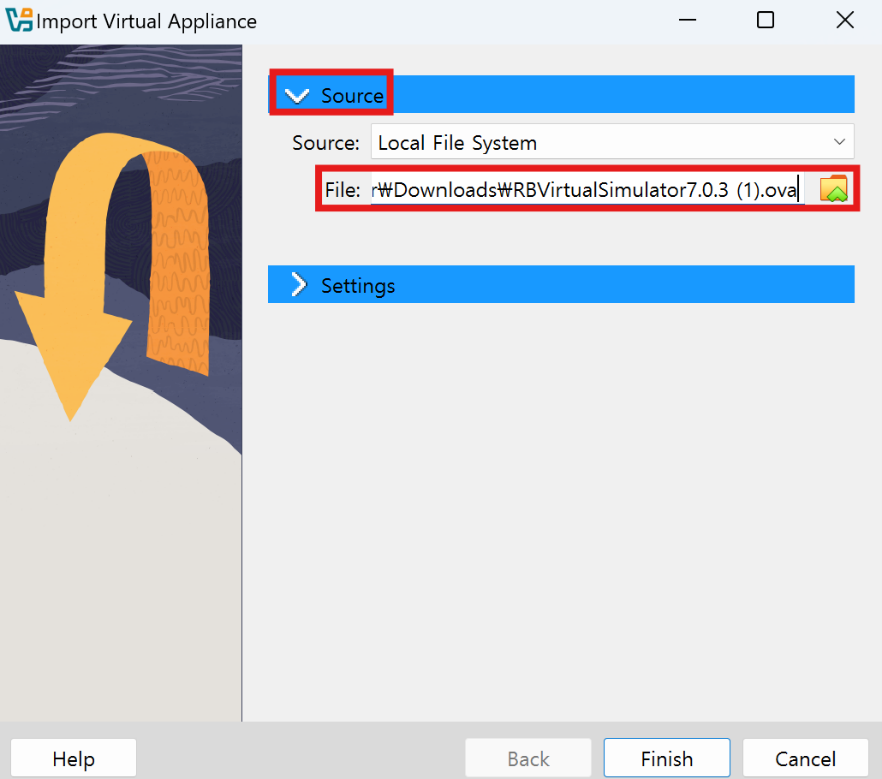
(8) (6)번에서 다운로드 된 RBVirtualSimulator.ova를 불러옵니다.
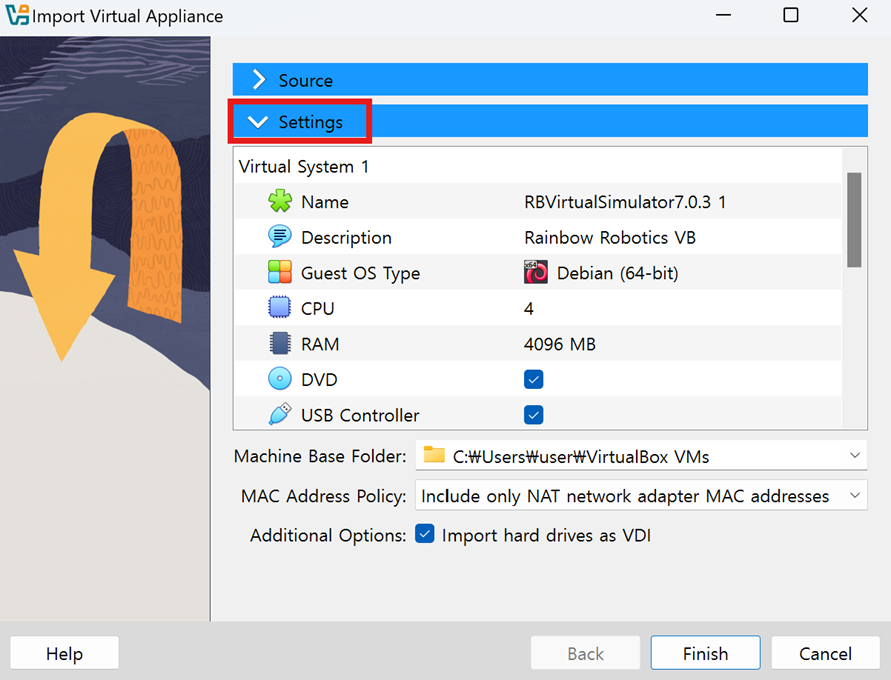
(9) 하단의 설정 부분에서 아래 사진과 같이 되어있는지 확인하고 하단의 완료를 클릭합니다.
