시작 사용자 가이드 v240227
가이드 내 안전표기
DANGER
이 표기가 있는 지침을 준수하지 않을 경우, 작업자 또는 사용자의 사망이나 중대한 부상으로 이어질 수 있는 심각한 사고가 발생할 수 있습니다.
WARNING
이 표기가 있는 지침을 준수하지 않을 경우, 작업자 또는 사용자에게 중대한 부상을 유발할 수 있는 사고가 발생할 수 있습니다.
CAUTION
이 표기가 있는 지침을 준수하지 않을 경우, 제품이 손상되거나 작업자 또는 사용자가 부상을 입을 수 있습니다.
일반 안전 경고 및 주의 사항
WARNING
- 로봇 응용 시스템 제조업체 또는 로봇 사용자는 본 가이드와 사용자 매뉴얼의 내용을 숙지하고, 반드시 작동 교육을 이수해야 합니다.
- 로봇 암이 자유롭게 움직일 수 있도록 충분한 공간을 확보해야 합니다.
- 로봇을 사용할 때에는 헐렁한 옷이나 액세서리를 착용하지 마십시오. 머리카락이 긴 경우, 로봇의 관절이나 기타 부위에 끼이지 않도록 반드시 묶어 주십시오.
- 손상된 로봇은 절대로 사용하지 마십시오.
- 소프트웨어에 치명적인 오류가 발생한 경우, 즉시 **비상 정지(E-Stop)**를 작동시키고 제품 공급업체 또는 Rainbow Robotics에 문의하십시오.
- 로봇 설치 각도, 툴 설정, 안전 지침 등의 값이 정확히 입력되었는지 반드시 확인하십시오.
- 안전 장비는 일반 I/O 포트에 연결하지 마십시오. 안전 장비는 반드시 안전 관련 I/O 포트에만 연결해야 합니다.
- 태블릿 PC로 로봇을 티칭할 때에는 로봇의 움직임에 주의하십시오.
- 로봇이 작동 중일 때에는 작동 범위 내에 들어가지 말고, 로봇을 손으로 만지지 마십시오.
- 로봇을 임의로 개조하거나 수정하지 마십시오. 제조사인 Rainbow Robotics는 사용자가 제품을 임의로 변경하거나 개조하여 발생하는 문제에 대해 책임지지 않습니다.
- 로봇 암과 컨트롤러는 장시간 사용 시 열이 발생합니다. 장시간 사용 후 로봇을 손으로 만지지 마십시오. 로봇을 만져야 할 경우, 컨트롤러 전원을 차단하고 충분히 냉각된 후 작업하십시오.
- 로봇이 외부 물체와 충돌할 경우, 속도와 페이로드에 비례하여 큰 충격이 발생합니다.
- 권장 설치 조건을 사용하고 있는지 확인하십시오. 로봇 암의 설치 방향, 툴의 무게, 무게 중심, 길이, 안전성 등을 정확히 입력하지 않으면, 직접 교시(Direct Teaching) 또는 충돌 감지 기능이 제대로 작동하지 않을 수 있습니다.
- 직접 교시 기능은 반드시 안전한 환경에서 사용해야 합니다. 툴이나 주변 고정물, 부품에 날카로운 부분이 있거나 끼임이 발생할 수 있는 경우에는 사용하지 마십시오.
- 직접 교시 기능을 사용하기 전에, 툴의 길이, 무게, 무게 중심 등 툴 관련 정보가 실제와 일치하도록 정확히 입력되어 있는지 확인하십시오. 잘못된 정보를 입력할 경우, 직접 교시 기능 사용 중 오작동이 발생할 수 있습니다.
- 직접 교시 기능 사용 중 일정 속도를 초과하여 조작할 경우, 사용자 안전을 위해 관절이 비상 정지될 수 있습니다.
- 로봇 암과 제어박스는 작동 중 열을 발생시킵니다. 작동 중이거나 작동 직후 로봇 암을 계속 접촉하면 오작동의 원인이 될 수 있으므로, 손으로 만지지 마십시오. 로봇 암을 조작하거나 만지기 전에는 UI 화면에서 온도를 확인하거나 로봇 전원을 차단한 후, 1시간 이상 충분히 냉각되었는지 확인하십시오.
CAUTION
- 로봇을 기계 또는 기타 로봇과 함께 사용하여 로봇에 손상이 발생할 가능성이 있는 경우, 모든 기능을 사전에 개별적으로 테스트한 후 사용하는 것을 권장합니다. 프로그래밍 오류 또는 로봇의 오작동으로 인해 다른 기계나 로봇에 손상이 발생하더라도, 제조사는 이에 대한 책임을 지지 않습니다.
- 로봇을 강한 자기장에 노출시키지 마십시오. (로봇이 손상될 수 있습니다.)
WARNING
- 감전 위험이 있는 전기 장치가 설치된 위치에는 경고 표지판을 부착하십시오.
- 표지판을 찢거나 훼손하거나 제거하지 마십시오.
- 표지판이 부착된 부품 또는 장치 및 그 주변 부품을 다룰 때에는 각별히 주의하십시오.
- 전기 부품 내부는 절대로 손으로 접촉하지 마십시오.
1. 구성요소소
로봇 및 시스템 구성 요소가 포함된 총 2개의 박스가 제공되며, 각 박스에 포함된 시스템 구성 요소는 다음과 같습니다.
- 로봇 팔
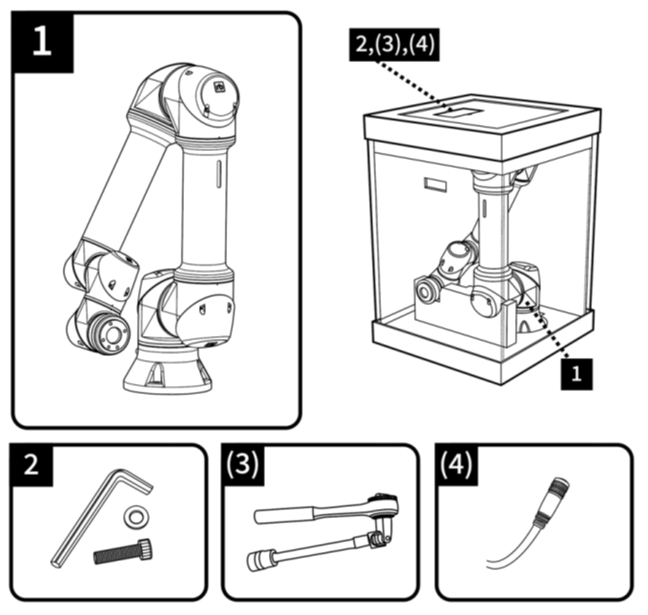
※ 괄호 ( )로 표시된 항목은 옵션 제품입니다.
| Robot | 1 | 로봇 팔 |
|---|---|---|
| Tool Box | 2 | 볼트, 와샤, 렌치 |
| (3) | ※ NSF 모델 전용 툴 – 베이스 고정용 툴 | |
| (4) | 툴 I/O 케이블 |
TIP
※ NSF 모델 전용 툴은 NSF 모델의 구성품에만 적용됩니다.
※ 구성품은 로봇의 사양에 따라 달라질 수 있습니다.
※ 본 매뉴얼에 사용된 제품 이미지는 이해를 돕기 위한 예시이며, 실제 제품과 다를 수 있습니다.
- 제어 박스
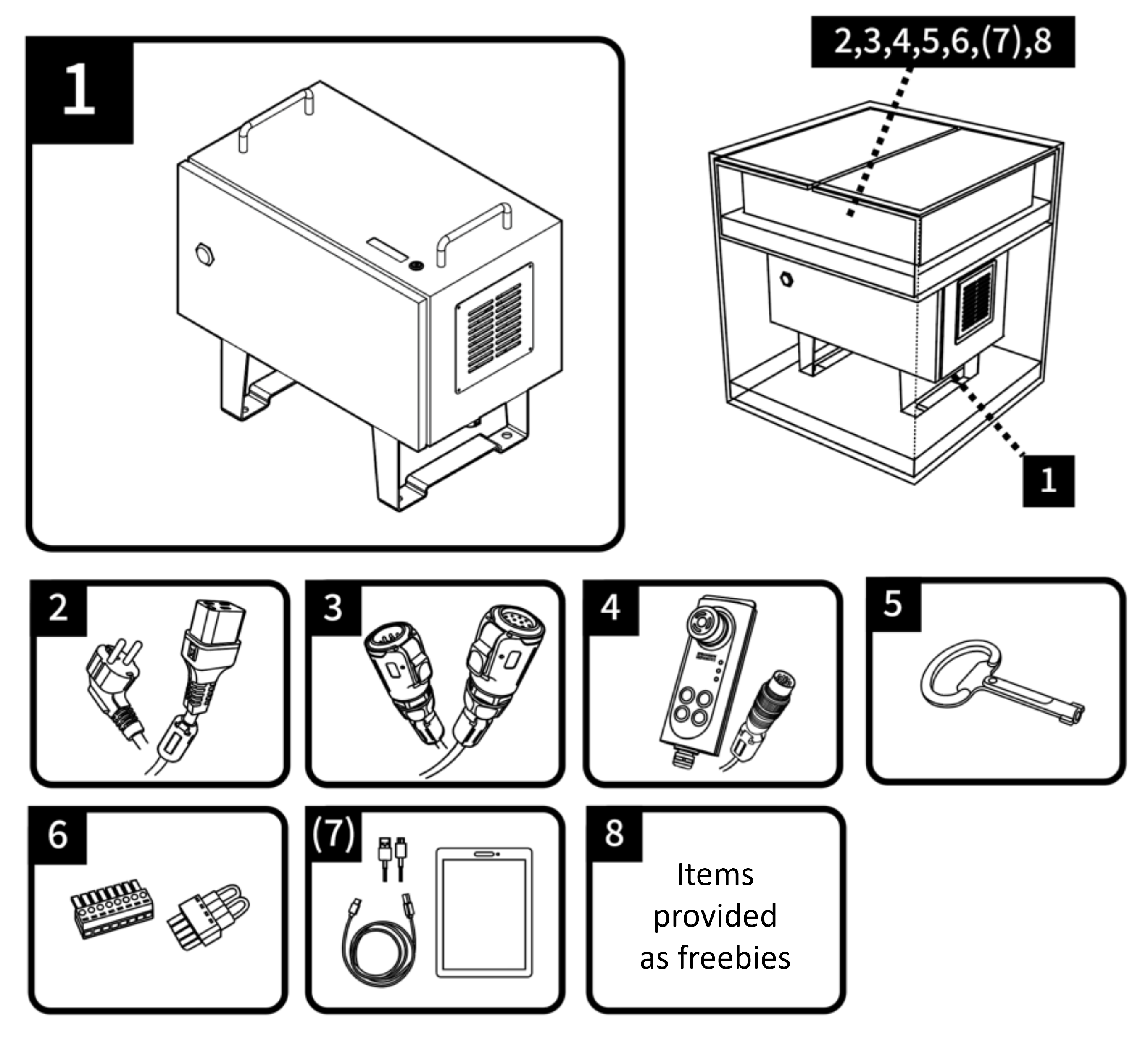
※ 괄호 ( )로 표시된 항목은 옵션 제품입니다.
| System Components | 1 | 제어 박스스 |
|---|---|---|
| Accessory Box | 2 | AC 전원 케이블 |
| 3 | 로봇 - 제어 박스 연결 케이블 | |
| 4 | 비상 정지/조그 인터페이스 | |
| 5 | 제어 박스 열쇠 (일부 모델에 해당됨됨) | |
| 6 | I/O 터미널 단자대 (여분), 휴즈 | |
| (7) | 태블릿, 짧은 USB 케이블, 긴 USB 케이블 | |
| 8 | 서비스 제공용 (예: USB, 외부 케이블 고정을 위한 벨크로 등) |
TIP
※ 위에 표시된 제어박스의 외형은 로봇의 사양에 따라 변경될 수 있습니다.
※ 전원 케이블 및 로봇 팔팔–제어박스 간 케이블은 제조사에서 제공하는 5m 케이블 사용을 권장합니다. 비상 정지/조그 인터페이스 케이블은 제조사에서 제공하는 3m 미만의 케이블 사용을 권장합니다.
※ 차폐 LAN 케이블, I/O 포트 연결 케이블, USB 케이블, 및 관통형 모델용 외부 배선은 3m 미만의 케이블 사용을 권장합니다.
※ 서비스 제공용 항목 및 구성은 사전 예고 없이 변경될 수 있습니다.
