RB UI Script v6.10
1. 변수 선언 및 기초
레인보우 로보틱스의 UI Script 에서는 아래와 같은 형태의 데이터 형을 지원합니다.
- var : 단일 숫자를 저장합니다.
- arr : 배열을 저장합니다. (최대 길이 20 개)
- str : 문자열을 저장합니다.
- point, pnt : 자세 정보(x, y, z, Rx, Ry, Rz)를 저장합니다.
- joint, jnt : 관절 정보(J0, J1, J2, J3, J4, J5)를 저장합니다.
- vec : 숫자를 관리하는 벡터 입니다.
(숫자 / 문자열 벡터는 10장을 별도 참고하세요.)
변수 선언의 예시는 아래와 같습니다.
1.1 var
Example :
var my_val # 초기화 없이 할당합니다
var my_val = 1 # 초기화 하여 할당합니다1.2 arr
Example :
arr my_arr # 초기화 없이 할당합니다
arr my_arr = {1, 2, 3} # 초기화 하여 할당합니다1.3 str
Example :
str my_str # 초기화 없이 할당합니다
str my_str = “Hello” # 초기화 하여 할당합니다1.4 point, pnt
Example :
point my_point # 초기화 없이 할당합니다
point my_point = {100, 200, 300, 90, 0, 90} # 초기화 하여 할당합니다
pnt my_point = {50, 100, 100, 90, 0, 0}1.5 joint, jnt
Example :
joint my_joint # 초기화 없이 할당합니다
joint my_joint = {0, 0, 0, 90, 0, 0} # 초기화 하여 할당합니다
jnt my_joint = {30,0,0,90,0,0}1.6 약어
본 문서에서 사용하는 약어는 아래와 같습니다.
| 약어 | 의미 |
|---|---|
| v | var 타입 변수 또는 상수를 지칭 |
| a | arr 타입 변수를 지칭 |
| s | str 타입 변수 또는 문자열을 지칭 |
| P | point 타입 변수를 지칭 |
| J | joint 타입 변수를 지칭 |
1.7 point 타입과 joint 타입
앞서 설명한 point 타입과 joint 타입은 임시 변수를 활용할 수 있습니다.
- point 임시 변수 : pnt[x, y, z, Rx, Ry, Rz]
- joint 임시 변수 : jnt[J0, J1, J2, J3, J4, J5]
이러한 임시 변수는 별도의 이름 선언 없이 바로 사용할 수 있으며, 아래와 같이 활용될 수 있습니다.
- 방법 1은 별도의 변수를 선언하고, 함수에서 사용하는 구조입니다.
- 방법 2는 변수를 별도로 선언하지 않고, 임시 변수 기능을 활용하여 함수 호출 인자로 바로 넘겨주는 구조입니다.
방법 1 :
jnt my_angle = {0,0,90,0,90,0} # my_angle 이라는 joint 형 변수를 선언합니다.
move_j(my_angle, 60, 80) # my_angle 이라는 변수를 move_j 의 인자로 전달합니다.
pnt my_point = {100, 200, 300, 90, 0, 0} # my_point 이라는 point 형 변수를 선언합니다.
move_l(my_point, 20, 5) # my_point 라는 변수를 move_l 의 인자로 전달합니다.방법 2 :
move_j(jnt[0,0,90,0,90,0], 60, 80) # 별도의 변수 선언 없이 바로 move_j 의 인자로 전달합니다.
move_l(pnt[100,200,300,90,0,0], 60, 80) # 별도의 변수 선언 없이 바로 move_l 의 인자로 전달합니다.위의 예시는 move_j(J, v, v)와 move_l(P, v, v)를 활용한 예시이며, 해당 함수와 관련된 자세한 내용은 7.동작 함수에서 확인할 수 있습니다.
1.8 UI Script 예시
RB UI Script 는 아래와 같이 사용됩니다.
예시 1. 단순 산술 연산
var a = 1 # a 라는 variable 선언, 초기값 1
var b = 2 # b 라는 variable 선언, 초기값 2
var c # c 라는 variable 선언
c = a *b + 5 + sqrt(4) # c 값이 9 가 대입됨.예시 2. 기본 동작
joint target_angle = {0, 0, 90, 0, 90, 0} # target_j 라는 joint 타입 변수 선언
move_j(target_angle, 60, 80) # move_j 로 이동, 속도/가속도 = 60/80
target_angle[0] = target_angle[0] + 45 # 0 번축 각도 값, 기존 값 + 45
move_j(target_angle, 60, 80) # move_j 로 이동, 속도/가속도 = 60/80
target_angle[0] = target_angle[0] + 45 # 0 번축 각도 값, 기본 값 + 45
move_j(target_angle, 60, 80) # move_j 로 이동, 속도/가속도 = 60/80
move_j(jnt[0, 0, 0, 0, 0, 0], 60, 80) # 모든 관절 0 도로 이동예시 3. 문자열 함수
str my_text = “123.78” # my_text 라는 문자열 선언
var result_1 = to_num_int(my_text) # result_1 에는 123 이 저장
var result_2 = to_num(my_text) # result_2 에는 123.78 이 저장
var result_3 = round( to_num(my_text) ) # result_3 에는 124 가 저장
str my_text2 = “abc” # my_text2 라는 문자열 선언
str my_text3 = my_text + my_text2 # my_text3 에는 “123.78abc”1.9 연산자
아래와 같은 비교 연산자, 논리 연산자를 사용할 수 있습니다.
1.9.1 비교 연산자
- A >= B
- 좌변이 우변보다 같거나 크면 1 (True), 작으면 0 (False)
- A <= B
- 우변이 좌변보다 같거나 크면 1 (True), 작으면 0 (False)
- A == B
- 좌변과 우변이 같으면 1 (True), 다르면 0 (False)
- A != B
- 좌변과 우변이 다르면 1 (True), 같으면 0 (False)
1.9.2 논리 연산자
A && B
A and B
A AND B
A And B
- 좌변과 우변이 모두 True 일 경우만 1 (True), 아니면 0 (False)
A || B
A or B
A OR B
A Or B
- 좌변과 우변 중 하나라도 True 일 경우 1 (True), 두 값 모두 False 일 경우 0 (False)
1.9.3
비교/논리 연산에서 사용되는 참과 거짓은 아래와 같은 값으로 대응됩니다.
참 : True = TRUE = true = 1
거짓 : False = FALSE = false = 0
따라서 다음과 같은 예시 2개는 같은 표현이 됩니다.
예 1.
if (SD_SOCK_IS_OPEN_0 == True){
// something to do
}예 2.
if (SD_SOCK_IS_OPEN_0 == 1){
// something to do
}1.10 단위
Rainbow Robotics 의 Script 문법에서는 아래와 같은 단위를 사용합니다.
- 각도 : Degree (도)
- 위치 : mm (미리미터, 0.001m)
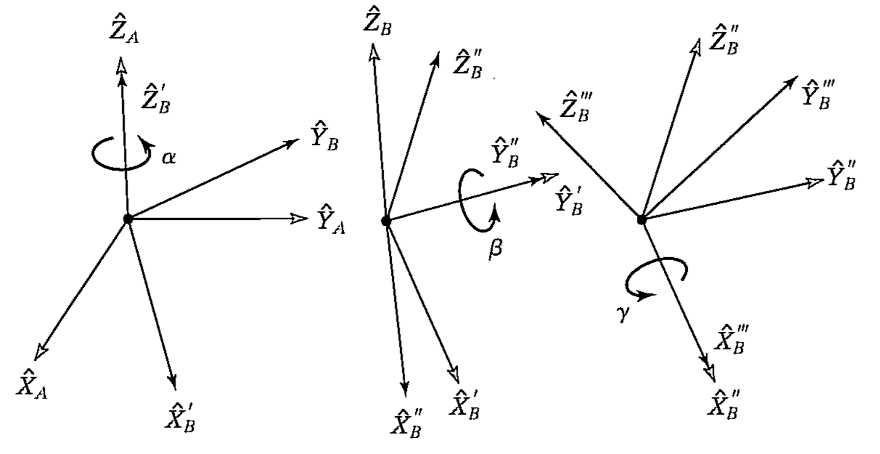
Rainbow Robotics 의 Script 문법 및 표기에서는 아래와 같은 회전 표기법을 사용합니다.
- Z-Y’-X’’ Euler angle (Degree)
2. 수학 함수 및 상수
2.1 v = cos(v)
삼각함수 코사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수 (단위: radian)Return :
v : 코사인 함수 값인 단일 숫자를 return 합니다.
Example :
var my_result = cos(45*D2R) # my_result 에는 0.7071이 저장됩니다.2.2 v = cosd(v)
삼각함수 코사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수 (단위: degree)Return :
v : 코사인 함수 값인 단일 숫자를 return 합니다.
Example :
var my_result = cosd(45) # my_result 에는 0.7071이 저장됩니다.2.3 v = sin(v)
삼각함수 사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수 (단위: radian)Return :
v : 사인 함수 값인 단일 숫자를 return 합니다.
Example :
var my_result = sin(30*D2R) # my_result 에는 0.5가 저장됩니다.2.4 v = sind(v)
삼각함수 사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수 (단위: degree)Return :
v : 사인 함수 값인 단일 숫자를 return 합니다.
