통신 포트 보안에 관한 기본 안내서 v2.0
1. 통신 포트 개요
Rainbow Robotics (레인보우 로보틱스) 의 로봇 제어 박스 (Robot-Control Box)에서는 아래와 같은 네트워크 통신이 제공됩니다.
- 로봇 제어 및 데이터 수집 등을 위한 네트워크
- 로봇 제어: 5000 번 포트
- 로봇 데이터 수집: 5001 번 포트
- 산업용 통신 및 일반 데이더 송수신 용 네트워크
- Modbus TCP: 502 번 포트
- Misubishi MC 통신: 사용자 지정 포트
- LS Elec. XGT 통신: 2004 번 포트
- OMRON FINS 통신: 사용자 지정 포트
- SIEMENS S7 통신: 102 번 포트
- HMI MemLink 통신: 사용자 지정 포트
- 일반 소켓 통신: 사용자 지정 포트
위와 같이 5000, 5001 포트는 항상 열려있으며, 나머지 데이터 네트워크 포트는 사용자의 명시적인 사용여부 설정/프로그램이 있어야만 사용 가능합니다.
2. 통신 보안
앞선 1장에서, 보안이 요구되는 포트는 5000번과 5001번 포트 입니다.
나머지 데이터 포트는 사용자가 명시적으로 해당 기능을 사용 해야지만 사용되는 포트이기 때문입니다.
5000번 5001번 포트는 항상 열려있는 (open) 포트이기 때문에, 아래와 같은 두 가지 방법으로 네트워크 보안 구성을 할 수 있습니다.
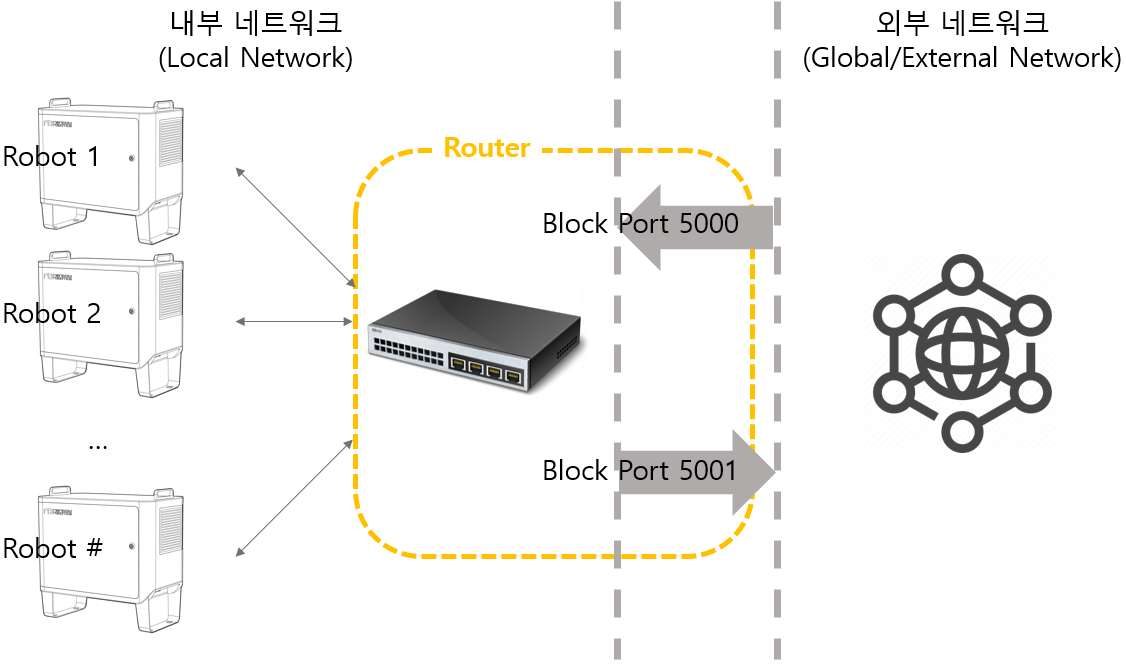
2.1 라우터/허브 단계에서 로봇 시스템으로 가는 5000/5001번 포트 차단
- 가장 간단하고, 확실한 방법입니다.
- 자동화 시스템 내부 네트워크와 외부 네트워크를 중계하는 라우터 (Router) 단계에서 포트를 막는 방법입니다. (포트 포워딩 차단)
- 외부에서 들어오는 5000/5001번 포트를 내부로 접근 못하도록 막는 방식입니다.
2.2 소프트웨어적인 키/문법을 통한 엑세스 차단
- 위의 2.1과 같은 방식으로 포트가 차단되어 있지 않더라도, 5000/5001 포트를 통해 제어/데이터 수신을 하기 위해서는 규정된 키와 문법이 필요합니다.
- 이를 통해서, 허가되지 않은 키 또는 규정되지 않은 문법으로 외부에서 엑세스 할 경우, 로봇은 동작을 멈추고, 해당 통신은 시스템에 영향을 미치지 않습니다.
3. 참고 자료
아래의 표는 데이터 송/수신용 기능/네트워크의 사용 범주를 나타냅니다.
| Manufacturer | Communication | Feature |
|---|---|---|
| SIEMENS | S7 Protocol | Server = PLC, Client = Robot |
| Modbus TCP Master | Client(Master) = Robot, Server(Slave) = PLC | |
| Modbus TCP Slave | Client(Master) = PLC, Server(Slave) = Robot | |
| RS232/485 | General Serial communication | |
| TCP/IP | General TCP/IP communication | |
| OMRON | FINS | Server = PLC, Client = Robot |
| Modbus TCP Master | Client(Master) = Robot, Server(Slave) = PLC | |
| Modbus TCP Slave | Client(Master) = PLC, Server(Slave) = Robot | |
| RS232/485 | General Serial communication | |
| TCP/IP | General TCP/IP communication | |
| MITSUBISHI | MC Protocol 1E-Binary | Server = PLC, Client = Robot |
| MC Protocol 3E-Binary | Server = PLC, Client = Robot | |
| Modbus TCP Master | Client(Master) = Robot, Server(Slave) = PLC | |
| Modbus TCP Slave | Client(Master) = PLC, Server(Slave) = Robot | |
| RS232/485 | General Serial communication | |
| TCP/IP | General TCP/IP communication | |
| LS ELEC. | XGT Protocol | Server = PLC, Client = Robot |
| Modbus TCP Master | Client(Master) = Robot, Server(Slave) = PLC | |
| Modbus TCP Slave | Client(Master) = PLC, Server(Slave) = Robot | |
| RS232/485 | General Serial communication | |
| TCP/IP | General TCP/IP communication | |
| PROFACE | Memory Link | Server = HMI, Client = Robot |
| M2I-TOP | Memory Link | Server = HMI, Client = Robot |