2. 로봇 설치하기
2.1 로봇 설치하기기
- 로봇의 포장을 해제한 후, 로봇을 고정할 볼트의 홀 위치에 맞추어 정렬하여 배치하십시오.
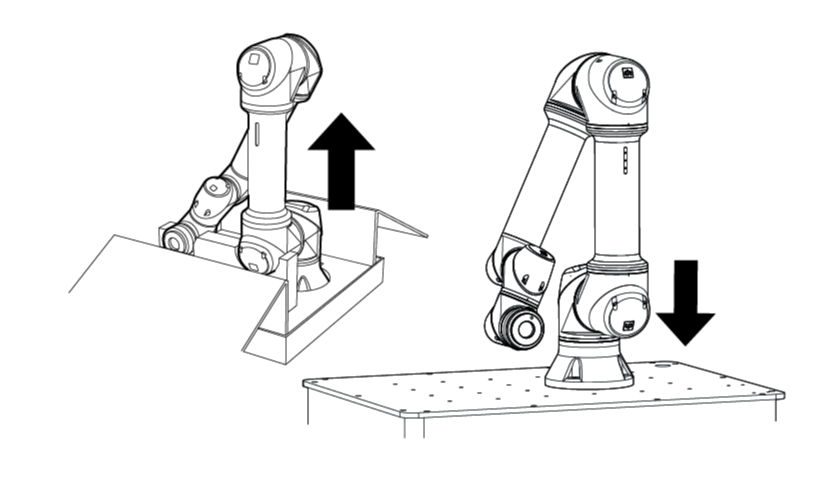
- 제공된 렌치와 볼트를 사용하여 로봇을 고정하십시오.
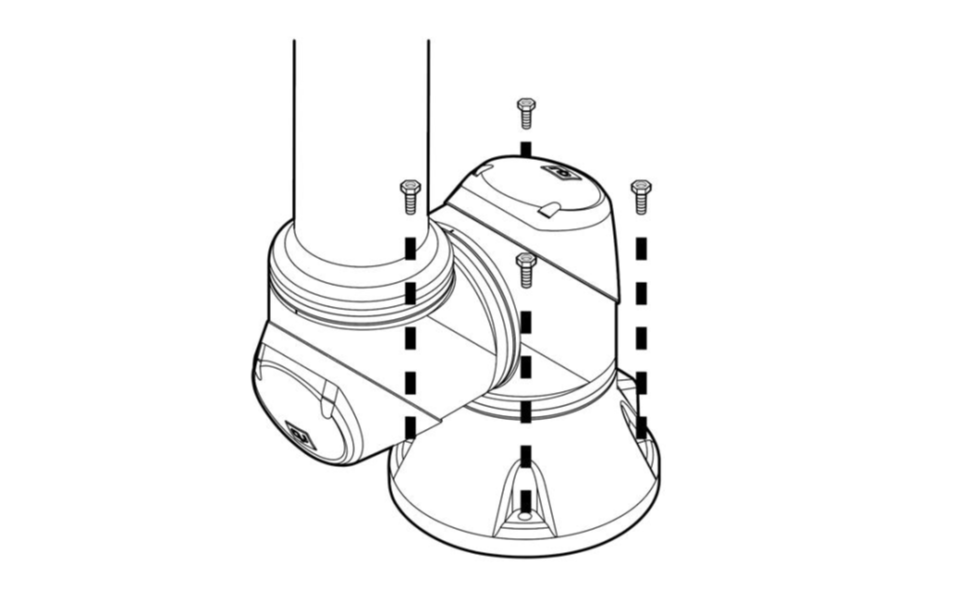
WARNING
- 로봇을 고정할 때, 볼트가 풀리지 않도록 단단히 조여졌는지 반드시 확인하십시오.
- 로봇은 자체 중량 및 작동 시 발생하는 하중을 충분히 견딜 수 있는 견고한 표면에 설치하십시오.
- 로봇 설치 면과 베이스 표면이 완전히 밀착되도록 설치해야 합니다.
- 로봇에 조립된 볼트를 임의로 분해하지 마십시오. 로봇 팔팔을 작동하기 전에 모든 볼트가 제대로 고정되어 있는지 확인하십시오.
- 볼트가 분해된 상태에서 로봇을 사용하거나, 해당 볼트 조립 부위를 이용하여 브래킷이나 기타 부품을 설치하는 경우, 제품이 손상되거나 안전에 심각한 영향을 줄 수 있습니다.
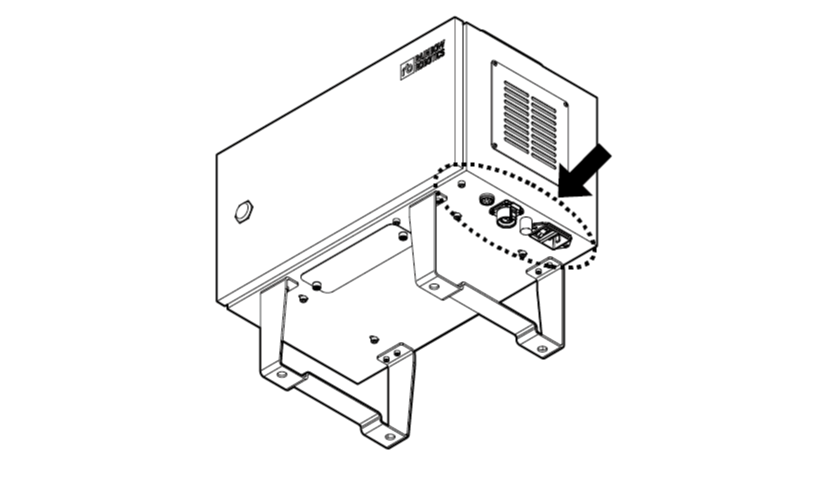
2.2 제어박스 연결하기
구성품에 포함된 케이블을 제어박스 하단의 해당 커넥터에 연결하십시오.
TIP
※ 아래에 표시된 제어박스의 외형은 로봇의 사양에 따라 변경될 수 있습니다.
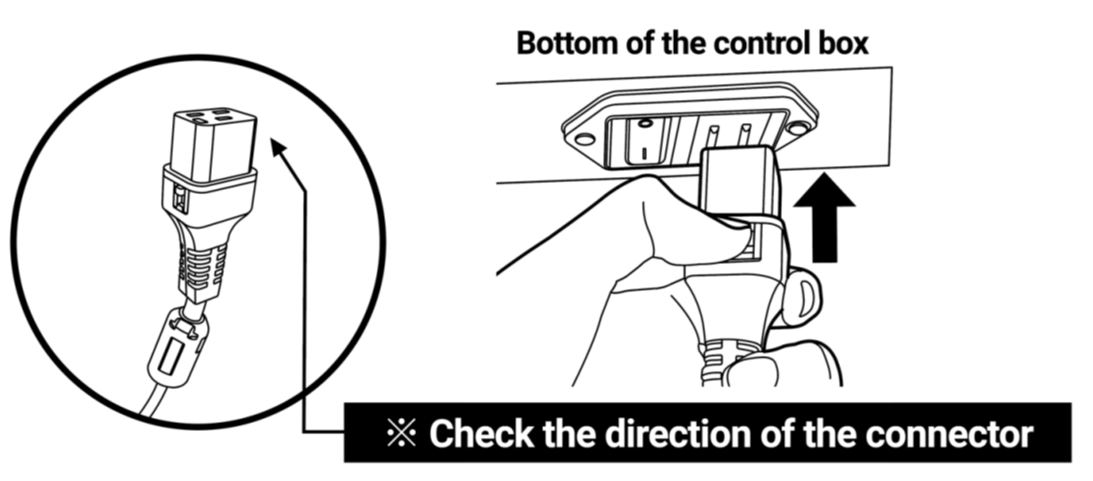
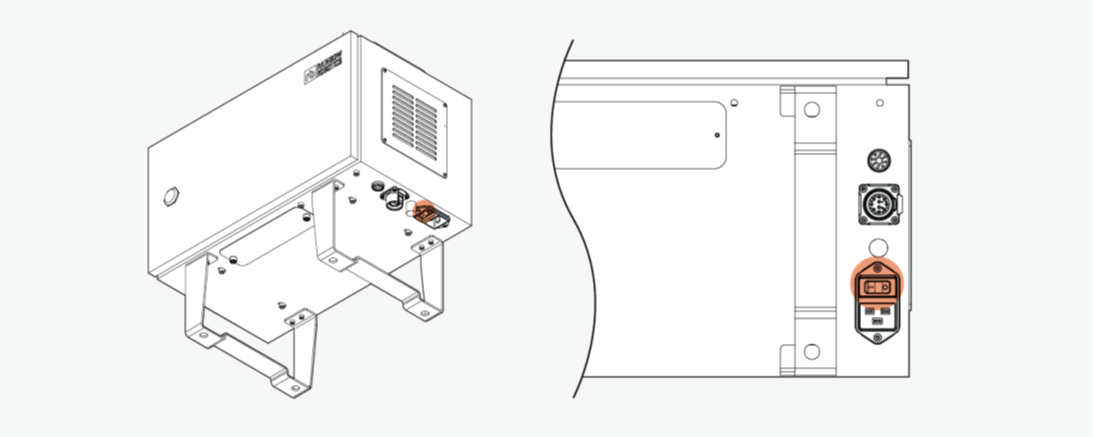
- AC 전원 케이블
AC 전원 케이블을 제어박스의 올바른 위치에 연결하십시오. (AC 전원)- 전원 공급은 단상 AC220/110V 이어야 합니다.
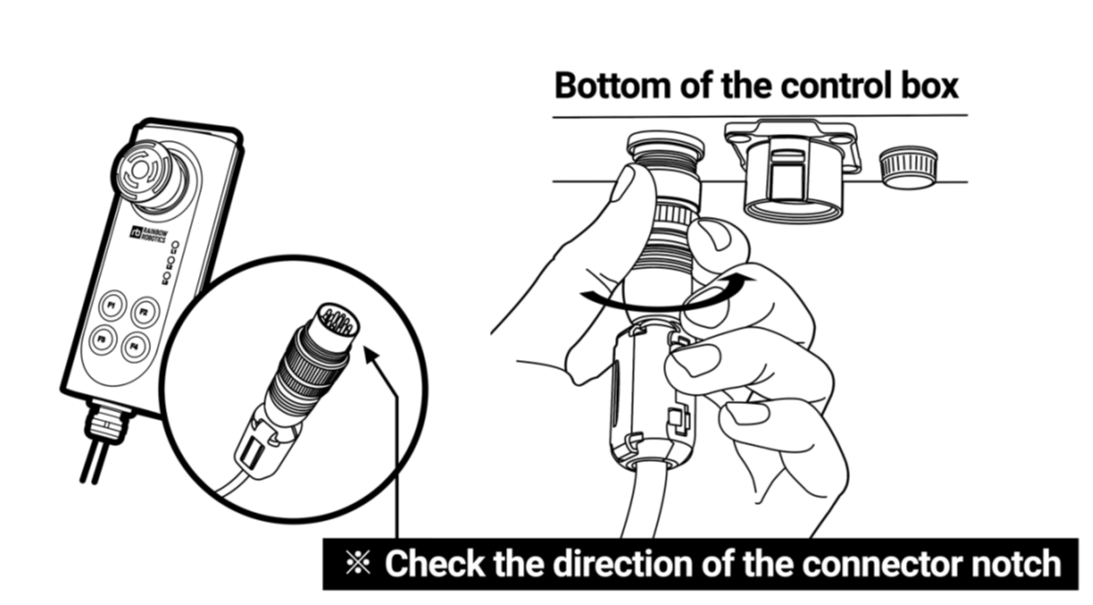
- 비상 정지 / 조그 인터페이스 (Male)
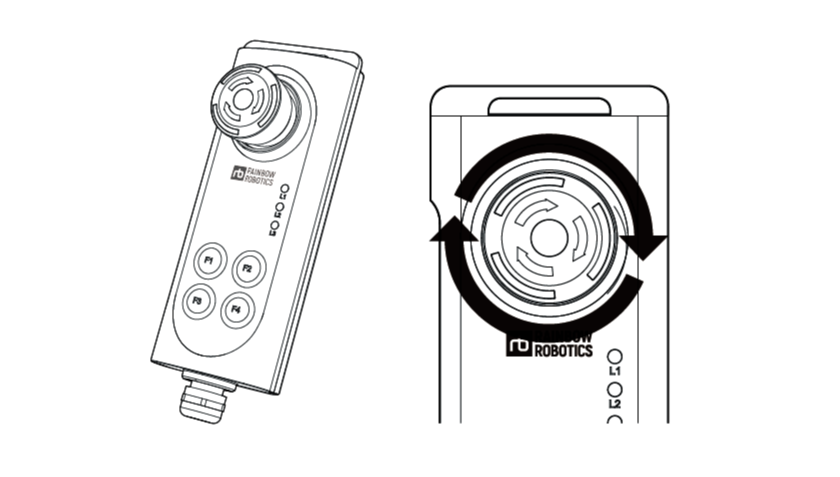
비상 정지/조그 인터페이스(E-STOP/JOG) 를 제어박스의 올바른 위치에 연결한 후, 시계 방향으로 돌려 고정하십시오.