Example :
var my_result = sind(30) # my_result 에는 0.5가 저장됩니다.2.5 v = tan(v)
삼각함수 탄젠트 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수 (단위: radian)Return :
v : 탄젠트 함수 값인 단일 숫자를 return 합니다.
Example :
var my_result = tan(45*D2R) # my_result 에는 1이 저장됩니다.2.6 v = tand(v)
삼각함수 탄젠트 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수 (단위: degree)Return :
v : 탄젠트 함수 값인 단일 숫자를 return 합니다.
Example :
var my_result = tand(45) # my_result 에는 1이 저장됩니다.2.7 v = acos(v)
역삼각함수 아크 코사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: radian)
Example :
var my_result = acos(-1) # my_result 에는 원주율 PI가 저장됩니다.2.8 v = acosd(v)
역삼각함수 아크 코사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: degree)
Example :
var my_result = acosd(-1) # my_result 에는 180이 저장됩니다.2.9 v = asin(v)
역삼각함수 아크 사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: radian)
Example :
var my_result = asin(1) # my_result 에는 1.5708이 저장됩니다.2.10 v = asind(v)
역삼각함수 아크 사인 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: degree)
Example :
var my_result = asind(1) # my_result 에는 90이 저장됩니다.2.11 v = atan(v)
역삼각함수 아크 탄젠트 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: radian)
Example :
var my_result = atan(1) # my_result 에는 0.7854가 저장됩니다.2.12 v = atand(v)
역삼각함수 아크 탄젠트 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: degree)
Example :
var my_result = atand(1) # my_result 에는 45가 저장됩니다.2.13 v = atan2(v, v)
역삼각함수 4 사분면 아크 탄젠트 연산 함수 입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: y 방향 variable 또는 상수
v: x 방향 variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: radian)
Example :
var my_result = atan2(1, 1) # my_result 에는 0.7854가 저장됩니다.2.14 v = atan2d(v, v)
역삼각함수 4 사분면 아크 탄젠트 연산 함수 입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: y 방향 variable 또는 상수
v: x 방향 variable 또는 상수Return :
v : 단일 숫자를 return 합니다. (단위: degree)
Example :
var my_result = atan2d(1, 1) # my_result 에는 45가 저장됩니다.2.15 PI
원주율(𝜋)을 나타내는 상수 입니다.
Example :
var my_val = PI # my_val 에는 3.142가 저장됩니다.2.16 R2D
radian 에서 degree 로 변환하기 위한 연산 상수 (180/PI) 입니다.
Example :
var my_val= PI*R2D # my_val 에는 180이 저장됩니다.2.17 D2R
degree 에서 radian 으로 변환하기 위한 연산 상수 (PI/180) 입니다.
Example :
var my_val= 180*D2R # my_val 에는 3.142가 저장됩니다.2.18 v = abs(v)
절대값 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = abs(-5.2) # my_result 에는 5.2가 저장됩니다.2.19 v = sqrt(v)
제곱근 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = sqrt(4) # my_result 에는 2가 저장됩니다.2.20 v = cell(v)
올림 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = cell(4.2) # my_result 에는 5가 저장됩니다.2.21 v = floor(v)
내림 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = floor(4.8) # my_result 에는 4가 저장됩니다.2.22 v = round(v)
반올림 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = round(4.2) # my_result 에는 4가 저장됩니다.
var my_result = round (4.8) # my_result 에는 5가 저장됩니다.2.23 v = log(v)
자연 로그(ln) 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = log(4) # my_result 에는 1.3862가 저장됩니다.2.24 v = log10(v)
상용 로그(log10) 연산 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = log10(3) # my_result 에는 0.4771이 저장됩니다.2.25 v = pow(v, v)
거듭 제곱 연산 함수입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 거듭 제곱의 밑이 되는 variable 또는 상수
v: 거듭 제곱의 지수가 되는 variable 또는 상수Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = pow(2,3) # my_result 에는 8이 저장됩니다.2.26 v = rand()
0 과 1 사이의 균등 분포(uniform distribution)를 따르는 난수 생성 함수입니다.
Input :
없음.Return :
v : 단일 숫자를 return 합니다.
Example :
var my_result = rand() # my_result 에는 0.1315 가 저장됩니다.
var my_result = rand() # my_result 에는 0.7869 가 저장됩니다.
var my_result = rand() # my_result 에는 0.4277 가 저장됩니다.2.27 v = arr_size(a)
입력된 배열 변수의 사이즈를 반환합니다.
Input :
a: target array variable.Return :
v: return single number.
Example :
var my_size
arr my_arr = {1,2,3,4}
my_size = arr_size(my_arr) # my_size= 42.28 a = arr_sub(a, v)
입력된 배열 변수를 첫번째 인덱스부터 주어진 길이 만큼 잘라서 새로운 배열을 만듭니다.
Input :
a: target array variable
v: target sizeReturn :
a: trimmed array
2.29 a = arr_sub(a, v, v)
입력된 배열 변수를 주어진 인덱스부터 주어진 길이 만큼 잘라서 새로운 배열을 만듭니다.
Input :
a: target array variable
v: starting point index
v: target sizeReturn :
a: trimmed array
2.30 a = zyzE_to_zyxE(a), a = xyzE_to_zyxE(a), a = xyxE_to_zyxE(a), a = xzxE_to_zyxE(a), a = yzyE_to_zyxE(a), a = yxyE_to_zyxE(a), a = zxzE_to_zyxE(a)
3by1의 Euler 각도를 3by1의 ZY'X''의 Euler 각도로 변환합니다.
Input :
a: Source Euler angle array (length should be 3)Return :
a: Converted Euler angle array (ZY’X’’) (length = 3)
2.31 a = zyzE_to_R(a), a = xyzE_to_R(a), a = xyxE_to_R(a), a = xzxE_to_R(a), a = yzyE_to_R(a), a = yxyE_to_R(a), a = zxzE_to_R(a), a = zyxE_to_R(a)
3by1의 Euler 각도를 Rotation Matrix로 변환합니다.
Input :
a: Source Euler angle array (length should be 3)Return :
a: Converted Rotation Matrix (length = 9)
2.32 a = RxMat(v), a = RyMat(v), a = RzMat(v)
입력된 각도를 기반으로 Rotation Matrix를 생성합니다. Rx, Ry, Rz는 각 회전 축을 의미합니다.
Input :
v: angle in degree unitReturn :
a: Converted Rotation Matrix (length = 9)
2.33 a = R_TCP
현재 TCP의 Rotation Matrix를 반환합니다.
Input :
None.Return :
a: Converted Rotation Matrix (length = 9)
2.34 a = point_to_R(P, v)
입력된 포인트 변수에서 Rotation Matrix룰 추출합니다.
Input :
P: target Point variable
v: Option- 0 : X,Y,Z,Rx,Ry,Rz Point -> R
- 1 : X,Y,Z,Rz,Ry,Rx Point -> R
Return :
a: Converted Rotation Matrix (length = 9)
2.35 a = Rinverse(a), a = Rtranspose(a)
Rotation Matrix의 Inverse (Transpose)를 구합니다.
Input :
a: Source Rotation Matrix Array (length should be 9)Return :
a: Converted Rotation Matrix (length = 9)
2.36 a = R_x_R(a, a)
Rotation Matrix 곱셈 연산
Input :
a: Source Rotation Matrix Array (length should be 9)
a: Source Rotation Matrix Array (length should be 9)Return :
a: Converted Rotation Matrix (length = 9)
2.37 a = R_x_V(a, a)
Rotation Matrix 와Vector (3by1) 의 곱셈 연산
Input :
a: Source Rotation Matrix Array (length should be 9)
a: Source Vector (length should be 3)Return :
a: Multiplied Vector (length = 3)
2.38 a = R_to_zyxE(a)
Rotation Matrix를 ZY’X’’오일러 각도로 변환합니다.
Input :
a: Source Rotation Matrix Array (length should be 9)Return :
a: Converted Euler angle array (length = 3)
3. 문자열 함수
3.1 v = str_empty(s)
문자열의 데이터 유무를 반환하는 함수입니다.
Input :
하나의 string 또는 문자열을 입력 인자로 가집니다.
s: string 또는 문자열Return :
v : 단일 숫자 0 또는 1을 return 합니다. (데이터가 없을 때 1, 있을 때 0)
Example :
string my_str1 = “rainbow”
string my_str2
var my_result1 = str_empty(my_str1) # my_result1 에는 0이 저장됩니다.
var my_result2 = str_empty(my_str2) # my_result2 에는 1이 저장됩니다.3.2 v = str_find(s, s)
다른 문자열 내에서 문자열을 위치 인덱스를 반환하는 함수입니다.
Input :
두 개의 string 또는 문자열을 입력 인자로 가집니다.
s: 검색 범위가 되는 string 또는 문자열
s: 검색어가 되는 string 또는 문자열Return :
v: 인덱스에 해당하는 단일 숫자를 return 합니다.
: 존재하지 않을 경우 -1 을 return 합니다.
Example :
string my_str1 = “rainbow_robotics”
string my_str2 = “robotics”
var my_result = str_find(my_str1, my_str2) # my_result 에는 8이 저장됩니다.3.3 v = str_len(s)
문자열의 길이를 반환하는 함수입니다.
Input :
하나의 string 또는 문자열을 입력 인자로 가집니다.
s: string 또는 문자열Return :
v: 길이에 해당하는 단일 숫자를 return 합니다.