(10) 우측에 가상시스템이 추가가 완료되면, 좌측에 RBVirtualSimulator가 등록됩니다.
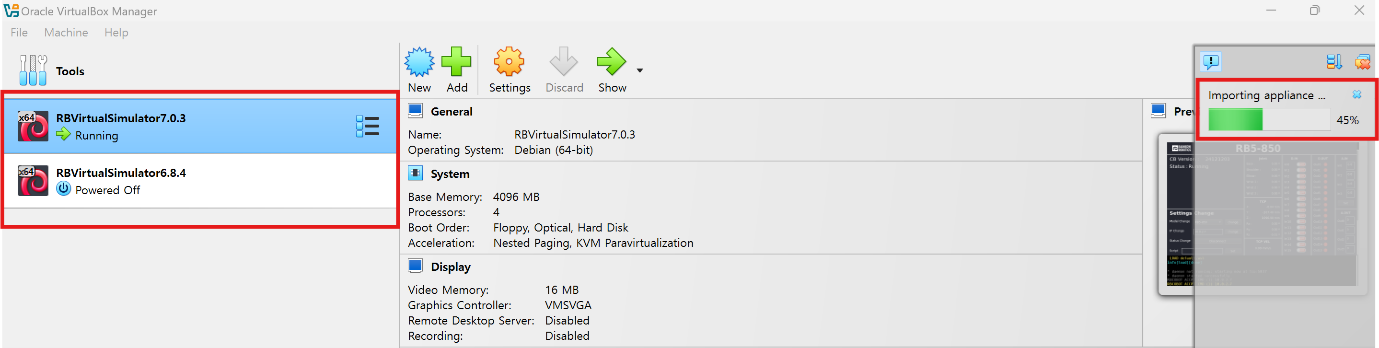
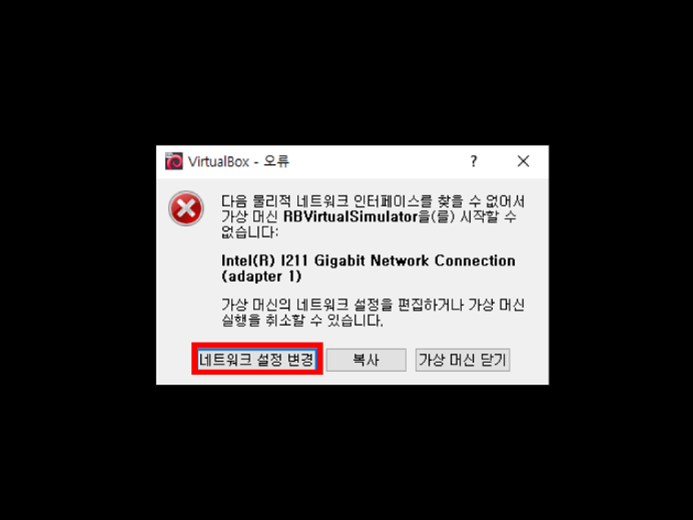
(11) 실행 시 만약 다음과 같은 에러가 발생한다면, 네트워크 설정 변경 버튼을 클릭합니다.