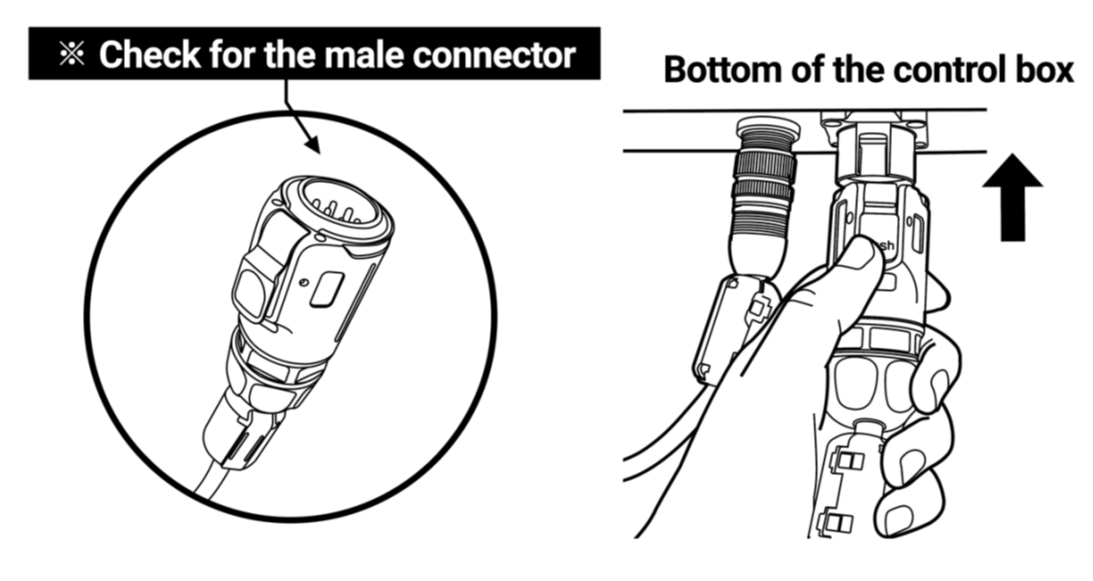
- 로봇-제어박스 연결 케이블 (Male)
로봇–제어박스 연결 케이블(수 커넥터)을 제어박스의 올바른 위치에 연결하십시오.
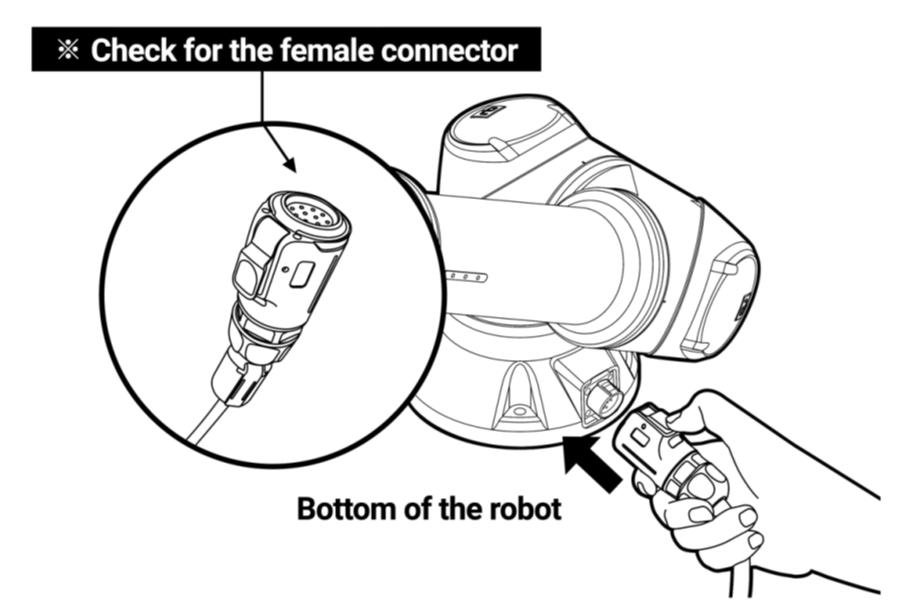
- 로봇-제어박스 연결 케이블 (Female)
로봇–제어박스 연결 케이블(암 커넥터)을 로봇의 올바른 위치에 연결하십시오.- 케이블을 연결할 때에는 핀 방향을 정확히 확인하십시오.
CAUTION
- 로봇의 전원이 켜진 상태에서는 AC 전원 케이블, 로봇–제어박스 연결 케이블, 태블릿 PC 커넥터 등을 분리하지 마십시오.
- AC 전원은 반드시 접지되어야 합니다.
3. 로봇 운용하기
3.1 전원 켜기
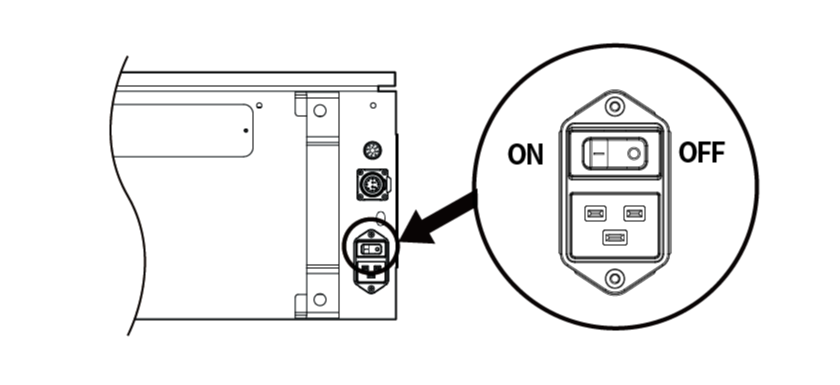
- 제어박스의 AC 전원 스위치를 켜십시오.
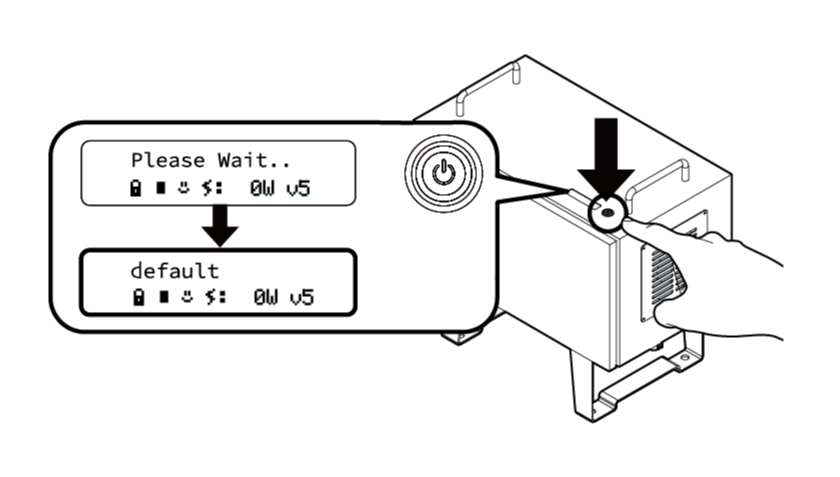
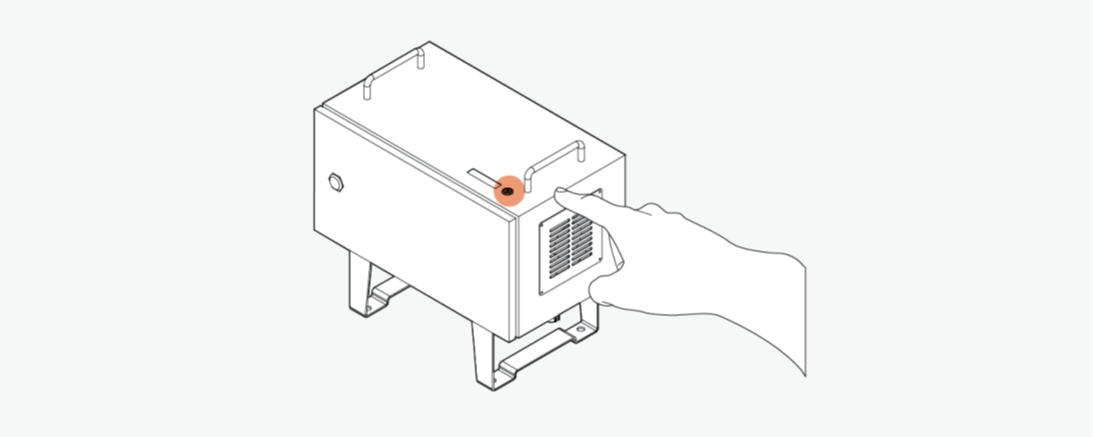
- 제어박스 상단의 전원 버튼을 눌러 메인 PC를 부팅하십시오.
※ 메인 PC가 부팅되는 동안, LCD 패널에는 “Please Wait” 문구가 표시됩니다.
메인 PC가 정상적으로 구동되면, LCD 패널에 “default” 또는 기본 동작 프로그램 파일명이 표시됩니다.
- 비상 정지/조그 인터페이스의 비상 정지 스위치를 시계 방향으로 돌려 해제하십시오.