Example :
string my_str = “rainbow_robotics”
var my_result = str_len(my_str) # my_result 에는 16이 저장됩니다.3.4 s = str_sub(s, v, v)
문자열을 잘라내어 일부를 반환하는 함수입니다.
Input :
하나의 string 또는 문자열과 두 개의 variable 또는 상수를 입력 인자로 가집니다.
s: string 또는 문자열
v: 문자열의 시작 인덱스를 나타내는 variable 또는 상수
v: 문자열의 길이를 나타내는 variable 또는 상수Return :
s: 잘라낸 문자열을 return 합니다.
Example :
string my_str = “rainbow_robotics”
string my_result = str_sub(my_str, 3, 7) # my_result 에는 “nbow_ro”가 저장됩니다.3.5 s = str_cat(s, s)
문자열을 서로 결합하는 함수입니다.
Input :
두 개의 string 또는 문자열을 입력 인자로 가집니다.
s: 왼쪽에 붙이고자 하는 string 또는 문자열
s: 오른쪽에 붙이고자 하는 string 또는 문자열Return :
s: 결합된 문자열을 return 합니다.
Example :
string my_str1 = “hi”
string my_str2 = “rainbow”
string my_res = str_cat(my_str1, my_str2) # my_res 에는 “hirainbow”가 저장됩니다.
# my_res = my_str1 + my_str2 도 지원합니다.3.6 v = str_cmp(s, s)
문자열을 서로 비교하는 함수입니다.
Input :
두 개의 string 또는 문자열을 입력 인자로 가집니다.
s: 기준이 되는 string 또는 문자열
s: 비교하고자 하는 string 또는 문자열Return :
v: 문자열이 동일하면 0, 다르면 0 이 아닌 단일 숫자를 return 합니다.
문자열이 동일하지 않은 경우, 동일하지 않은 첫 번째 문자를 비교해 기준 문자열이 비교 문자열 보다 크면 0 보다 큰 값, 작으면 0 보다 작은 값의 단일 숫자를 return 합니다.
Example :
string my_str1 = “hello”
string my_str2 = “hello”
string my_str3 = “hgello”
string my_str4 = “Hello”
var my_result1 = str_cmp(my_str1, my_str2) # my_result1 에는 0 이 저장됩니다.
var my_result2 = str_cmp(my_str2, my_str3) # my_result2 에는 -2 가 저장됩니다. e(101)와 g(103)를 비교.
var my_result3 = str_cmp(my_str3, my_str2) # my_result3 에는 2 가 저장됩니다. g(103)와 e(101)를 비교.
var my_result4 = str_cmp(my_str1, my_str4) # my_result4 에는 32 가 저장됩니다. h(104) H(72)를 비교.3.7 v = to_num(s)
문자열을 단일 숫자로 변환하는 함수입니다.
Input :
하나의 string 또는 문자열을 입력 인자로 가집니다.
s: string 또는 문자열Return :
v: 문자열에서 변환된 단일 숫자를 return 합니다.
Example :
str my_string = “123.45”
var my_result = to_num(my_string) # my_result 에는 123.45가 저장됩니다.3.8 s = to_str (v), s = to_str (a), s = to_str (P), s = to_str (J)
s = to_str_raw (v), s = to_str_raw (a), s = to_str_raw (P), s = to_str_raw (J)
variable(point, joint)를 문자열로 변환하는 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다. (array 변수, point 변수, joint 변수)
v/a/P/J: variable 또는 상수 (array 변수, point 변수, joint 변수)Return :
s: 문자열을 return 합니다.
Example :
var my_value = 123.45
str my_result = to_str(my_value) # my_result에는 “123.45”가 저장됩니다.
point my_point = {100,200,300,90,0,0}
str my_result = to_str(my_point) # my_result에는 “{100,200,300,90,0,0}”가 저장됩니다.
joint my_joint = {90,0,0,90,0,0}
str my_result = to_str(my_joint) # my_result에는 “{90,0,0,90,0,0}”가 저장됩니다.
point my_point = {100,200,300,90,0,0}
str my_result = to_str_raw(my_point) # my_result에는 “100,200,300,90,0,0”가 저장
joint my_joint = {90,0,0,90,0,0}
str my_result = to_str_raw(my_joint) # my_result에는 “90,0,0,90,0,}”가 저장3.9 s = to_str_int(v)
단일 숫자를 정수 문자열로 변환하는 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: variable 또는 상수Return :
s: 문자열을 return 합니다.
Example :
var my_value = 123.45
str my_result = to_str_int(my_value) # my_result 에는 “123”이 저장됩니다.3.10 a = str_parse(s, s, s, s)
헤더 및 테일이 포함된 문자열을 파싱하여 숫자 배열 형태로 저장합니다.
Input :
s: 소스 문자열 변수 혹은 문자열
s: 헤더 문자열 변수 혹은 문자열
s: 테일 문자열 변수 혹은 문자열
s: 구분자 문자열 변수 혹은 문자열Return :
a: 배열 변수를 return 합니다.
Example :
str my_source_str = “S43,22,31,44,-5”
var my_result = str_parse(my_source_str, “S”, “”, “,”)
# my_result[0] = 5 // number of elements
# my_result[1] = 43, my_result[2] = 22, my_result[3] = 31, my_result[4] = 44, my_result[5] = -5
str my_source_str = “S{43/22/31/44}E”
var my_result = str_parse(my_source_str, “S{”, “}E”, “/”)
# my_result[0] = 4 // number of elements
# my_result[1] = 43, my_result[2] = 22, my_result[3] = 31, my_result[4] = 44
str my_source_str = “-100,200,-300”
var my_result = str_parse(my_source_str, “”, “”, “,”)
# my_result[0] = 3 // number of elements
# my_result[1] = -100, my_result[2] = 200, my_result[3] = -300
str my_source_str = “STX-100$200$-300ETX”
var my_result = str_parse(my_source_str, “STX”, “ETX”, “$”)
# my_result[0] = 3 // number of elements
# my_result[1] = -100, my_result[2] = 200, my_result[3] = -3004. 비트 함수
4.1 v = get_bit(v, v)
variable 또는 상수에서 특정 비트 자리의 비트를 획득하는 함수입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: bit 를 획득하고자 하는 variable/상수
v: 원하는 bit 자리, 비트는 0부터 시작됩니다.Return :
v: 단일 숫자 0 또는 1을 return 합니다.
Example :
var my_bit = get_bit(1234, 3) # my_bit 에는 0 이 저장됩니다.
# 1234 = 0b100110100104.2 set_bit(v, v)
variable 에서 특정 비트 자리의 비트를 1 로 변경하는 함수입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: bit 를 바꾸고자 하는 variable
v: 원하는 bit 자리, 비트는 0 부터 시작됩니다.Return :
없음.
Example :
var my_var = 1234 # 1234 = 0b10011010010
set_bit(my_var, 3) # my_var 에는 1242가 저장됩니다.4.3 clear_bit(v, v)
variable 에서 특정 비트 자리의 비트를 0 으로 변경하는 함수입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: bit 를 바꾸고자 하는 variable
v: 원하는 bit 자리, 비트는 0 부터 시작됩니다.Return :
없음.
Example :
var my_var = 1234 # 1234 = 0b10011010010
clear_bit(my_var, 1) # my_var 에는 1232가 저장됩니다.4.4 <<, >>, &, |
비트 시프트 연산자, 비트 and / or 연산자
비트 시프트 연산 및 논리 연산을 지원합니다.
Example :
Var my_num = 12 # my_num = 0b1100
Var my_num2 = my_num << 2 # my_num2 = 48 (0b110000)5. 시스템 함수
5.1 halt
모든 프로그램 흐름 및 동작을 정지합니다.
Example :
halt5.2 task stop
모든 프로그램 흐름 및 동작을 정지합니다.
Example :
task stop5.3 mc jall init
로봇 팔에 DC 전원을 인가하고, 서보 온을 하여 활성화 시킵니다. (로봇 활성화)
5.4 pgmode real
로봇의 운용 모드를 ‘Real-Robot’으로 전환합니다.
5.5 pgmode simulation
로봇의 운용 모드를 ‘Simulation’으로 전환합니다.
5.6 program_load_and_run(s)
제어박스에 저장된 프로그램을 불러오고 재생까지 수행합니다.
Input :
s: 불러오기 및 재생을 하고자 하는 프로그램 이름을 문자열 형식으로 표기.Return :
None.
Example :
program_load_and_run(“my_project”)
program_load_and_run(“hello_world_v90”)5.7 task load your_project_name
로봇 제어박스에 저장된 프로젝트를 불러옵니다.
Input :
Name of project/program wsl nameReturn :
None.
Example :
task load hello_world
task load my_project_1235.8 task play once
현재 로드 되어있는 프로그램을 재생합니다.
5.9 task stop
프로그램 흐름 및 동작을 완전히 종료합니다.
5.10 task pause
프로그램 및 동작을 일시정지 합니다.
5.11 task resume_a
일시정지 상태에서 흐름을 다시 진행합니다.
5.12 task resume_b
충돌감지 상황에서 멈춘 흐름을 다시 진행합니다.
5.13 v = pattern_get_count(v)
패턴 기능에서 수행 중인 그리드의 현재 인덱스를 획득하는 함수입니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 패턴 번호 (할당된 번호의 확인이 필요합니다.)