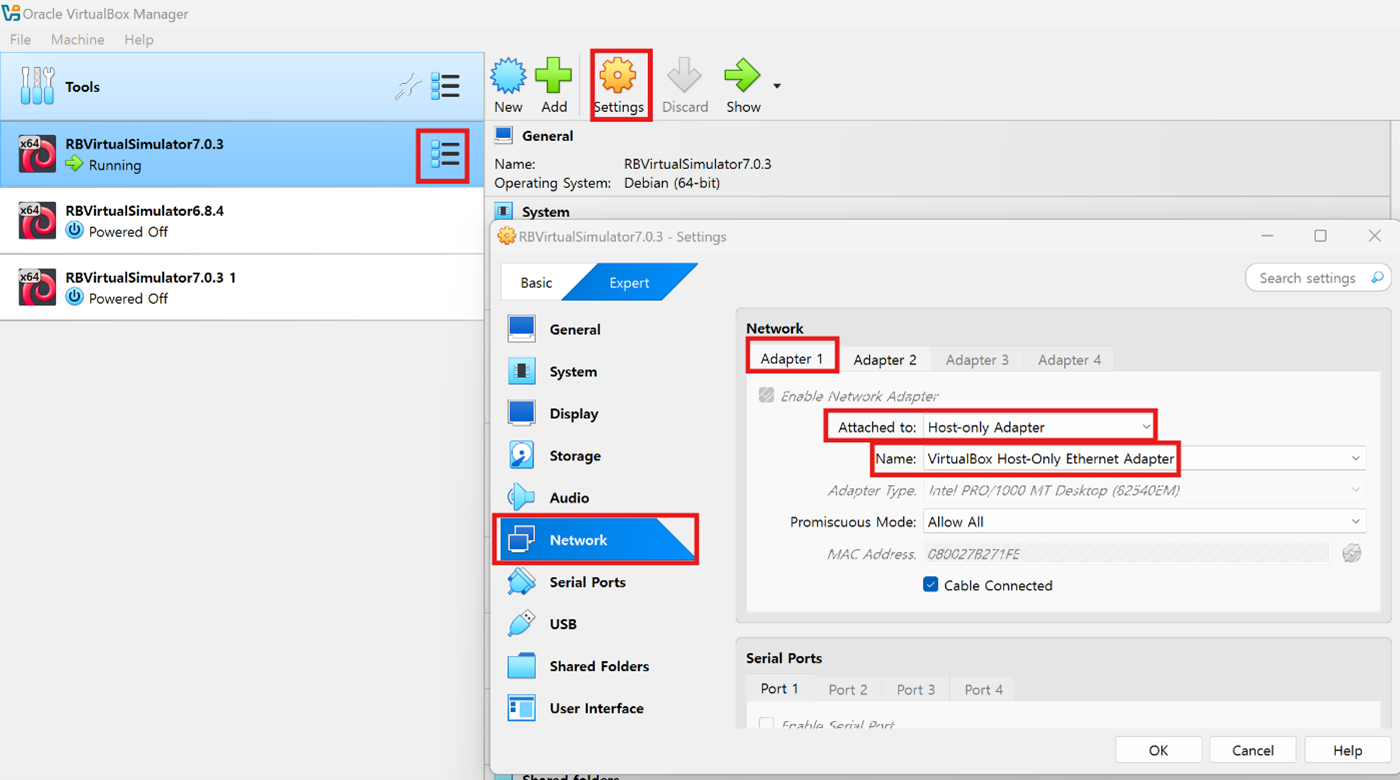
(12) 좌측의 RBVirtualSimulator를 클릭해주시고 상단 설정 클릭 후, 네트워크를 클릭합니다. 어댑터1의 “다음에 연결됨: ” 에 ‘호스트 전용 어댑터’, 를 넣어주시고, 아래 칸 “이름:” 에 ‘VirtualBox- Host-Only Ethernet Adapter’ 로 설정한 후, 하단의 확인을 클릭합니다.