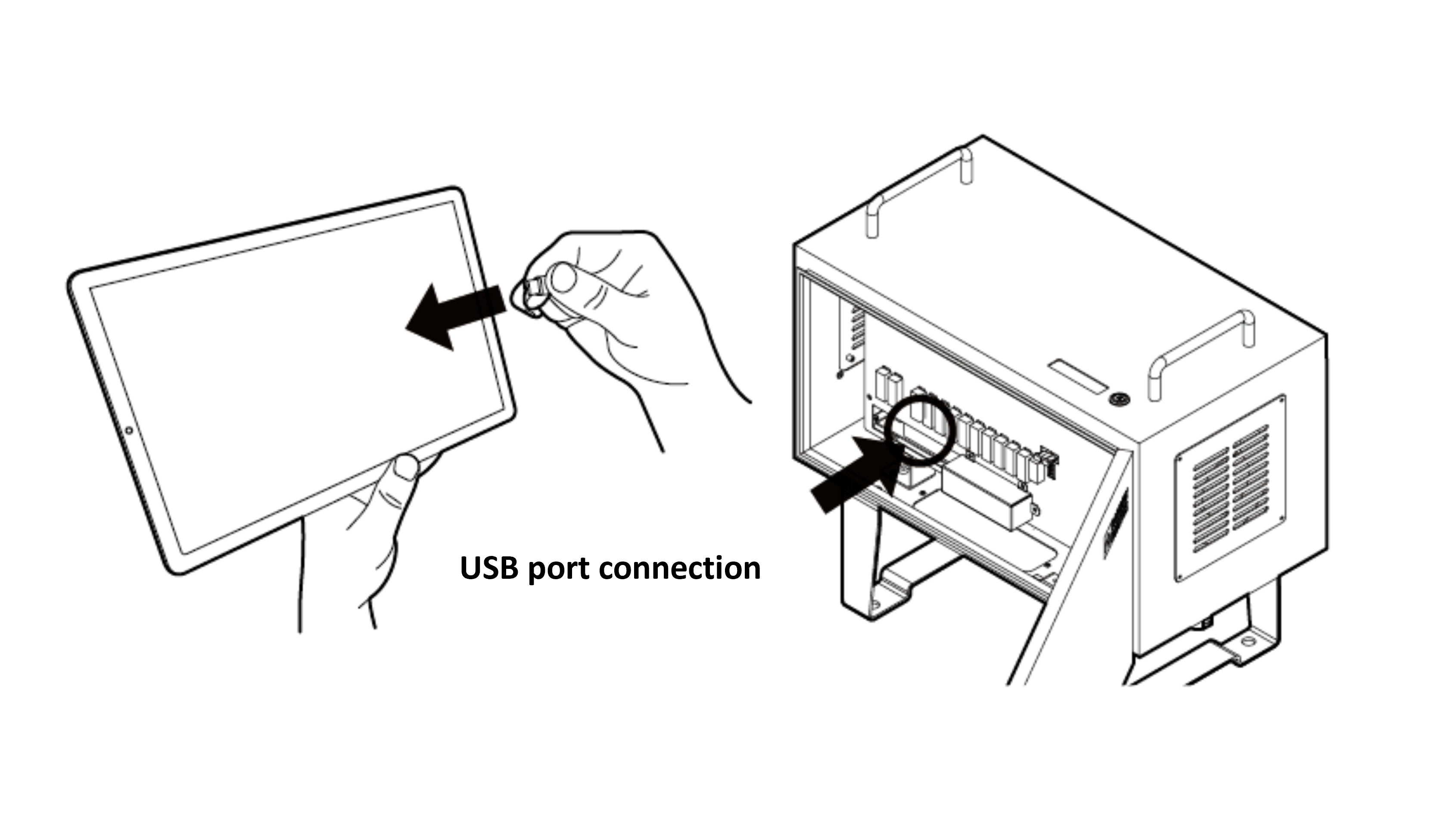
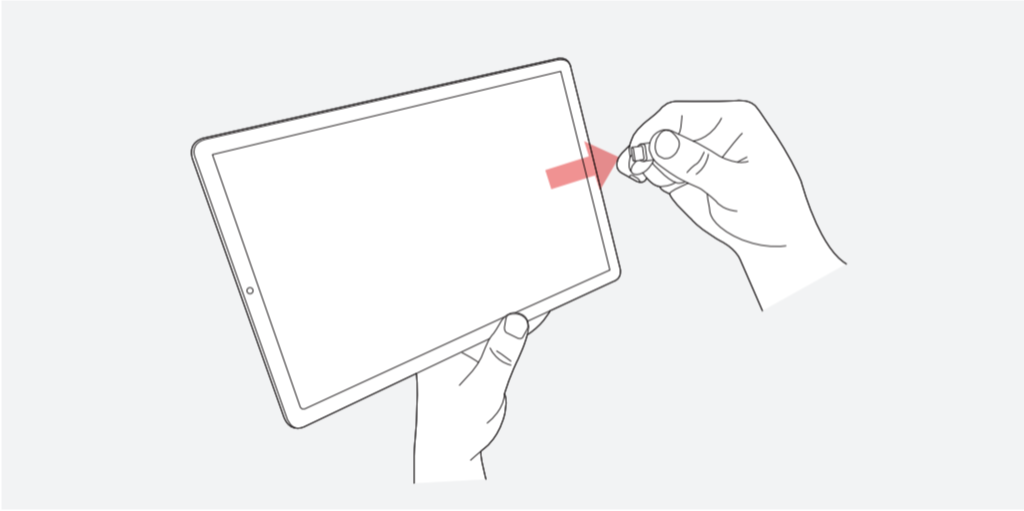
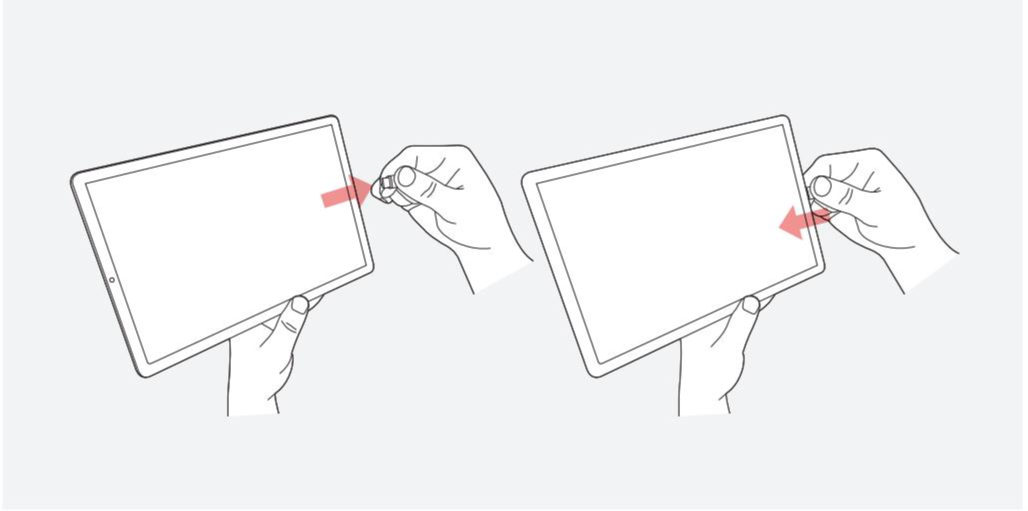
- 태블릿 PC를 제어박스에 연결하십시오.
3.2 Ui와 로봇 연결
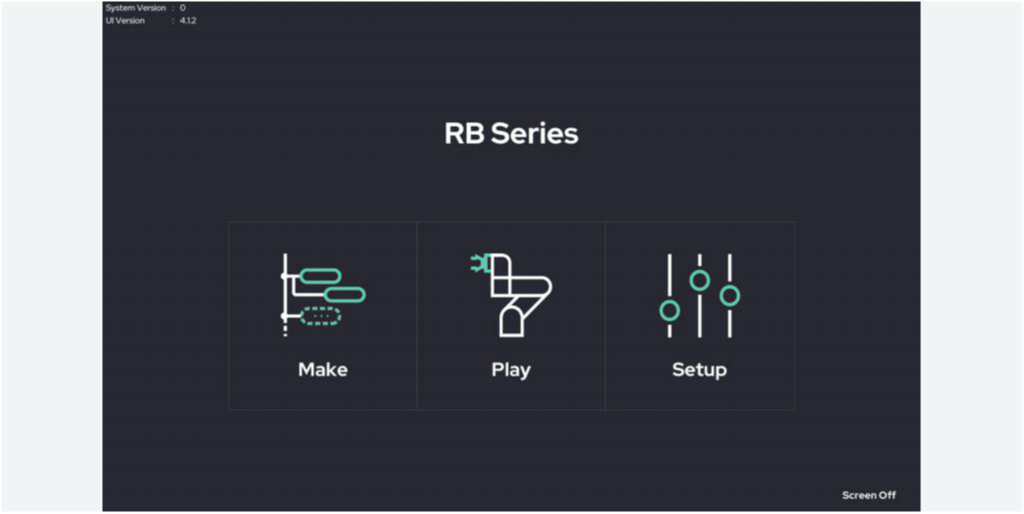
- 팬팬던트에서 “Rainbow-RB” 앱을 클릭하여 UI를 실행하십시오.

메인 화면에는 3개의 메뉴(Make, Play, Set-up)가 있으며, 이를 통해 로봇 동작 생성(Make), 실제 동작 실행(Play), 작업 환경 설정(Set-up)의 세 단계로 진입할 수 있습니다.
- “Make” 버튼을 클릭하십시오.
- 그림에 표시된 빨간색 상자의 아이콘을 클릭하십시오.

- Robot State 화면이 나타나면, “Connect” 버튼을 눌러 제어박스와 태블릿 PC를 연결하십시오.
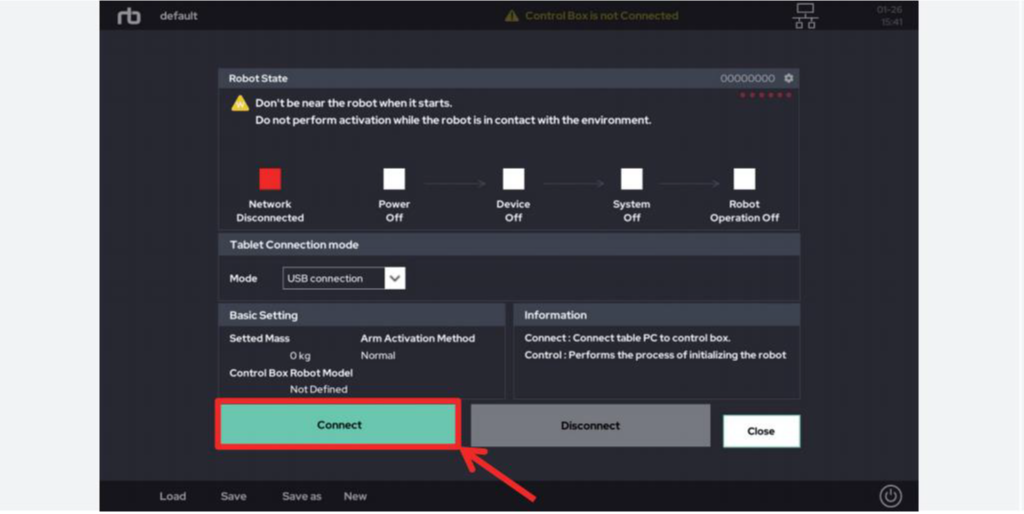
CAUTION
- 연결을 시도하기 전에 제어박스의 전원이 켜져 있고, 비상 정지 스위치가 해제되어 있는지 확인하십시오. 제어박스의 전원이 꺼져 있는 경우, “Device Off” 문구가 빨간색으로 표시되며 화면이 이전 화면으로 되돌아갑니다.
- 로봇과 정상적으로 연결되면, 그림에 표시된 빨간색 상자의 LED 표시등이 녹색으로 변경됩니다.
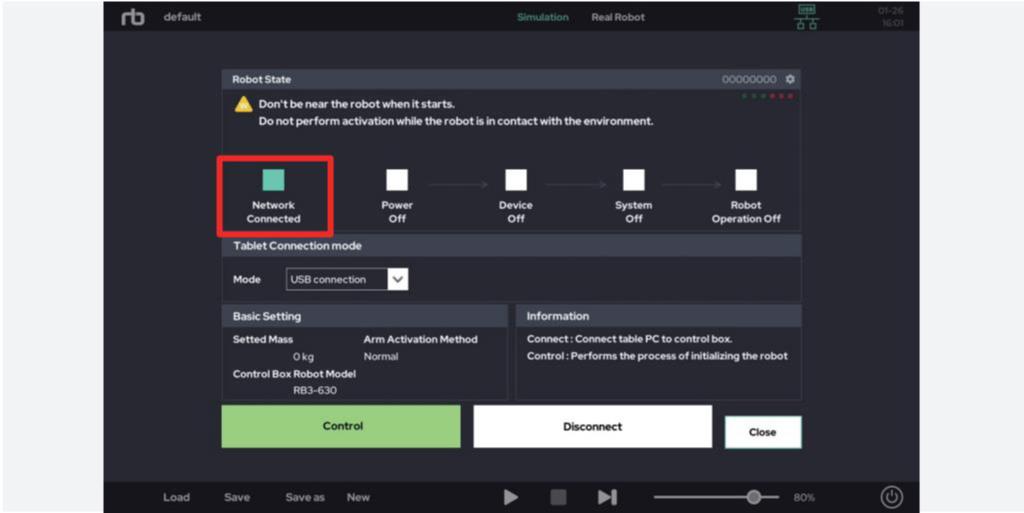
TIP
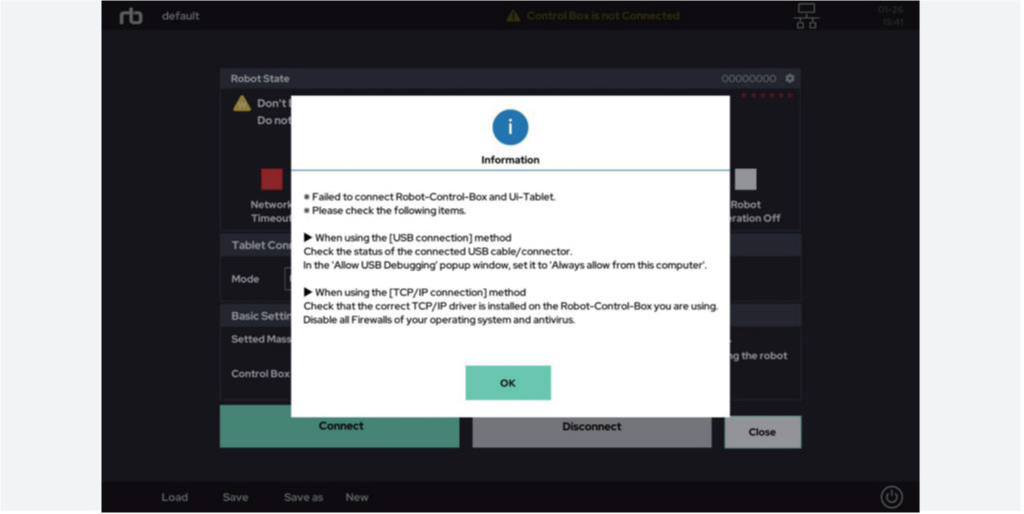
※ 네트워크 연결 중 문제가 발생한 경우, **[부록 A]**를 참고하십시오.