: 패턴 고유 번호는 패턴 액션에 설정되어 있습니다.Return :
v: 그리드의 현재 인덱스를 return 합니다.
Example :
var current_count = pattern_get_count(6691) # 패턴 번호 6691의 현재 그리드 인덱스를 획득합니다.5.14 pattern_set_count(v, v)
패턴 기능에서 작업을 수행하는 그리드의 인덱스를 강제로 설정하는 함수입니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 패턴 번호 (할당된 번호의 확인이 필요합니다.)
: 패턴 고유 번호는 패턴 액션에 설정되어 있습니다.
v: 수행하려는 그리드 인덱스
: 만약 패턴이 2 차원 평면 패턴이고, 3x5 = 15 의 그리드 포인트가 있다면, 설정 가능한 인덱스는 0 ~ 14입니다.Return :
없음.
Example :
pattern_set_count(6691, 3) # 패턴 번호 6691의 그리드 인덱스를 3으로 설정합니다.5.15 P = calc_fk_tcp(v, v, v, v, v, v), P = calc_fk_tcp(J)
주어진 관절 정보로, TCP 의 직교 좌표 값을 연산합니다.
Input type 1:
여섯 개의 variable 또는 상수를 입력 인자로 가집니다.
v, v, v, v, v, v: 각 관절 각도 (단위: Degree)Input type 2:
J: 각 관절 정보 (joint 타입 변수)Return :
P: 베이스 좌표계를 기준으로 TCP 의 직교 좌표 값을 return 합니다.
Example :
joint my_joint = {0,0,0,0,0,0}
point my_result = calc_fk_tcp(my_joint) # my_result 에는 {0, -207.62,1100.59,0,0,0}가 저장됩니다.
# TCP 를 변경하면 예제와 다르게 출력될 수 있습니다.
point my_result = calc_fk_tcp(0,0,0,0,0,0) # 위와 동일한 동작을 수행합니다.5.16 P = calc_fk_tfc(v, v, v, v, v, v), P = calc_fk_tfc(J)
주어진 관절 정보로, 툴 플랜지 중심점 (TFC, Tool Flange Center)의 직교 좌표 값을 연산합니다.
※ 툴 플랜지는 로봇에 그리퍼/툴이 장착되는 부분입니다.
Input type 1:
여섯개의 variable 또는 상수를 입력인자로 가집니다.
v, v, v, v, v, v: 각 관절 정보Input type 2:
J: 각 관절 정보 (joint 타입 변수)Return :
P: 베이스 좌표계를 기준으로 TFC 의 직교 좌표 값을 return 합니다.
Example :
joint my_joint = {0,0,0,0,0,0}
point my_result = calc_fk_tfc(my_joint) # my_result 에는 {0, -207.62,1100.59,0,0,0}가 저장됩니다.
point my_result = calc_fk_tfc(0,0,0,0,0,0) # 위와 동일한 동작을 수행합니다.5.17 v = point_dist(P, P)
두 점 사이의 거리를 연산하는 함수입니다.
Input :
두 개의 point 를 입력 인자로 가집니다.
P: 거리를 계산하고자 하는 point 1
P: 거리를 계산하고자 하는 point 2Return :
v: 두 점 사이의 거리 값인 단일 숫자를 return 합니다.
Example :
point my_ptr1 = {100, 200, 300, 0, 0, 0}
point my_ptr2 = {100, 200, 200, 0, 0, 0}
var my_result = point_dist(my_ptr1, my_ptr2) # my_result 에는 100 이 저장됩니다.5.18 P = point_add(P, P)
두 점의 덧셈을 연산하는 함수입니다.
Input :
두 개의 point 를 입력 인자로 가집니다.
P: 덧셈을 수행하고자 하는 point 1
P: 덧셈을 수행하고자 하는 point 2Return :
v: 두 점의 덧셈 연산 결과 값인 point 를 return 합니다.
Example :
point my_ptr1 = {100, 0, 300, 150, 0, 30}
point my_ptr2 = {100, 200, 300, 90, 0, 90}
point my_result = point_add(my_ptr1, my_ptr2)
# my_result 에는 {200, 200, 600, -90, -30, -60}이 저장됩니다.
# x,y,z 거리 값들은 단순 산술 연산으로 처리됩니다.
# Rx,Ry,Rz 회전 값들은 회전 행렬 연산으로 처리됩니다.5.19 P = point_sub(P, P)
두 점의 뺄셈을 연산하는 함수입니다.
Input :
두 개의 point 를 입력 인자로 가집니다.
P: 뺄셈을 수행하고자 하는 point 1
P: 뺄셈을 수행하고자 하는 point 2Return :
v: 두 점의 뺄셈 연산 결과 값인 point 를 return 합니다.
Example :
point my_ptr1 = {100, 0, 300, 150, 0, 30}
point my_ptr2 = {100, 200, 300, 90, 0, 90}
point my_result = point_sub(my_ptr1, my_ptr2)
# my_result 에는 {0, -200, 0, 0, 60, -60}이 저장됩니다.
# x,y,z 거리 값들은 단순 산술 연산으로 처리됩니다.
# Rx,Ry,Rz 회전 값들은 회전 행렬 연산으로 처리됩니다.5.20 P = point_mid(P, P)
두 점 사이의 중점을 연산하는 함수입니다.
Input :
두 개의 point 를 입력 인자로 가집니다.
P: 중점을 구하고자 하는 point 1
P: 중점을 구하고자 하는 point 2Return :
P: 두 점 사이의 중점인 point 를 return 합니다.
Example :
point my_ptr1 = {100, 0, 300, 150, 0, 30}
point my_ptr2 = {100, 200, 300, 90, 0, 90}
point my_result = point_mid(my_ptr1, my_ptr2)
# my_result 에는 {100, 100, 300, 120, -8.21, 60}이 저장됩니다.
# x,y,z 거리 값들은 단순 산술 연산으로 처리됩니다.
# Rx,Ry,Rz 회전 값들은 회전 행렬 연산으로 처리됩니다.5.21 P = point_interpolate(P, P, v)
두 점 사이의 보간 점을 연산하는 함수입니다.
Input :
두 개의 point, 하나의 variable 또는 상수를 입력 인자로 가집니다.
P: 보간 하고자 하는 point 1
P: 보간 하자고 하는 point 2
v: 보간에 이용할 점의 가중치 (0 에서 1 사이의 값)Return :
두 점 사이의 보간 결과인 point 를 return 합니다.
Example :
point my_ptr1 = {100, 0, 300, 150, 0, 30}
point my_ptr2 = {100, 200, 300, 90, 0, 90}
point my_result = point_interpolate(my_ptr1, my_ptr2, 0.1)
# my_result 에는 {100, 20, 300, 144.43, -2.86, 35.37}이 저장됩니다.
# x,y,z 거리 값들은 단순 산술 연산으로 처리됩니다.
# Rx,Ry,Rz 회전 값들은 회전 행렬 연산으로 처리됩니다.5.22 P = point_trans_g2u(P, v)
글로벌 좌표계에서 사용자 정의 좌표계로 변환을 수행하는 함수입니다.
Input :
하나의 point, 하나의 variable 또는 상수를 입력 인자로 가집니다.
P: 변환하고자 하는 point
v: 사용자 좌표계 번호 (사용자 좌표계: 0, 1, 2)Return :
P: 글로벌 좌표계에서 사용자 정의 좌표계로 변환된 point 좌표 값을 return 합니다.
Example :
point my_global_p
point my_local_p = point_trans_g2u(my_global_p, 0)5.23 P = point_trans_u2g(P, v)
사용자 정의 좌표계에서 글로벌 좌표계로 변환을 수행하는 함수입니다.
Input :
하나의 point, 하나의 variable 또는 상수를 입력 인자로 가집니다.
P: 변환하고자 하는 point
v: 사용자 좌표계 번호 (사용자 좌표계 : 0, 1, 2)Return :
P: 사용자 정의 좌표계에서 글로벌 좌표계로 변환된 point 좌표 값을 return 합니다.
Example :
point my_local_p
point my_global_p = point_trans_u2g(my_local_p, 0)5.24 P = get_tcp_info()
현재 로봇의 TCP 정보를 획득하는 함수입니다.
Input :
없음.Return :
P: 직교 좌표계 기준 현재 로봇의 TCP 를 return 합니다. (단위: mm & degree)
Example :
point my_result = get_tcp_info() # my_result 에는 현재 TCP 정보가 저장됩니다.5.25 P = get_tfc_info()
현재 로봇의 툴 플랜지 중심 정보를 획득하는 함수입니다.
Input :
없음.Return :
P: 직교 좌표계 기준 현재 로봇의 툴 플랜지 중심을 return 합니다. (단위: mm & degree)
Example :
point my_result = get_tfc_info() # my_result 에는 현재 툴 플랜지 중심 정보가 저장됩니다.5.26 J = joint_add(J, J)
두 관절의 덧셈을 연산하는 함수입니다.
Input :
두 개의 joint 를 입력 인자로 가집니다.
J: 덧셈을 수행하고자 하는 joint 1
J: 덧셈을 수행하고자 하는 joint 2Return :
J: 두 관절의 덧셈 연산 결과 값인 joint 를 return 합니다.