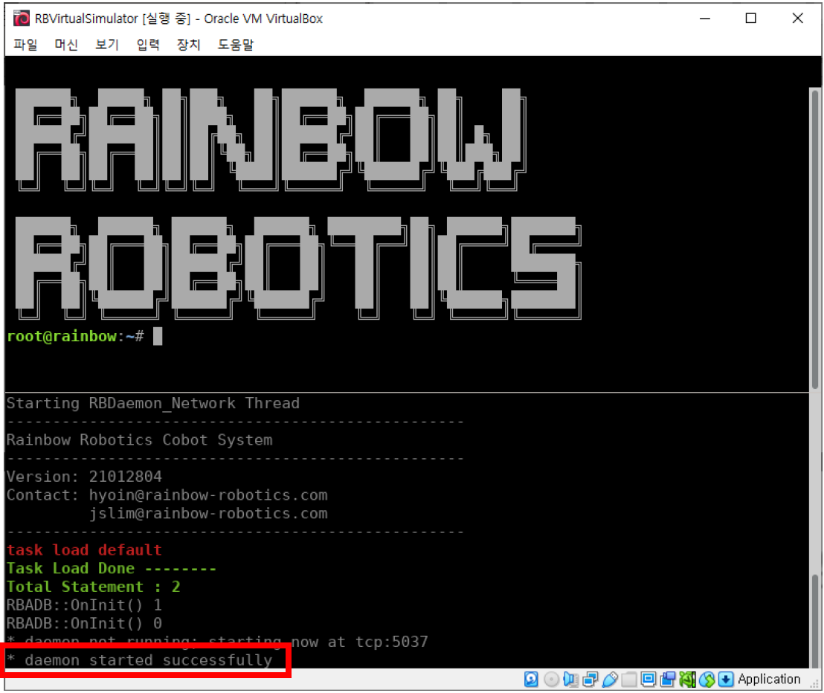
(13) 설정을 완료 후 다시 RBVirtualSimulator를 실행시키면 정상적으로 가상 제어박스가 부팅되는 것을 확인할 수 있습니다. 다음 화면에서 아래의 * daemon started successfully 라는 메시지가 나올 때까지 기다립니다.