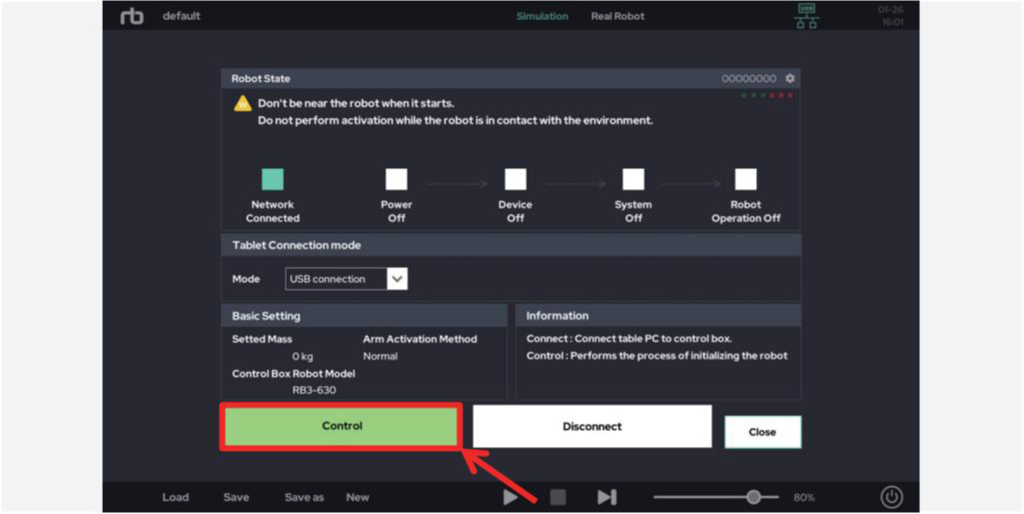
- “Control”을 클릭하면 로봇을 직접 조작할 수 있는 상태로 전환됩니다.
“Control” 버튼을 클릭하면 로봇 팔이 제어 가능한 상태로 초기화됩니다.
이때 관절의 브레이크가 해제되며, 로봇 팔팔에서 순차적으로 작동음이 발생합니다.
TIP
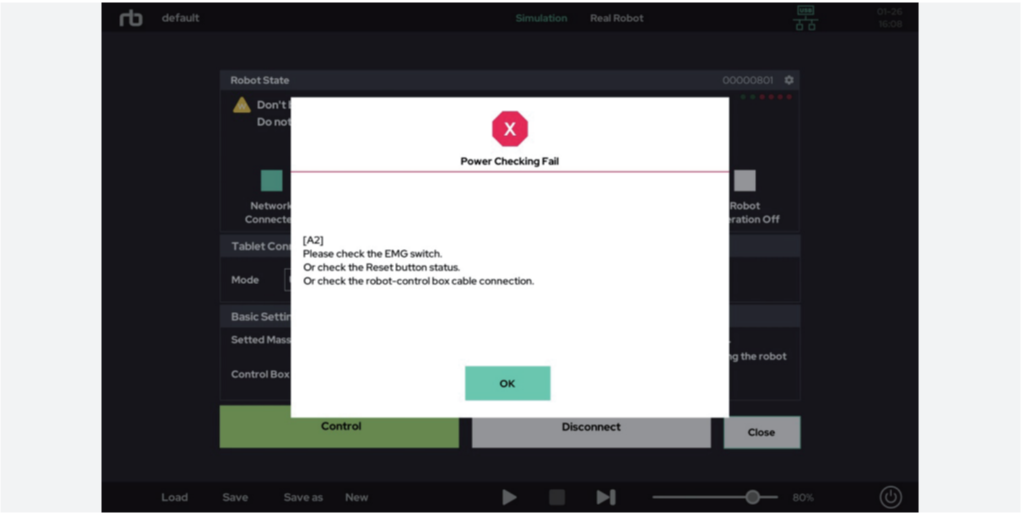
※ 로봇 활성화 중 문제가 발생한 경우, **[부록 B]**를 참고하십시오.
- 모든 LED 표시등이 녹색이어야 합니다 (그렇지 않으면 에러 코드가 표시됩니다). 이후 “Close” 버튼을 클릭하십시오.
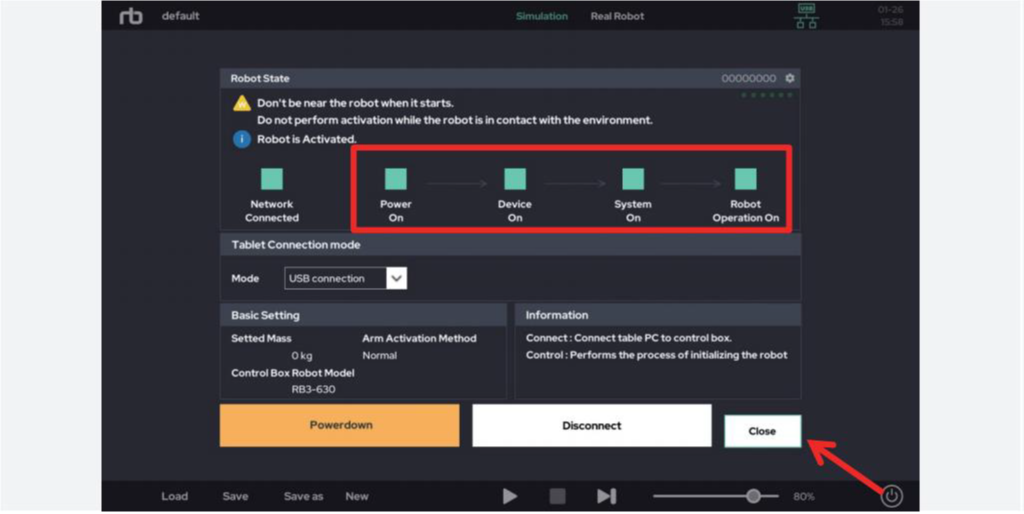
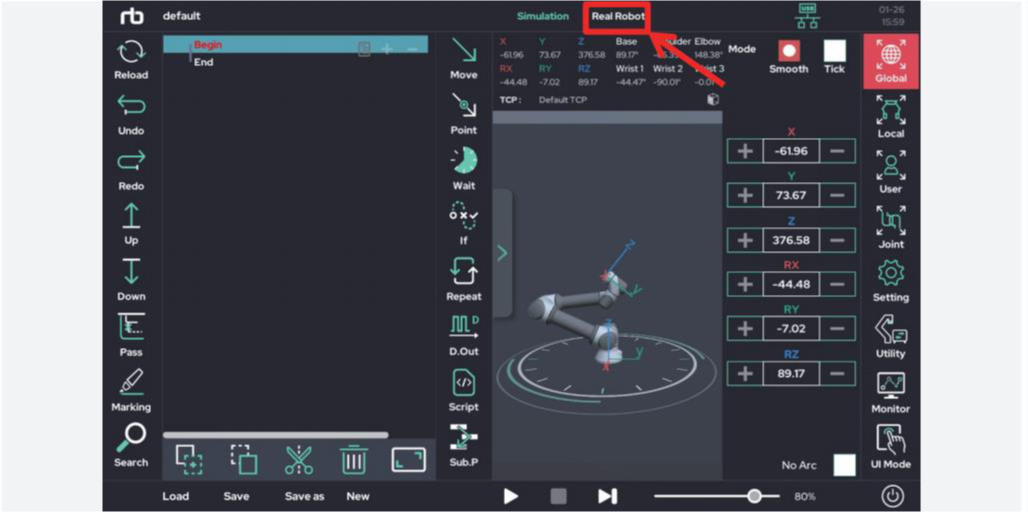
- 그림에 표시된 빨간색 상자 내의 “Real Robot”을 클릭하십시오.
“Real Robot” 모드는 Ui 화면상의 로봇뿐만 아니라 실제 로봇까지 함께 동작하는 모드입니다.
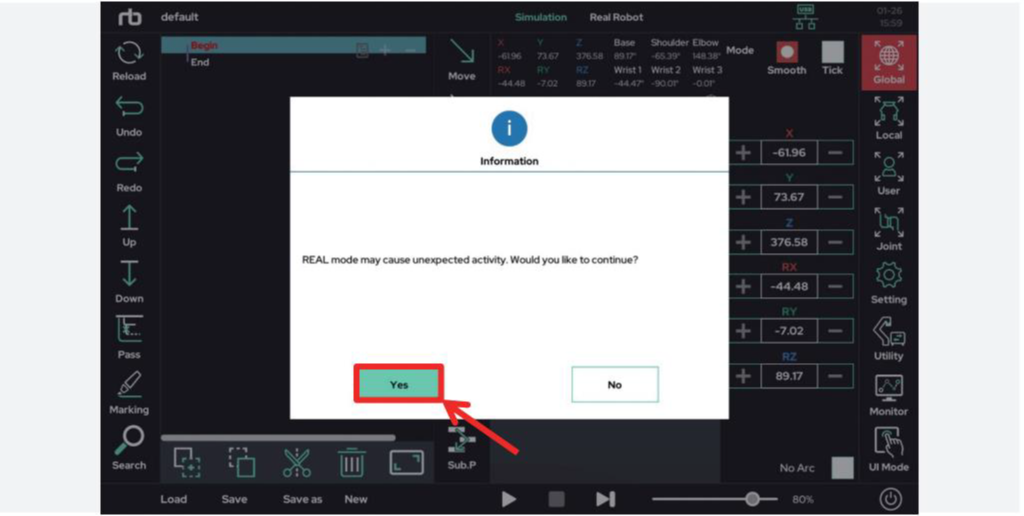
- 메시지 박스가 표시되면, “Yes” 버튼을 클릭하십시오.
- 그림에 표시된 빨간색 상자의 조그 기능을 사용하여 로봇을 이동시킬 수 있습니다. 자세한 내용은 사용자 매뉴얼을 참고하십시오.

WARNING
비상 정지/조그 인터페이스를 사용하여 로봇을 이동시키기 전에, 주변에 사람이나 장애물이 없는지 반드시 확인하십시오.
3.3 전원 끄기
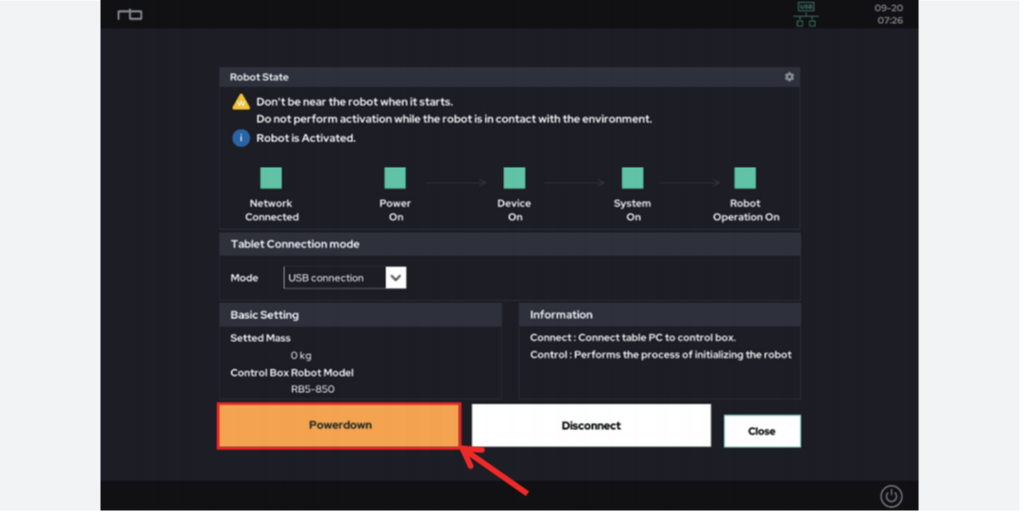
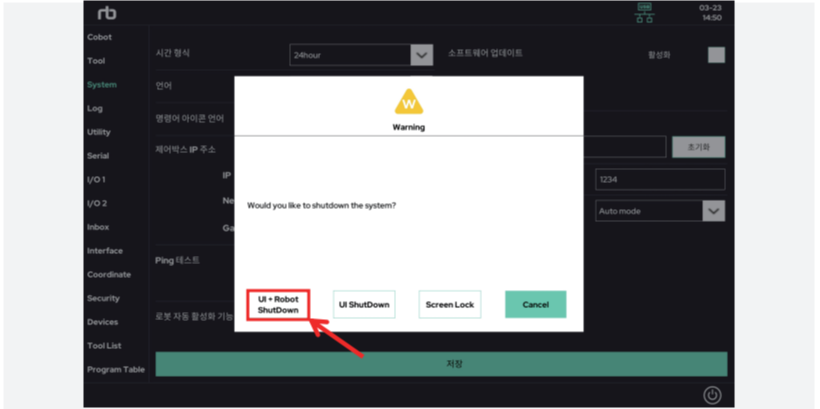
- 그림에 표시된 빨간색 상자의 아이콘을 클릭하십시오.