Example :
joint my_joint1 = {45, 15, 0, 0, 0, 90}
joint my_joint2 = {0, 45, 45, 15, 0, 0}
joint my_result = joint_add(my_joint1, my_joint2) # my_result 에는 {45,60,45,15,0,90}이 저장됩니다.5.27 J = joint_sub(J, J)
두 관절의 뺄셈을 연산하는 함수입니다.
Input :
두 개의 joint 를 입력 인자로 가집니다.
J: 뺄셈을 수행하고자 하는 joint 1
J: 뺄셈을 수행하고자 하는 joint 2Return :
J: 두 관절의 뺄셈 연산 결과 값인 joint 를 return 합니다.
Example :
joint my_joint1 = {45, 15, 0, 0, 0, 90}
joint my_joint2 = {0, 45, 45, 15, 0, 0}
joint my_result = joint_sub(my_joint1, my_joint2) # my_result 에는 {45,-30,-45,-15,0,90}이 저장됩니다.5.28 J = joint_mid(J, J)
두 관절 사이의 중간 관절을 연산하는 함수입니다.
Input :
두 개의 joint 를 입력 인자로 가집니다.
J: 중간 관절 구하고자 joint 1
J: 중간 관절 구하고자 joint 2Return :
J: 두 관절의 중간 관절 연산 결과 값인 joint 를 return 합니다.
Example :
joint my_joint1 = {45, 15, 0, 15, 0, 90}
joint my_joint2 = {45, 15, 0, 15, 0, 0}
joint my_result = joint_mid(my_joint1, my_joint2) # my_result 에는 {45, 15, 0, 15, 0, 45}이 저장됩니다.5.29 J = joint_interpolate(J, J, v)
두 관절 사이의 보간 관절을 연산하는 함수입니다.
Input :
두 개의 joint, 하나의 variable 또는 상수를 입력 인자로 가집니다.
J: 보간 관절 구하고자 joint 1
J: 보간 관절 구하고자 joint 2
v: 보간에 이용할 관절의 가중치 (0 에서 1 사이의 값)Return :
J: 두 관절의 보간 관절 연산 결과 값인 joint 를 return 합니다.
Example :
joint my_joint1 = {45, 15, 0, 15, 0, 90}
joint my_joint2 = {45, 15, 0, 15, 0, 0}
joint my_result = joint_interpolate(my_joint1, my_joint2, 0.1)
# my_result 에는 {45, 15, 0, 15, 0, 81}이 저장됩니다.5.30 J = get_joint_info()
관절 각도 정보를 획득합니다.
Input :
없음.Return :
J: 관절 좌표계 기준 현재 로봇의 관절 정보를 return 합니다. (단위: degree)
Example :
joint my_result = get_joint_info() # my_result 에는 현재 관절 각도 정보가 저장됩니다.5.31 set_payload_info(v, v, v, v)
툴 payload 를 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
네 개의 variable 또는 상수를 입력 인자로 가집니다.
v: payload 무게 (단위: kg)
v: payload 무게중심의 x 좌표 (단위: mm)
v: payload 무게중심의 y 좌표 (단위: mm)
v: payload 무게중심의 z 좌표 (단위: mm)- 입력되는 3 개의 값들은 제조사 기본 툴 좌표계를 기준으로 합니다.
Return :
없음.
Example :
set_payload_info(3, 0, -50, 0) # payload 의 무게는 3kg, 무게 중심은 0mm,-50mm, 0mm 으로 설정합니다.5.32 set_tcp_info(v, v, v, v, v, v)
로봇 말단(TCP) 위치 및 회전을 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
여섯 개의 variable 또는 상수를 입력 인자로 가집니다.
v: TCP 의 x 좌표 (단위: mm)
v: TCP 의 y 좌표 (단위: mm)
v: TCP 의 z 좌표 (단위: mm)
v: TCP 의 Rx 각도 (단위: degree)
v: TCP 의 Ry 각도 (단위: degree)
v: TCP 의 Rz 각도 (단위: degree)- 입력되는 6개의 값들은 제조사 기본 툴 좌표계를 기준으로 합니다.
Return :
없음.
Example :
set_tcp_info(0, -100, 0, 0, 0, 0) # TCP 의 위치가 기본 툴 좌표계 대비 y로 -100mm에 있다고 설정합니다.5.33 set_collision_onoff(v)
충돌 감지 기능을 on/off 하는 함수입니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 0 이면 off, 1 이면 on.Return :
없음.
Example :
set_collision_onoff(1) # 충돌 감지 기능을 사용합니다.5.34 set_collision_th(v)
충돌 감도를 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 충돌 감도로 0 에서 1 사이의 값. 낮은 값일수록 약한 충격에 민감함. (0~1)Return :
없음.
Example :
set_collision_th(0.1) # 충돌 감도를 10%로 설정합니다.5.35 set_collision_mode(v)
충돌 후 정지 모드를 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 정지 모드.- 0 = 제자리 정지(General Stop)
- 1 = 회피 정지(Evasion Stop)
Return :
없음.
Example :
set_collision_mode(1)
# 충돌 감지 후, 외부 힘을 피하는 방향으로 로봇이 조금 이동 후 궤적 움직임을 정지합니다.5.36 set_collision_after(v)
충돌 후 정지 모드 시 프로그램 흐름을 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 정지 모드.- 0 = 프로그램 흐름 일시 정지 (Pause) (기본값)
- 1 = 프로그램 흐름 정지/종료 (Stop / Halt)
Return :
없음.
Example :
set_collision_after(1) # 외부 충돌 감지 후 프로그램 흐름이 정지(종료) 됩니다.5.37 set_speed_multiply(v)
전체 속도 배율 기능을 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 배율 설정 (0 에서 2 사이의 값) (기본값: 1)Return :
없음.
Example :
var speed_override = 1.5
set_speed_multiply(speed_override) # 현재 설정한 속도에 1.5배 하여 속도를 설정합니다.5.38 set_acc_multiply(v)
전체 가속도 배율 기능을 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 배율 설정 (0 에서 2 사이의 값) (기본값: 1)Return :
없음.
Example :
var acc_override = 0.5
set_acc_multiply(acc_override) # 현재 설정한 가속도에 0.5배 하여 가속도를 설정합니다.5.39 set_speed_acc_j(v, v)
J 계열 동작(Move J, Move JB, Move JL)의 고정된 관절 속도/가속도를 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 속도 (단위: 𝒅𝒆𝒈/𝒔)
음수 입력 시, 속도를 고정하지 않습니다.
v: 가속도 (단위: 𝒅𝒆𝒈/𝒔𝟐)
음수 입력 시, 가속도를 고정하지 않습니다.Return :
없음.
Example :
set_speed_acc_j(10, 3) # Move 의 point 마다 설정된 속도/가속도를 무시하고,
# 속도 10𝑑𝑒𝑔/𝑠, 가속도 3𝑑𝑒𝑔/𝑠2 로 동작합니다.
set_speed_acc_j(-1, 5) # Move 의 point 마다 설정된 속도만 이용하고,
# 가속도는 5𝑑𝑒𝑔/𝑠2 로 동작합니다.5.40 set_speed_acc_l(v, v)
L 계열 동작(Move L, Move PB, Move LB, Move ITPL)의 선형 속도/가속도를 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 속도 (단위: 𝒎𝒎/𝒔)
음수 입력 시, 속도를 고정하지 않습니다.
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐)
음수 입력 시, 가속도를 고정하지 않습니다.Return :
없음.
Example :
set_speed_acc_l(15, 5) # Move 의 point 마다 설정된 속도/가속도를 무시하고,
# 속도 15𝑚𝑚/𝑠, 가속도 5𝑚𝑚/𝑠2 로 동작합니다.
set_speed_acc_l(5, -1) # Move 의 point 마다 설정된 가속도만 이용하고,
# 속도는 5𝑚𝑚/𝑠 로 동작합니다.5.41 set_speed_bar(v)
전체 속도 조절 바를 설정합니다. (UI 하단의 속도 조절 바)
주의
- UI Make 페이지에서 프로그램 구동 시, 안전슬라이드 바 옵션이 켜져 있을 경우 이 함수는 작동하지 않습니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 속도 제어 바 위치 (0 에서 1 사이의 값)Return :
없음.
Example :
set_speed_bar(0.5) # 속도 제어 바를 50%로 설정합니다.5.42 set_box_dout(v, v)
제어 박스의 디지털 출력을 설정합니다.
Input :
두 개의 variable 변수 또는 상수를 입력 인자로 가집니다.
v: 제어 박스의 디지털 출력 포트 번호 (0 ~ 15번)
v: 디지털 출력 동작 (-1 = Bypass, 0 = Low, 1 = High)Return :
없음.
Example :
set_box_dout(0, 0) # 0번 포트에서 low 출력
set_box_dout(0, -1) # 0번 포트에서 low 유지
set_box_dout(0, 1) # 0번 포트에서 high 출력
set_box_dout(0, -1) # 0번 포트에서 high 유지5.43 set_box_aout(v, v)
제어 박스의 아날로그 출력을 설정합니다.
Input :
두 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 제어 박스의 아날로그 출력 포트 번호 (0 ~ 3번)
v: 아날로그 출력 전압 (0 ~ 10V)Return :
없음.