3. RB 가상제어박스 - RB WindowUI 설치 및 실행하기
RB 가상제어박스-RB Window UI 프로그램 실행 및 연결
(1) RB 기술자료 Onedrive에서 RB_window_###(버전) 중 다운로드 되어진RB_window.exe를 실행합니다.
(2) RB Window UI 실행 후 네트워크 (  )버튼을 클릭합니다.
)버튼을 클릭합니다.
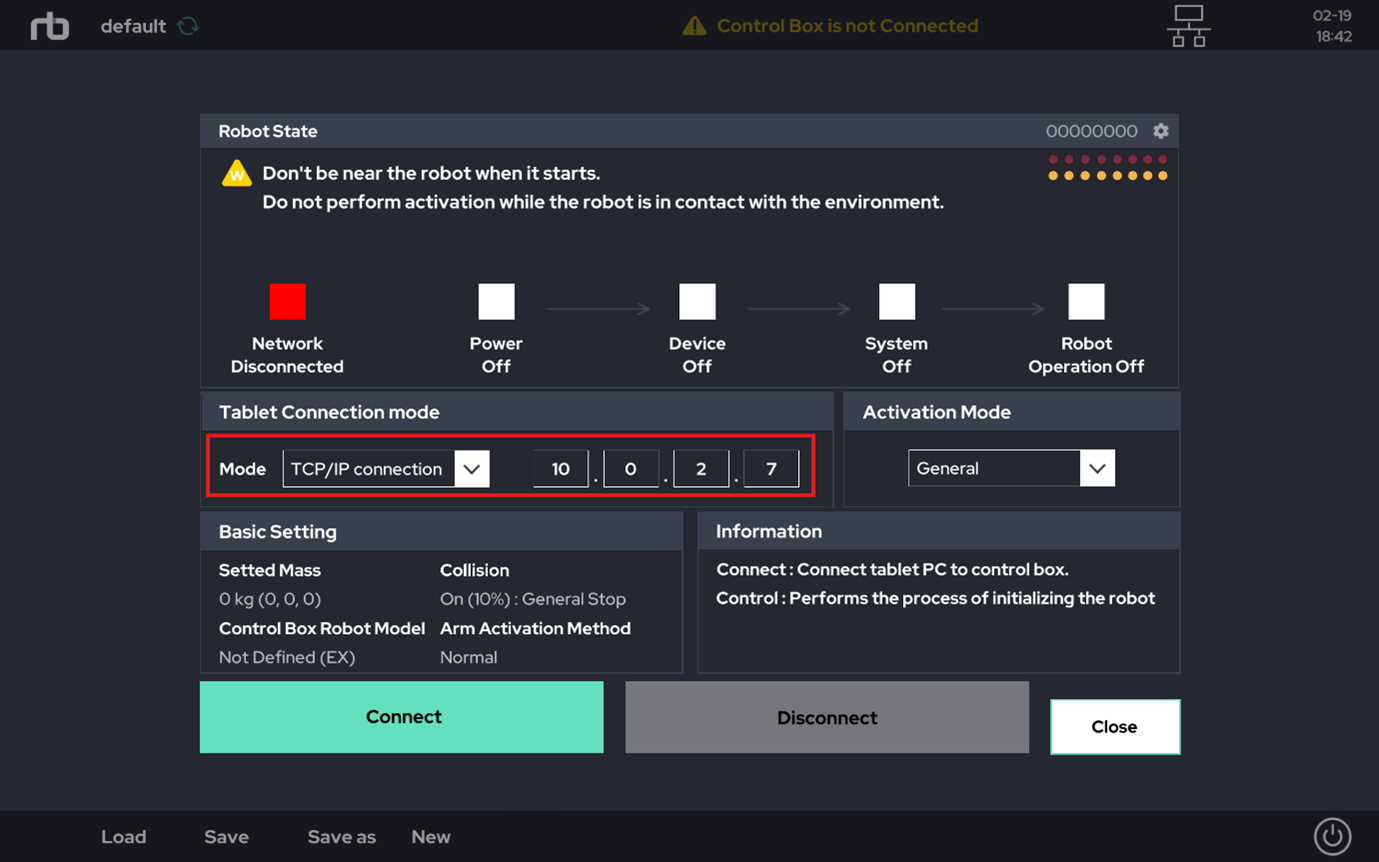
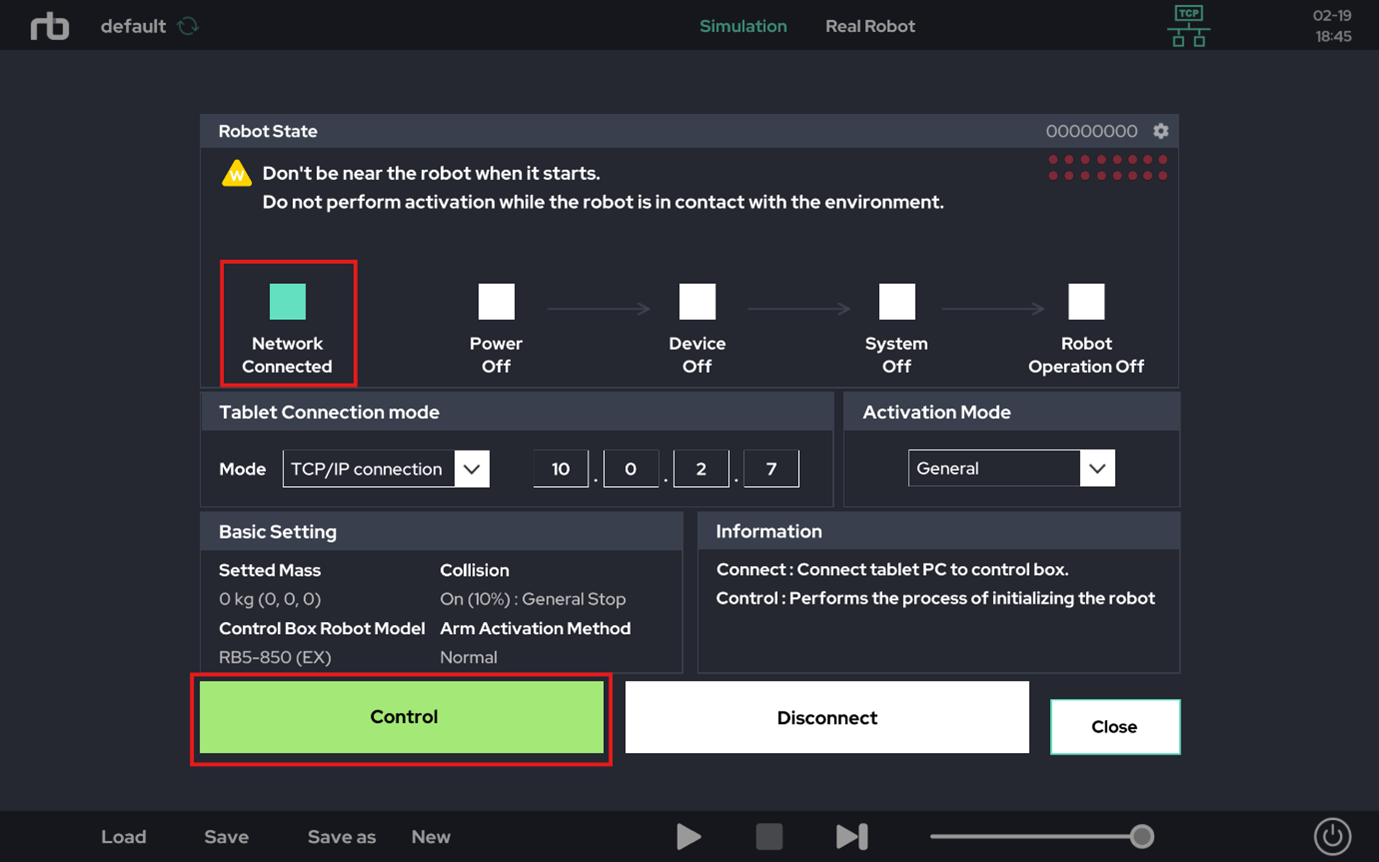
(3) 정상적으로 연결되었다면, 다음과 같이 네트워크 연결됨에 초록불이 들어옵니다.
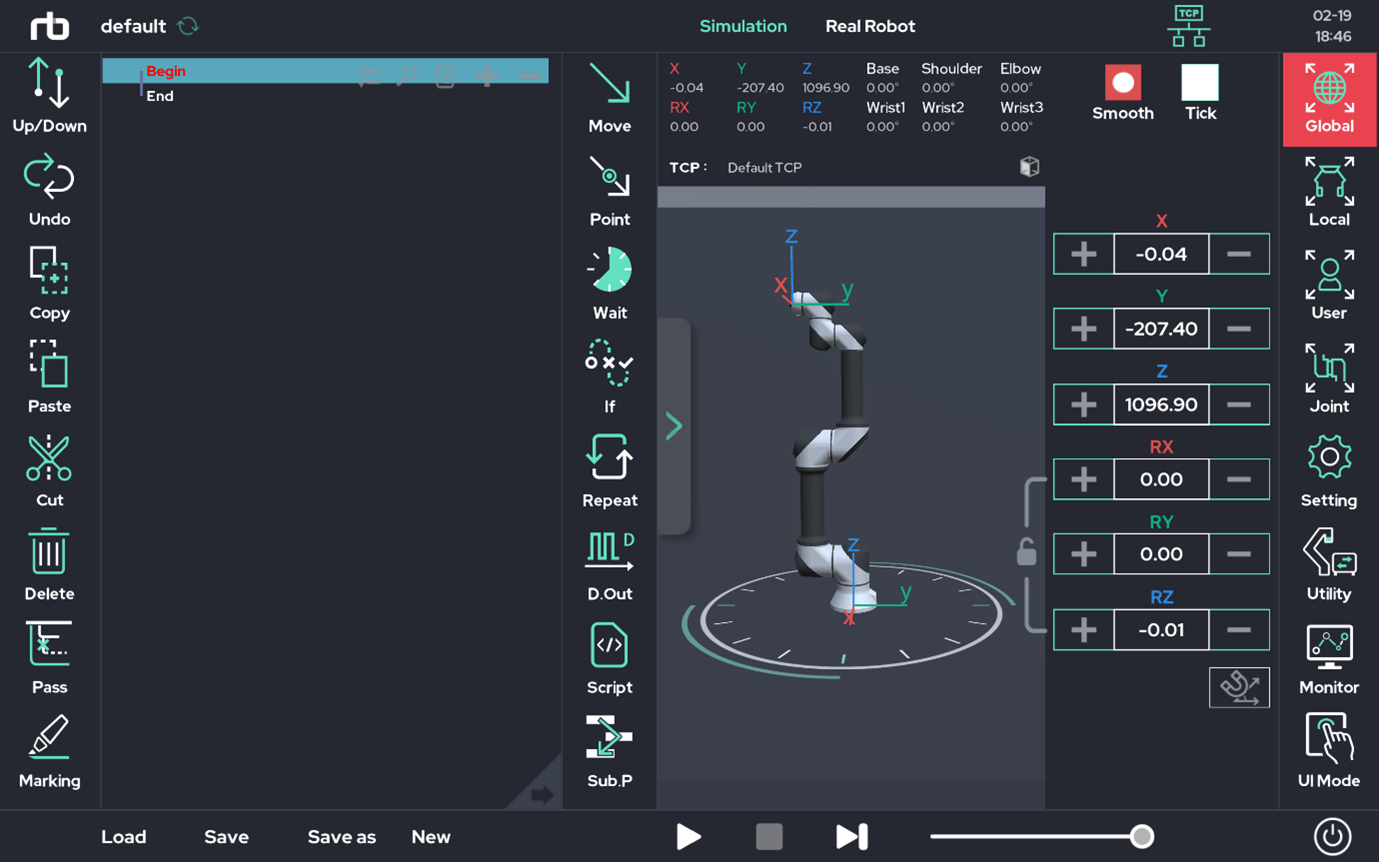
(4) 시뮬레이션 모드에서 원하는 로봇 자세를 테스트할 수 있습니다.