- 로봇을 종료하려면 “Powerdown”을 클릭하십시오. 이때 관절 브레이크가 작동되며, 로봇 팔에서 순차적으로 작동음이 발생합니다.
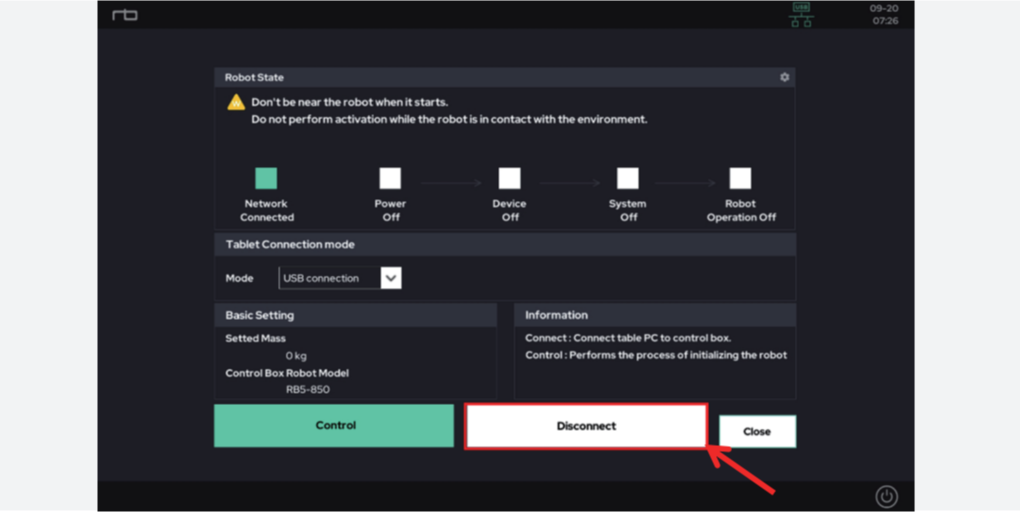
- “Disconnect” 버튼을 클릭하십시오.
※ 로봇과 UI를 동시에 종료하려면, 우측 하단의 전원 버튼을 클릭한 후 “UI+Robot Shut Down” 버튼을 선택하십시오.

- 제어박스 상단의 전원 버튼을 3초 이상 길게 눌러 메인 PC를 종료하십시오.
- 제어박스 하단의 AC 전원 스위치를 눌러 전원을 차단하십시오.
4. 부록 (문제 해결)
A. 네트워크 연결 문제
- 태블릿에 연결된 USB-C 타입 케이블을 분리하십시오.
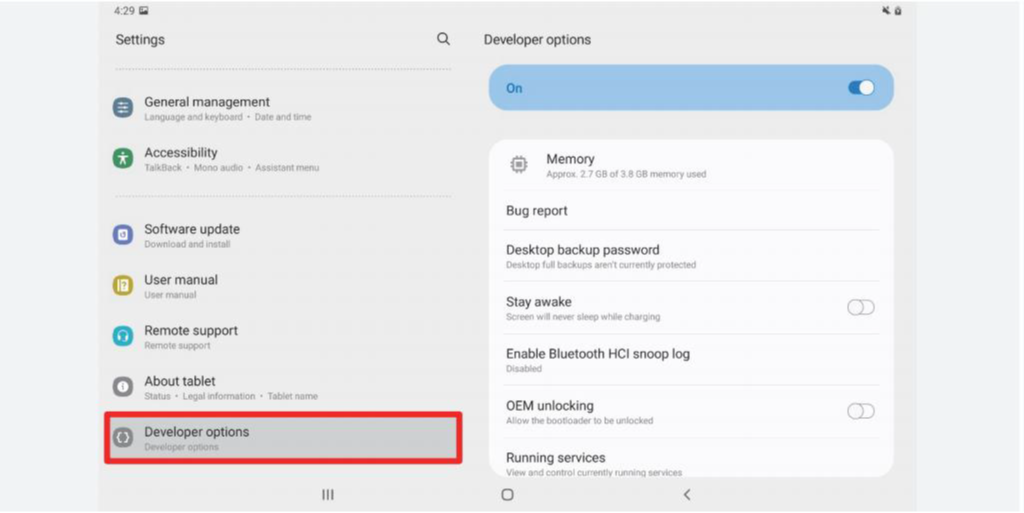
- 태블릿 설정으로 이동하십시오.
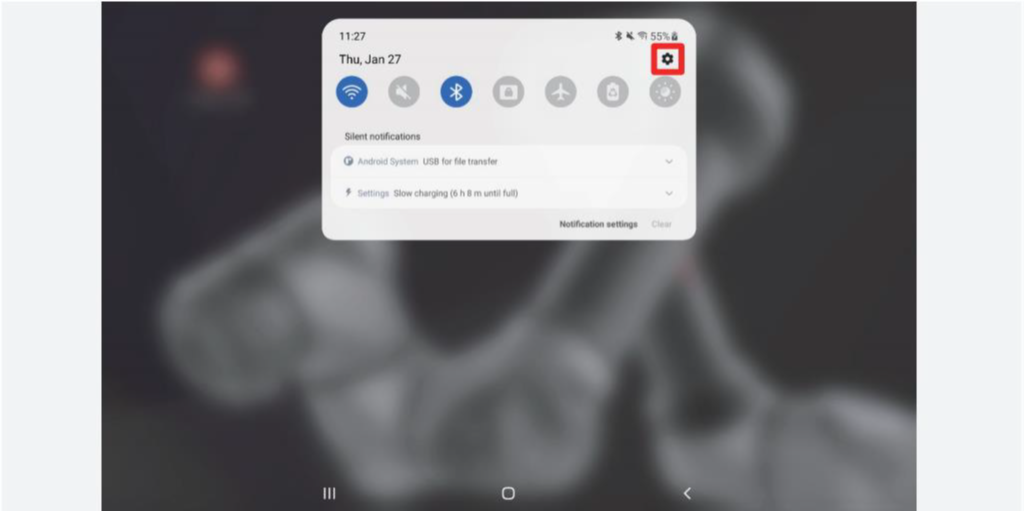
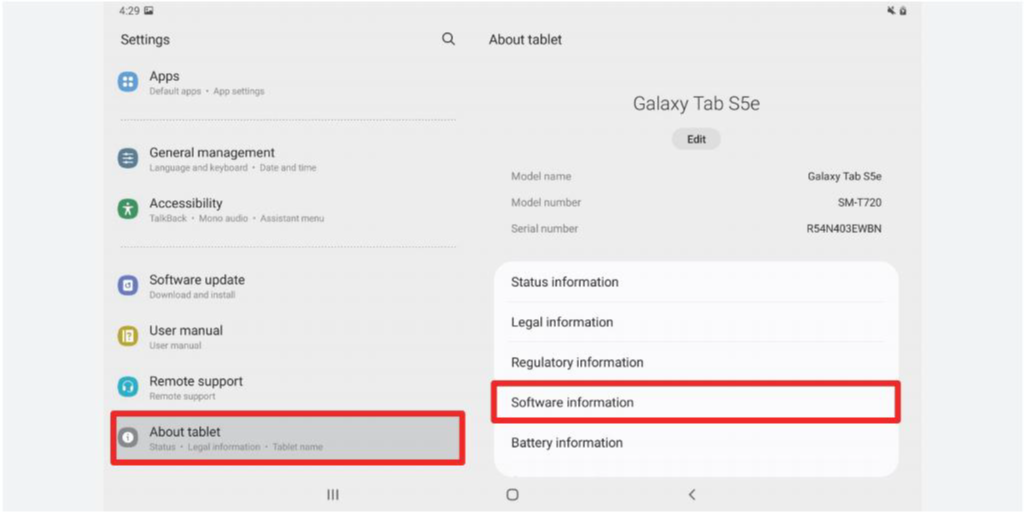
- 하단의 ‘태블릿 정보’로 이동한 후 → ‘소프트웨어 정보’를 선택하십시오.
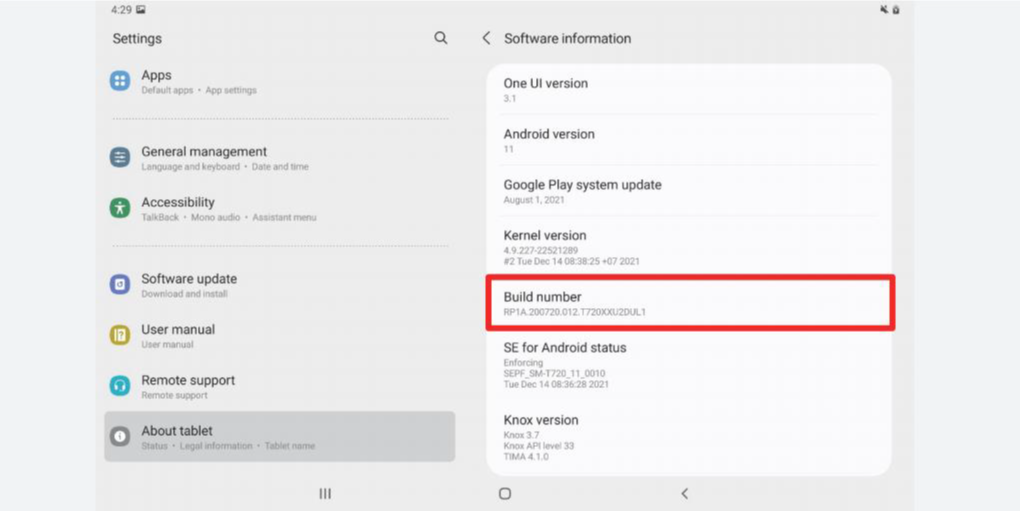
- “빌드 번호”를 여러 번 연속해서 클릭하십시오.
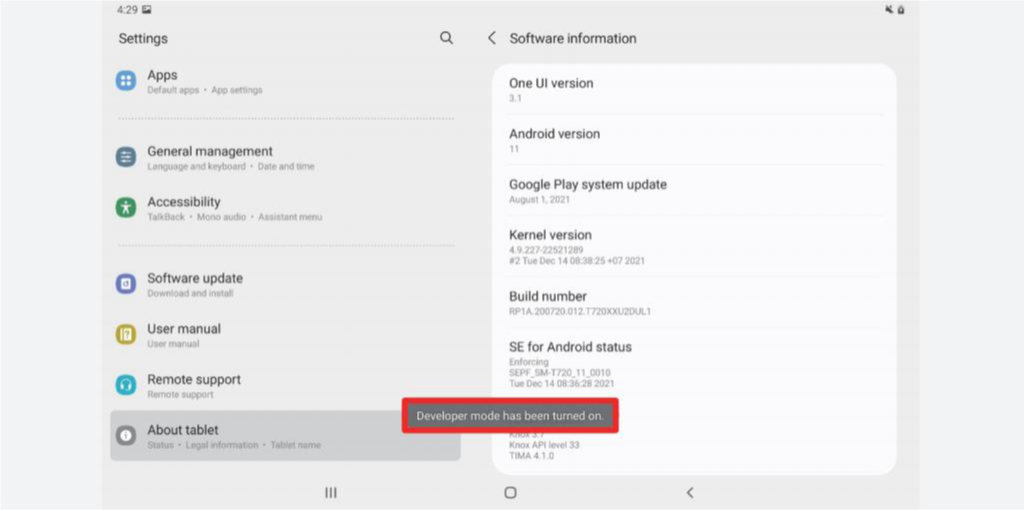
- 다음과 같은 팝업이 표시되면, 개발자 모드가 정상적으로 활성화된 것입니다.