Example :
set_box_aout(3, 7) # 3번 포트에서 7V를 출력합니다.5.44 set_box_dout_toggle(v)
제어 박스의 현재 디지털 출력을 토글하여 설정합니다.
Input :
하나의 variable 또는 상수를 입력 인자로 가집니다.
v: 제어 박스의 디지털 출력 포트 번호 (0 ~ 15번)Return :
없음.
Example :
set_box_dout (1, 1) # 1번 포트에서 high 출력
set_box_dout_toggle (1) # 1번 포트를 토글하여 low 출력
repeat (1 times){ # 3번 포트 1초마다 깜빡
set_box_dout_toggle(3)
wait (1 sec)
}5.45 set_serial_tool(v, v, v)
로봇의 툴 플랜지에서 제공되는 serial 통신 (RS232/485)을 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
세 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 통신 속도(Baud rate)
v: 스탑 비트(Stop bit), (0 or 1, 권장 1)
v: 패리티 비트(Parity bit), (0 : none, 1 : odd, 2 : even, 권장 0)Return :
없음.
Example :
set_serial_tool(115200, 1, 0)
# 툴플랜지 serial 통신 속도는 115200bps, 스탑 비트는 1, 패리티 비트는 none 으로 설정합니다.5.46 set_serial_box(v, v, v)
제어 박스에서 제공되는 serial 통신 (RS232/485)을 설정합니다.
주의
- 이 함수에서 설정된 값은 프로그램 종료 후, 기본 값으로 돌아옵니다.
- 이 함수를 별도로 호출하지 않을 경우, Setup 페이지에서 설정한 값이 사용됩니다.
- 프로그램 흐름 중, 다시 이 함수가 호출되기 전까지 이 함수에서 설정된 값이 유지됩니다.
Input :
세 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 통신 속도(Baud rate)
v: 스탑 비트(Stop bit), (0 or 1, 권장 1)
v: 패리티 비트(Parity bit), (0 : none, 1 : odd, 2 : even, 권장 0)Return :
없음.
Example :
set_serial_box(9600, 1, 0)
# 제어박스와 serial 통신 속도는 9600bps, 스탑 비트는 1, 패리티 비트는 none 으로 설정합니다.5.47 arm_powerdown()
로봇 팔 전력 공금을 중단합니다.
주의
- 로봇 팔의 전원이 내려 갑니다. 사용에 주의하세요. 제어 박스는 꺼지지 않습니다.
Input :
없음.Return :
없음.
Example :
arm_powerdown() # 에러 메시지와 함께 로봇 팔이 정지합니다.5.48 freedrive_teach_on()
직접 교시 모드를 켭니다.
주의
- 본 함수를 수행 시 로봇 팔의 제어 모드가 변경됩니다. 주의하여 사용하세요.
5.49 freedrive_teach_off()
직접 교시 모드를 종료합니다.
주의
- 본 함수를 수행 시 로봇 팔의 제어 모드가 변경됩니다. 주의하여 사용하세요.
5.50 db_write(s, v)
DataBase에 숫자 값을 저장합니다.
Input :
s: name of database
v: target value for writing.Return :
None.
Example :
db_write(“my_data”, 1)5.51 db_write(s, s)
DataBase에 문자열을 저장합니다.
Input :
s: name of database
s: target value for writing.Return :
None.
Example :
db_write(“my_name”, “rainbow”)5.52 v = db_read(s), s = db_read(s)
DataBase로부터 숫자 혹은 문자열을 읽어옵니다.
Input :
s: name of databaseReturn :
Variable or String
Example :
var saved_value
str saved_name
saved_valued = db_read(“my_data”)
saved_name = db_read(“my_name”)5.53 jump_to(v)
특정 주소 값까지 프로그램 실행을 하지 않습니다.
Input :
하나의 주소 값 숫자를 입력으로 받습니다.
v: 주소 값 (0~99999)Return :
None.
Example :
# jump_here(1234)가 등장하는 지점까지 프로그램 흐름을 뛰어 넘습니다.
jump_to(1234)5.54 jump_here(v)
해당 시점부터 다시 프로그램을 수행합니다.
주의
- 본 함수는 프로그램 최 상단 라인 (왼쪽)에 위치해야 합니다.
Input :
하나의 주소 값 숫자를 입력으로 받습니다.
v: 주소 값 (0~99999)Return :
없음.
Example :
# 아래의 예시에서 가운데 두 wait 줄은 무시 됩니다.
jump_to(1234)
wait (1.0 sec)
wait (2.0 sec)
jump_here(1234)5.55 jump_to_line(v)
특정 라인 (줄) 까지 이동합니다.
Input :
하나의 라인 줄 번호를 입력으로 받습니다.
v: 줄 번호 (0~99999)- 줄 번호는 프로그램 최 상단 라인 (왼쪽)의 번호 입니다.
- Begin은 0번줄, 그 아래는 1번줄 , 순으로 번호가 매겨집니다.
Return :
없음.
Example :
# 줄 번호 2라인 으로 이동합니다.
jump_to_line(2)5.56 jump_to_begin()
첫 시작 점까지 이동합니다. jump_to_line(0)과 같은 효과 입니다.
Input :
없음.Return :
없음.
Example :
# 프로그램 첫 줄로 이동합니다.
jump_to_begin()6. 시스템 변수
6.1 SD_TIME
SD_TIME
SD_TIMER_0, SD_TIMER_1, …, SD_TIMER_9
시간을 나타내는 변수입니다.
Set 기능에서 원하는 값으로 변경 가능합니다.
타이머 기능으로 사용됩니다.
프로그램 시간 흐름에 따라 자동으로 시간이 증가합니다.
6.2 SD_J#_REF
SD_J0_REF
SD_J1_REF
SD_J2_REF
SD_J3_REF
SD_J4_REF
SD_J5_REF
관절 지령 각도를 나타내는 변수입니다. (단위: degree)
6.3 SD_J#_ANG
SD_J0_ANG
SD_J1_ANG
SD_J2_ANG
SD_J3_ANG
SD_J4_ANG
SD_J5_ANG
관절 엔코더 각도를 나타내는 변수입니다. (단위: degree)
6.4 SD_J#_CUR
SD_J0_CUR
SD_J1_CUR
SD_J2_CUR
SD_J3_CUR
SD_J4_CUR
SD_J5_CUR
관절 전류 값을 나타내는 변수입니다. (단위: A)
6.5 SD_BEGIN_J#
SD_BEGIN_J0
SD_BEGIN_J1
SD_BEGIN_J2
SD_BEGIN_J3
SD_BEGIN_J4
SD_BEGIN_J5
Begin 에서 설정한 관절 각도를 나타내는 변수입니다. (단위: degree)
6.6 SD_TEMPERATURE_MC#
SD_TEMPERATURE_MC0
SD_TEMPERATURE_MC1
SD_TEMPERATURE_MC2
SD_TEMPERATURE_MC3
SD_TEMPERATURE_MC4
SD_TEMPERATURE_MC5
관절 온도를 나타내는 변수입니다. (단위: celsius)
6.7 SD_TCP_X
SD_TCP_X
SD_TCP_Y
SD_TCP_Z
SD_TCP_RX
SD_TCP_RY
SD_TCP_RZ
TCP 기준 현재 직교 좌표계에서의 위치를 나타내는 변수입니다.
6.8 SD_DEFAULT_SPEED
기본 속도 배율을 나타내는 변수입니다. UI 속도 조절 바 값이 0~1 사이로 표기 됩니다.
6.9 SD_ROBOT_STATE
로봇 동작 명령 수행 중 여부를 나타냅니다.
- 1 = Idle
- 3 = Moving
6.10 SD_POWER_STATE
제어 박스의 파워 관리 정보를 비트 단위로 가지고 있습니다.
- SD_POWER_STATE >> 0 & 0x01 : 48V SMPS 작동 여부
- SD_POWER_STATE >> 1 & 0x01 : 파워 스위칭 회로 작동 정보
- SD_POWER_STATE >> 2 & 0x01 : 24V SMPS 작동 여부
- SD_POWER_STATE >> 3 & 0x01 : 48V 스위치 라인 여부
- SD_POWER_STATE >> 4 & 0x01 : PC 파워 스위칭 작동 여부
- SD_POWER_STATE >> 5 & 0x01 : 비상정지 스위치 작동 여부
6.11 SD_COLLISION_DETECT_STATE
외부 충돌 감지 기능 on/off 여부
- 0 = 외부 충돌 감지 off 설정 상태
- 1 = 외부 충돌 감지 on 설정 상태
6.12 SD_IS_FREE_DRIVE_MODE
직접 교시 사용 여부
- 0 = 직접 교시 off
- 1 = 직접 교시 on
6.13 SD_PG_MODE
로봇의 동작 모드를 나타내는 변수입니다.
- 0 = 리얼 모드
- 1 = 시뮬레이션 모드
6.14 SD_INIT_STATE_INFO
로봇의 활성화 단계 정보를 나타내는 시스템 변수입니다.
6.15 SD_INIT_ERR
로봇의 활성화 에러 정보를 나타내는 시스템 변수입니다.
6.16 SD_TFB_ANALOG_IN_#
SD_TFB_ANALOG_IN_0
SD_TFB_ANALOG_IN_1
툴 플랜지 보드(TFB)의 아날로그 입력 포트 2개의 아날로그 값 (0 ~ 10V)을 가진 변수입니다.