(가상 제어 박스이기 때문에 Real Robot 모드는 사용불가)
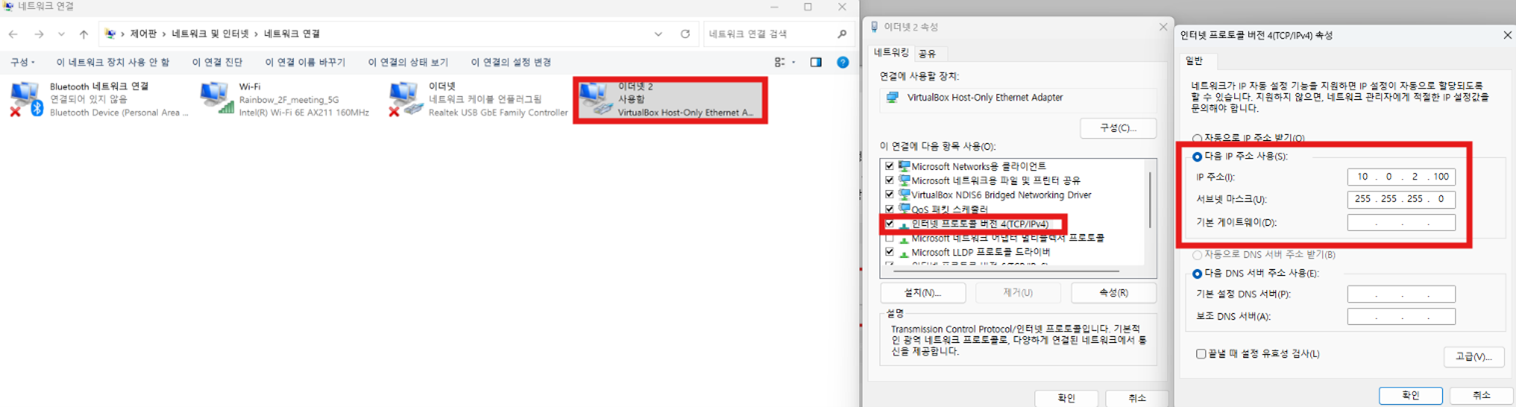
(5) 만약 RB Window UI가 가상제어박스와 연결되지 않는다면, 개인PC 네트워크의 ‘VirtualBox-Host-Only Ethernet Adapter’의 고정 할당된 IP 주소를 확인해주세요.