- 개발자 모드로 전환하십시오.
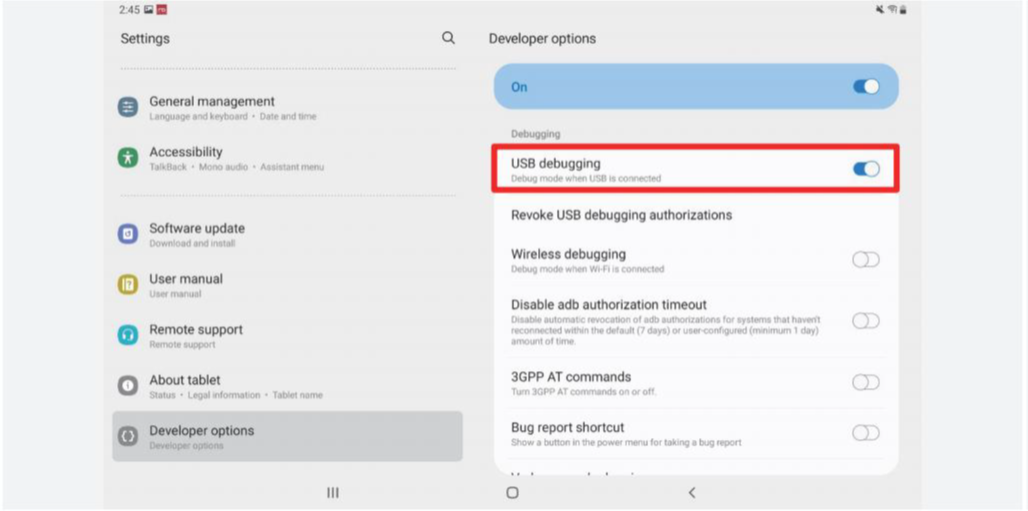
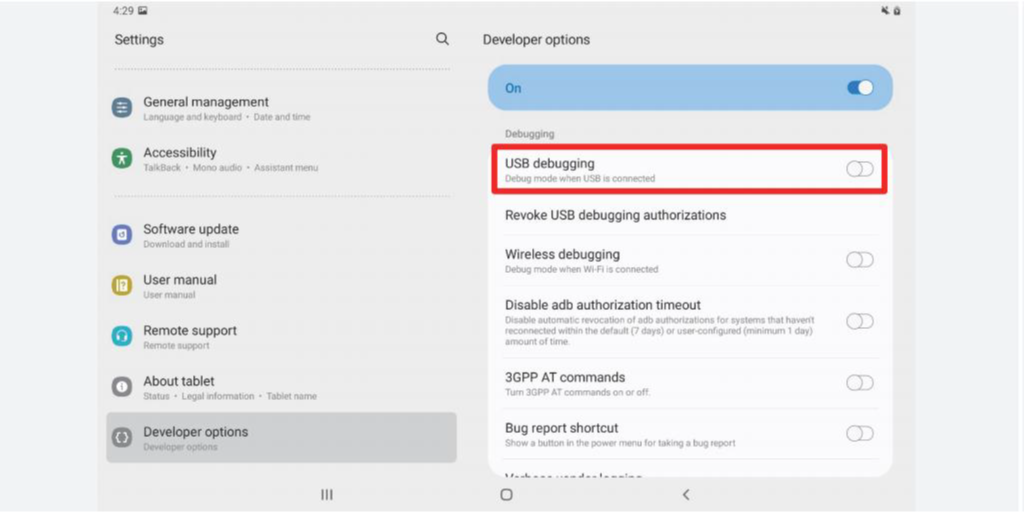
- USB 디버깅이 활성화되어 있는 경우, 이를 비활성화하십시오.
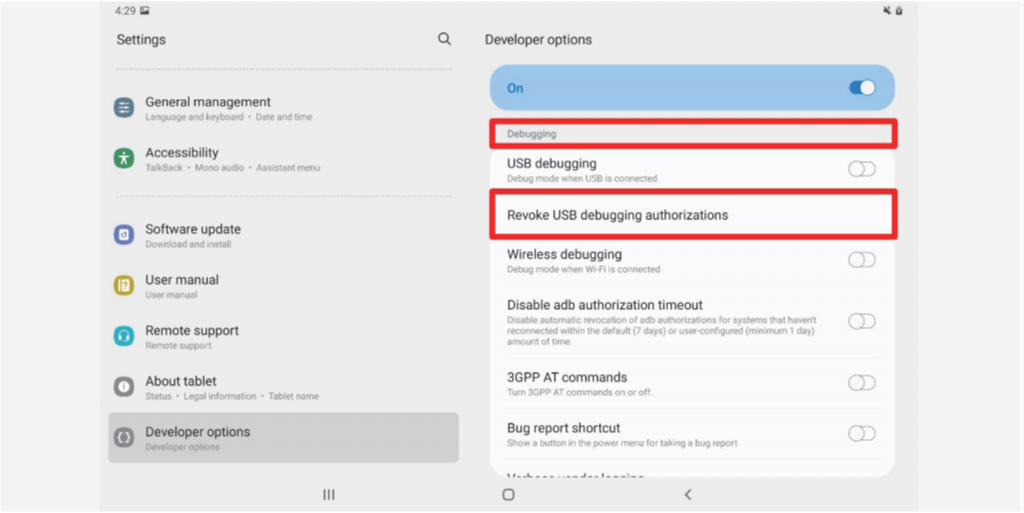
- 하단의 디버깅 섹션으로 이동하여 “USB 디버깅 권한 취소”를 선택하십시오.
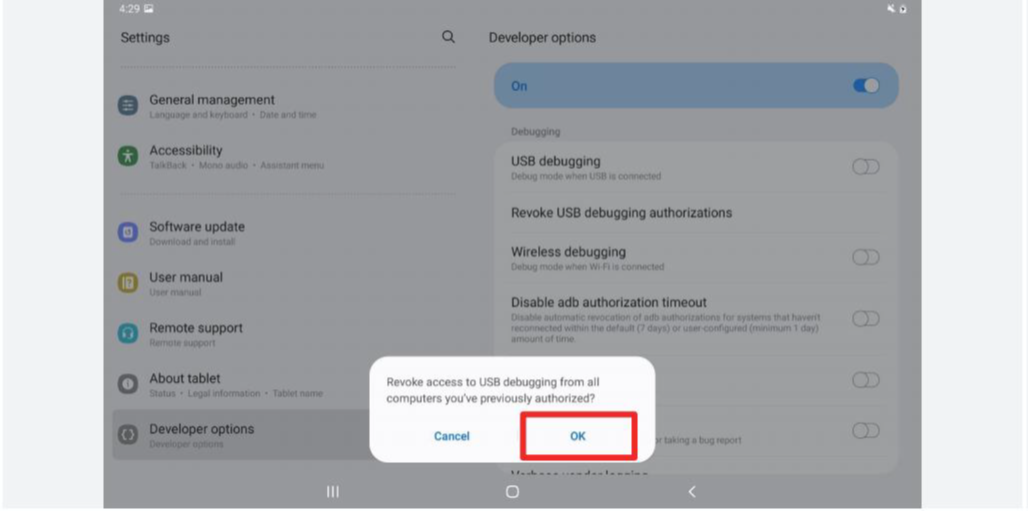
- “OK” 버튼을 클릭하십시오.
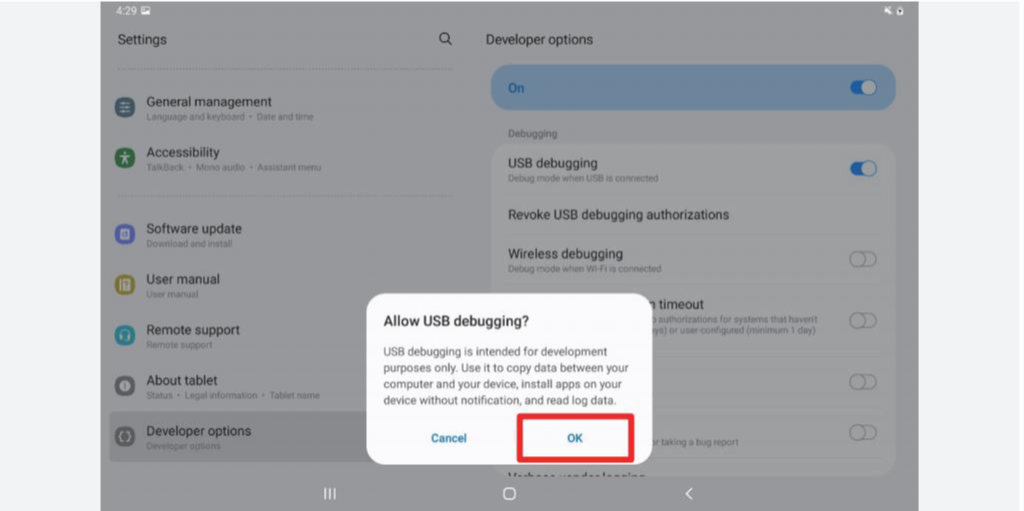
- USB 디버깅 기능을 다시 활성화하십시오.
- “OK” 버튼을 클릭한 후, USB-C 타입 케이블을 다시 연결하십시오.
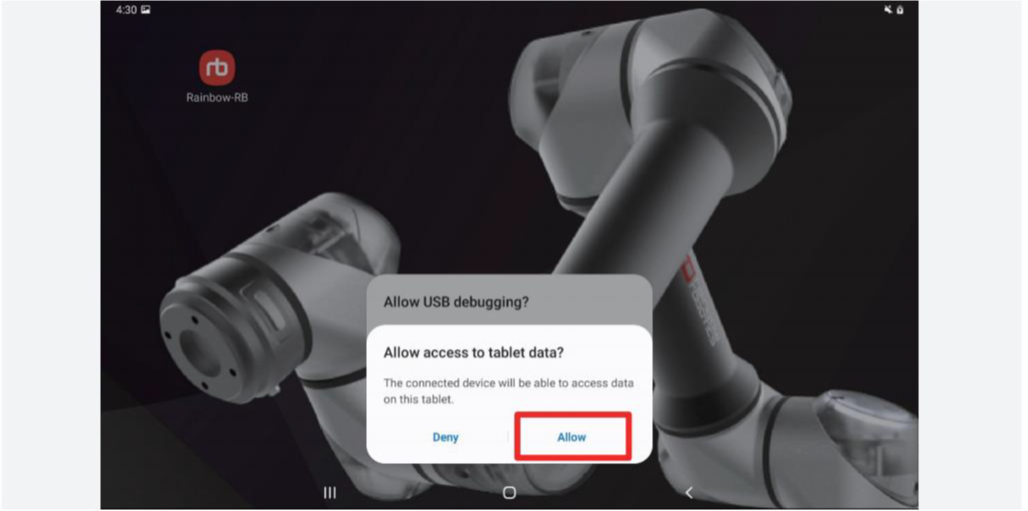
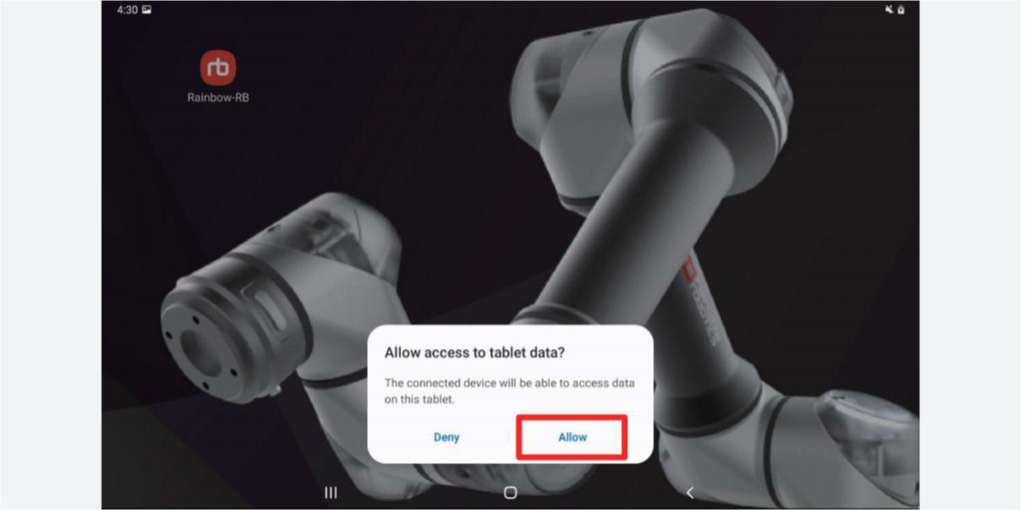
- “Allow” 버튼을 클릭하십시오.