6.17 SD_TFB_DIGITAL_IN_#
SD_TFB_DIGITAL_IN_0
SD_TFB_DIGITAL_IN_1
툴 플랜지 보드(TFB)의 디지털 입력 포트 2개의 디지털 값 (0 또는 1)을 가진 변수입니다.
6.18 SD_TFB_DIGITAL_OUT_#
SD_TFB_DIGITAL_OUT_0
SD_TFB_DIGITAL_OUT_1
툴 플랜지 보드(TFB)의 디지털 출력 포트 2개의 출력 값 (0 또는 1)을 가진 변수입니다.
6.19 SD_TFB_VOLTAGE_OUT
툴 플랜지 보드(TFB)의 전압 출력 정보 (0 or 12 or 24V)를 나타내는 변수입니다.
6.20 SD_OP_STAT_COLLISION_OCCUR
충돌이 발생했는지 나타내는 변수입니다.
- 0 = Idle
- 1 = 외부 충돌 발생
6.21 SD_OP_STAT_SOS_FLAG
제어 박스 전원 문제 / 로봇 관절 제어기 / 기타 문제가 발생했는지 나타내는 변수입니다.
- 0 = Idle
6.22 SD_OP_STAT_SELF_COLLISION
로봇 동작 중 자가 충돌 직전을 나타내는 변수입니다.
- 0 = Idle
- 1 = 자가 충돌 범위 진입
6.23 SD_OP_STAT_ESTOP_OCCUR
프로그램 / 로봇의 일시정지 상태 여부를 나타내는 변수입니다.
- 0 = Idle
- 1 = 일시 정지 상태
6.24 SD_OP_STAT_EMS_FLAG
로봇 제어 알고리즘 상의 솔루션이 없는 입력이 들어왔을 때를 나타내는 변수입니다.
- 0 = Idle
6.25 SD_DIGITAL_IN_CONFIG_#
SD_DIGITAL_IN_CONFIG_0
SD_DIGITAL_IN_CONFIG_1
보호 정지 단자 두 개의 정보를 나타냅니다. (Din 16/17)
6.26 SD_INBOX_TRAP_FLAG_#
SD_INBOX_TRAP_FLAG_0
SD_INBOX_TRAP_FLAG_1
로봇의 특정 부위가 특정 영역(Inbox)내에 들어왔는지 확인하는 변수입니다.
6.27 SD_INBOX_CHECK_MODE_#
SD_INBOX_CHECK_MODE_0
SD_INBOX_CHECK_MODE_1
Inbox 체크 모드에 대한 변수입니다.
- 0: No checking
- 1: Check Tool Flange Center (로봇 팔 말단의 툴 플랜지 중심이 특정 영역에 들어왔는지)
- 2: Check Tool Center Point (로봇 팔 말단의 설정된 TCP 가 특정 영역에 들어왔는지)
- 3: Check Tool Box (로봇 팔 말단에 가상으로 설정한 Box 가 특정 영역에 들어왔는지)
- 4: Check All (1,2,3 중에 하나라도 들어온 경우)
6.28 SD_SOCK_IS_OPEN_#
SD_SOCK_IS_OPEN_0
SD_SOCK_IS_OPEN_1
SD_SOCK_IS_OPEN_2
SD_SOCK_IS_OPEN_3
SD_SOCK_IS_OPEN_4
해당 번호의 소켓이 정상으로 open 되었는지, 서버와 정상 연결되었는지 여부를 나타내는 변수입니다. (소켓 번호 : 0~4)
6.29 SD_SOCK_LAST_READ_#
SD_SOCK_LAST_READ_0
SD_SOCK_LAST_READ_1
SD_SOCK_LAST_READ_2
SD_SOCK_LAST_READ_3
SD_SOCK_LAST_READ_4
해당 번호의 소켓으로 read 기능이 정상적으로 수행되었는지 여부를 나타내는 변수입니다 (소켓 번호 : 0~4)
6.30 SD_HAND_TOKTOK
로봇 외부로부터 톡톡 치는 행위가 발생되었는지 여부를 나타내는 변수입니다.
6.31 SD_FINISH_AT_EVENT
로봇의 동작 탈출 조건 방식으로 동작이 끝났는지 여부를 저장합니다.
만약 동작 목표 지점까지 도달해서 동작이 끝난 것이라면 이 변수는 0, 만약 FinishAt 조건이 만족되어 동작이 끝난 것이라면 이 변수는 1 이 됩니다.
6.32 SD_TCP_VEL_REF
현재 TCP 의 지령 선형 속도를 나타내는 변수입니다.
6.33 SD_MOTION_TIME
단위 동작의 시간을 저장하는 변수입니다. 다음 동작이 실행되면 다시 0부터 시작됩니다.
6.34 SD_ARM_POWER
로봇이 사용중인 파워를 나타내는 변수입니다.
6.35 SD_IS_TPU_CONNECT
TPU 티칭 팬던트 유닛 태블릿 PC 의 연결 여부를 알려주는 변수입니다.
6.36 SD_IS_RUN_IN_MAKE
현재 프로그램 운용이 Make 페이지에서 실행된 것이면 1이 저장됩니다.
6.37 SD_IS_RUN_IN_PLAY
현재 프로그램 운용이 Play 페이지에서 실행된 것이면 1이 저장됩니다.
6.38 SD_IS_INTENDED_STOP
사용자가 의도한 정지인지 나타내는 변수입니다.
6.39 SD_MOVE_INDEX
Move PB / ITPL 등의 연속 동작에서 어느 지점을 통과 중 인지 번호를 알려줍니다.
7. 동작 함수
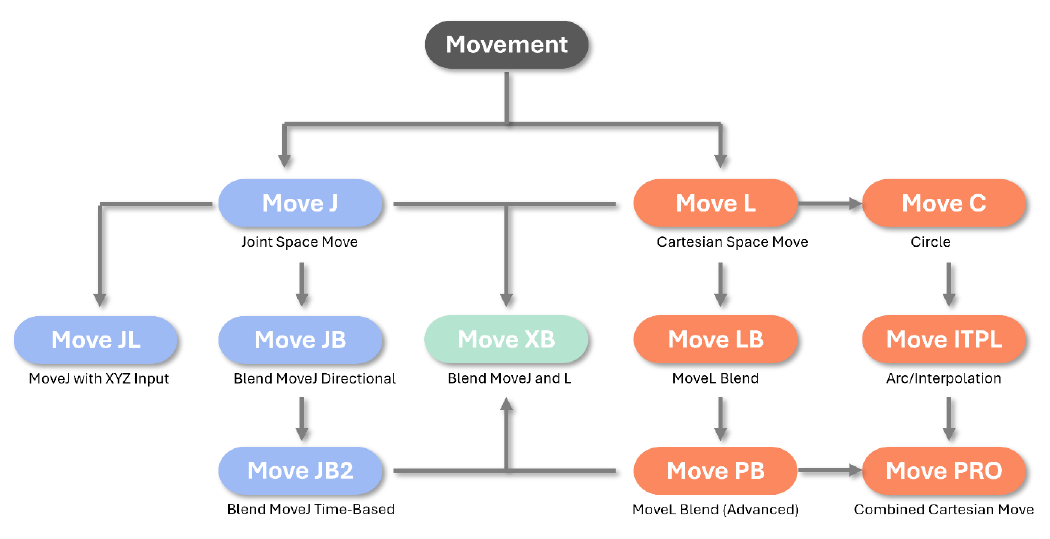
Pre-Defined Motion Primitives
- Move J
- Move L
- Move JB
- Move JB2
- Move LB
- Move PB
- Move ITPL
- Move PRO
- Move XB
- Move Circle
User-Generate-RT Motion
- Servo J
- Servo L
- Servo T
- Speed J
- Speed L
7.1 move_finish_wait()
현재 수행 중인 동작이 완료될 때까지 기다리는 함수입니다.
Input :
없음.Return :
없음.
Example :
# Move L 방식으로 my_destination 까지 움직임이 완료될 때까지 기다립니다.
point my_destination = {100,200,300,0,0,0}
move_l(my_destination, 20, 5, 0)
move_finish_wait()7.2 move_l(P, v, v, v=1)
TCP 가 목표 지점까지 직선으로 이동하는 함수입니다.
Input :
하나의 point, 세 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표 TCP 자세
v: 속도 (𝒎𝒎/𝒔)
v: 가속도 (𝒎𝒎/𝒔𝟐)
v: Wait flag (기본값: 1)- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,300,0,0,0}
point my_point2= {100,150,100,0,90,0}
move_l(my_point1, 20, 5) # Move L 방식으로 my_point1 까지 움직입니다.
move_l(my_point2, 20, 5) # Move L 방식으로 my_point2 까지 움직입니다.7.3 move_l_rel(P, v, v, v, v=1)
TCP 가 목표 지점까지 직선으로 이동하는 함수입니다. 목표 지점은 현재 TCP 값에 대한 상대 값으로 입력합니다.
Input :
하나의 point, 네 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 현재 TCP 에서 상대 이동할 TCP 량
v: 속도 (𝒎𝒎/𝒔)
v: 가속도 (𝒎𝒎/𝒔𝟐)
v: 상대 이동의 기준 좌표계0: 베이스 좌표계
1: 툴 좌표계
2: 사용자 좌표계 0
3: 사용자 좌표계 1
4: 사용자 좌표계 2
v: Wait flag (기본값: 1)
0 = 기다리지 않음.