- “이 컴퓨터에서 항상 허용” 체크박스를 선택한 후, “Allow” 버튼을 클릭하십시오.
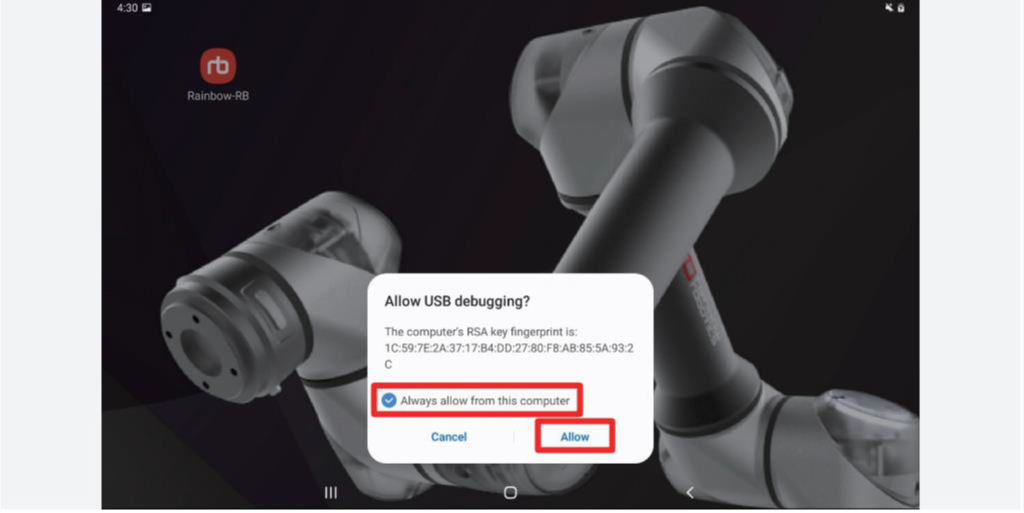
- 태블릿에 연결된 USB-C 타입 케이블을 분리한 후 다시 연결하십시오.
- “Allow” 버튼을 클릭하십시오.
※ 위 문제가 지속될 경우, Rainbow Robotics로 문의해 주십시오.
B. 활성화 오류
a. 오류 코드 A2 문제가 발생한 경우
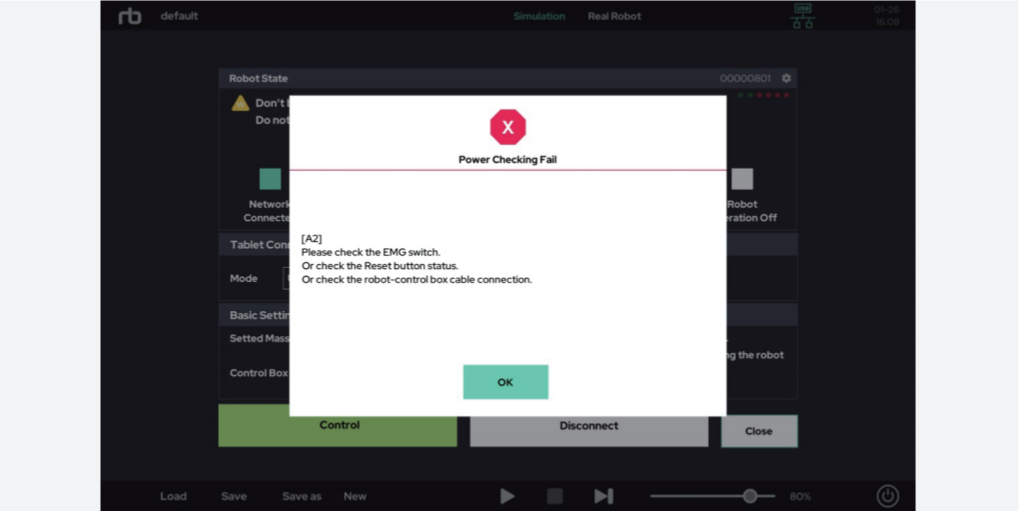
- 비상 정지/조그 인터페이스 스위치가 눌려 있는지 확인하십시오.
- 로봇과 제어박스 간 연결 케이블이 올바르게 연결되어 있는지 확인하십시오.
b. 오류 코드 A4 문제가 발생한 경우
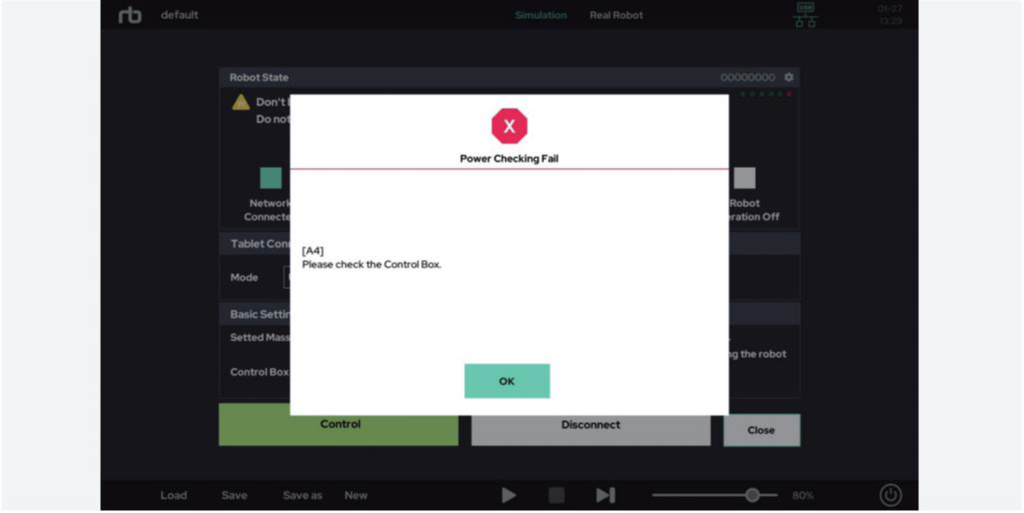
- 로봇과 제어박스를 연결하는 케이블이 올바르게 연결되어 있는지 확인하십시오.
c. 오류 코드 A12 문제가 발생한 경우
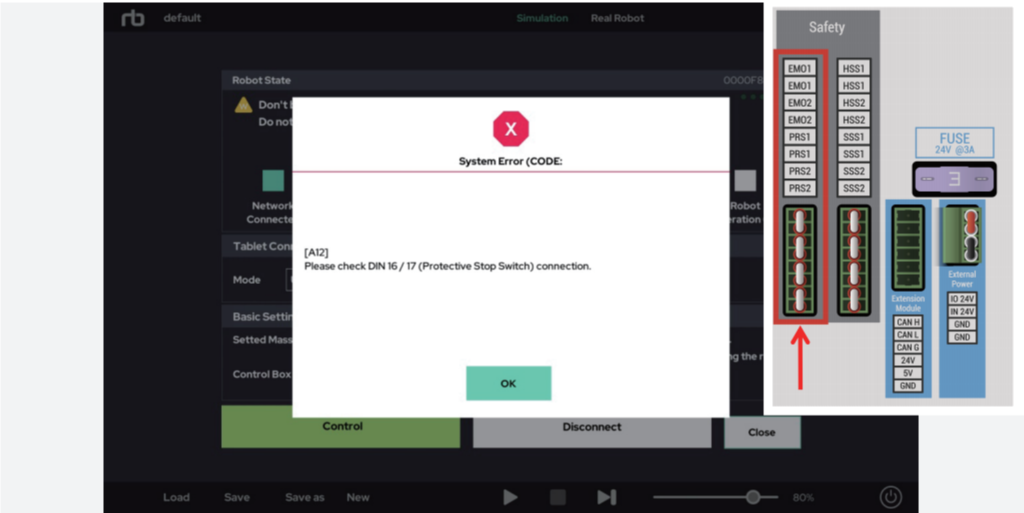
- 단자대의 EMO 및 PRS 영역에 쇼트바(Short Bar)가 삽입되어 있는지 확인하십시오.
d. 오류 코드 A53 문제가 발생한 경우
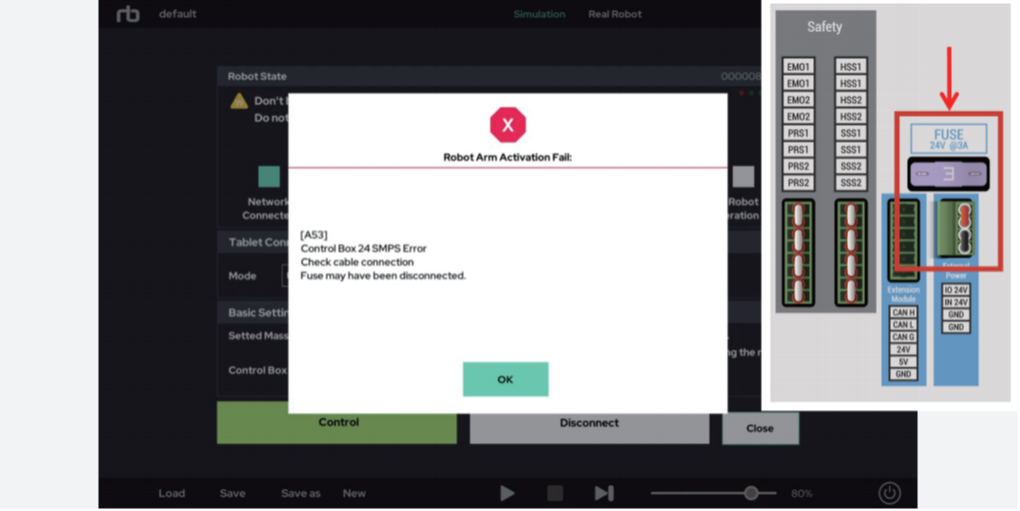
- 단자대의 퓨즈(Fuse) 및 외부 전원 영역에 쇼트바(Short Bar)가 삽입되어 있는지 확인하십시오.
- 퓨즈가 끊어지지 않았는지(단선 여부)를 확인하십시오.
e. 오류 코드 A93 문제가 발생한 경우
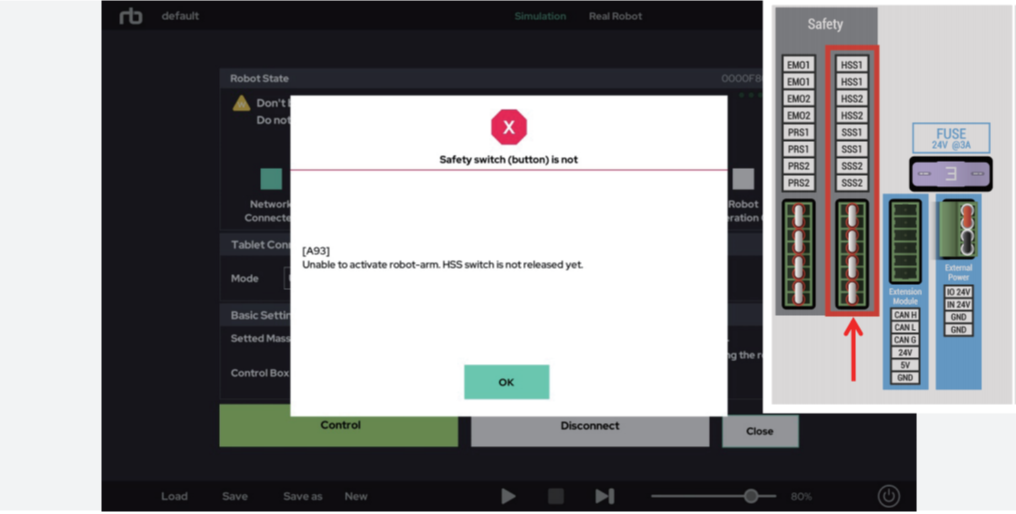
- 단자대의 HSS 및 SSS 영역에 쇼트바(Short Bar)가 삽입되어 있는지 확인하십시오.
TIP
※ 위 문제가 계속 발생할 경우, (주)레인보우로보틱스에 문의하십시오.
※ 기타 오류 코드가 발생한 경우, 본 사용자 가이드를 참고하십시오.