1 = 동작 완료를 기다림.
Return :
없음.
Example :
# Base 좌표계 기준 y 로 100 z 로 -200 보내고 싶을 경우, 속도는 300mm/s 가속도는 400mm/ss
move_l_rel(pnt[0,100,-200,0,0,0], 300, 400, 0)
# 사용자 좌표계 2 기준 x 로 50 보내고 싶을 경우 (속도/가속도는 100 / 300)
move_l_rel(pnt[50,0,0,0,0,0], 100, 300, 4)7.4 move_j(J, v, v, v=1)
관절의 목표 지점까지 이동하는 함수입니다.
Input :
하나의 joint, 세 개의 variable 또는 상수를 입력 인자로 가집니다.
J: 관절의 목표 지점
v: 속도 (단위: 𝒅𝒆𝒈/𝒔)
v: 가속도 (단위: 𝒅𝒆𝒈/𝒔𝟐)
v: Wait flag (기본값: 1)- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
move_j (jnt[0,0,90,0,90,0], 60, 80) # Move J 방식으로 특정 각도 까지 움직입니다.
jnt my_joint_angle = {0,0,90,0,90,0}
move_j (my_joint_angle, 60, 80) # Move J 방식으로 특정 각도 까지 움직입니다.7.5 move_j_rel(J, v, v, v=1)
현재 관절 자세에서 주어진 변위 만큼 상대적으로 이동하는 함수입니다.
Input :
하나의 joint, 세 개의 variable 또는 상수를 입력 인자로 가집니다.
J: 관절의 상대 이동 각도
v: 속도 (단위: 𝒅𝒆𝒈/𝒔)
v: 가속도 (단위: 𝒅𝒆𝒈/𝒔𝟐)
v: Wait flag (기본값: 1)- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
# Move J 방식으로 현재 자세에서 주어진 양만큼 상대적으로 움직입니다.
move_j_rel (jnt[0,0,90,0,90,0], 60, 80)
# Move J 방식으로 현재 자세에서 주어진 양만큼 상대적으로 움직입니다.
jnt del_joint_angle = {0,0,90,0,90,0}
move_j_rel (del_joint_angle, 60, 80)7.6 move_jl(P, v, v, v=1)
목표 지점까지 직선이 아닌 move_j 방식을 이용하여 이동하는 함수입니다.
Input :
하나의 point, 세 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표점 TCP 자세
v: 속도 (단위: 𝒅𝒆𝒈/𝒔)
v: 가속도 (단위: 𝒅𝒆𝒈/𝒔𝟐)
v: Wait flag (기본값: 1)- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,300,0,0,0}
point my_point2 = {100,150,100,0,90,0}
move_jl(my_point1, 20, 5) # Move J 방식으로 my_point1 까지 움직입니다.
move_jl(my_point2, 20, 5) # Move J 방식으로 my_point2 까지 움직입니다.7.7 move_pb_clear()
Move PB 에 사용되는 포인트 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
move_pb_clear() # Move PB 에 사용되기 위한 포인트들을 초기화 합니다.7.8 move_pb_add(P, v, v, v)
Move PB 에 사용되는 포인트를 리스트에 추가하는 함수입니다.
Input :
하나의 point, 세 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표 TCP 자세
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 블랜딩 옵션- 0 = 비율 기준 블랜딩.
- 1 = 거리 기준 블랜딩.
v: 블랜딩 양 (0~1 사이 값 / 또는 거리 (mm) )
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
# Move PB 포인트로 my_point1 을 속도 50𝑚𝑚/𝑠, 50% 블랜딩 설정으로 추가합니다.
move_pb_add(my_point1, 50, 0, 0.5)
# Move PB 포인트로 my_point2 를 속도 100𝑚𝑚/𝑠, 50mm 블랜딩 설정으로 추가합니다.
move_pb_add(my_point2, 100, 1, 50)7.9 move_pb_run(v, v, v=1)
move_pb_add 에서 추가된 포인트를 이용하여 Move PB 를 실행하는 함수입니다.
Input :
세 개의 variable 변수 또는 상수를 입력 인자로 가집니다.
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐 )
v: 회전옵션- 0 = Intended (사용자가 티칭한 회전 값을 추종함)
- 1 = Constant (시작 위치의 회전 값을 유지함)
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
move_pb_clear() # Move PB 에 사용되기 위한 포인트들을 초기화 합니다.
move_pb_add(my_point1, 50, 0, 0.5) # Move PB 포인트로 my_point1 을 속도 50𝑚𝑚/𝑠, 50% 블랜딩 설정으로 추가합니다.
move_pb_add(my_point2, 100, 1, 50) # Move PB 포인트로 my_point2 를 속도 100𝑚𝑚/𝑠, 50mm 블랜딩 설정으로 추가합니다.
move_pb_run(200, 1) # 앞서 설정된 블랜딩 옵션을 이용하여 my_point2 까지 이동합니다.
# 이 때, 회전 값은 시작위치와 같은 값을 유지합니다.7.10 move_itpl_clear()
Move ITPL 에 사용되는 포인트 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
move_itpl_clear() # Move ITPL 에 사용되기 위한 포인트들을 초기화 합니다.7.11 move_itpl_add(P, v)
Move ITPL 에 사용되는 포인트를 리스트에 추가하는 함수입니다.
Input :
하나의 point, 하나의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표 TCP 자세
v: 속도 (단위: 𝒎𝒎/𝒔)Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
# Move ITPL 포인트로 my_point1 을 속도 50𝑚𝑚/𝑠로 추가합니다.
move_itpl_add(my_point1, 50)
# Move ITPL 포인트로 my_point2 를 속도 100𝑚𝑚/𝑠로 추가합니다.
move_itpl_add(my_point2, 100)7.12 move_itpl_run(v, v, v=1)
move_itpl_add 에서 추가된 포인트를 이용하여 Move ITPL 을 실행하는 함수입니다.
Input :
세 개의 variable 변수 또는 상수를 입력 인자로 가집니다.
v: 가속도
v: 회전옵션- 0 = Intended (사용자가 티칭한 회전 값을 추종함)
- 1 = Constant (시작 위치의 회전 값을 유지함)
- 2 = Reserved (사용하지 않음)
- 3 = Smooth (Intended 와 유사하지만, 회전 변화율이 부드럽게 변함)
- 4 = Reserved (사용하지 않음)
- 5 = CA-Intended (CA 모드로 Intended 를 수행함)
- 6 = CA-Constant (CA 모드로 Constant 를 수행함)
- 7 = Reserved (사용하지 않음)
- 8 = CA-Smooth (CA 모드로 Smooth 를 수행함)
CA: Combined Arc 모드
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
move_itpl_clear() # Move ITPL 에 사용되기 위한 포인트들을 초기화 합니다.
move_itpl_add(my_point1, 50) # Move ITPL 포인트로 my_point1 을 속도 50𝑚𝑚/𝑠로 추가합니다.
move_itpl_add(my_point2, 100) # Move ITPL 포인트로 my_point2 을 속도 100𝑚𝑚/𝑠로 추가합니다.
move_itpl_run(200, 1) # Interpolation 동작으로 my_point2 까지 이동합니다.
# 이 때 회전 값은 사용자가 티칭한 회전 값을 사용합니다.7.13 move_pro_clear()
Move Pro에 사용되는 포인트 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
# Move Pro에 사용되기 위한 포인트들을 초기화 합니다.
move_pro_clear()7.14 move_pro_add(P, v, v, v)
Move Pro에 사용되는 포인트를 리스트에 추가하는 함수입니다.
Input :
하나의 point, 세 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표 TCP 자세
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 포인트 타입- 0 = 직선
- 1 = 코너 (원호)
- 2 = 블랜드 (거리 기반)
- 3 = 블랜드 (% 기반)
v: 블랜딩 양 (타입 2 또는 3에서 사용)
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
# Move Pro 포인트로 my_point1을 속도 50𝑚𝑚/𝑠, 에 직선-웨이포인트로 추가합니다.
move_pro_add(my_point1, 50, 0, 0)
# Move Pro 포인트로 my_point2를 속도 100𝑚𝑚/𝑠, 에 원호-웨이포인트로 추가합니다.
move_pro_add(my_point2, 100, 1, 0)7.15 move_pro_run(v, v, v=1)
move_pro_add 에서 추가된 포인트를 이용하여 Move Pro를 실행하는 함수입니다.
Input :
세 개의 variable 변수 또는 상수를 입력 인자로 가집니다.
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐)
v: 회전옵션- 0 = Intended (사용자가 티칭한 회전 값을 추종함)
- 1 = Constant (시작 위치의 회전 값을 유지함)
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
# Move Pro에 사용되기 위한 포인트들을 초기화 합니다.
move_pro_clear()
# Move Pro 포인트로 my_point1을 속도 50𝑚𝑚/𝑠 + 선형 지점 웨이포인트
move_pro_add(my_point1, 50, 0, 0)
# Move Pro 포인트로 my_point2를 속도 100𝑚𝑚/𝑠, + 코너 (원호) 지점 웨이포인트
move_pro_add(my_point2, 100, 1, 0)
# Move Pro 포인트 추가 + 선형 지점 웨이포인트
move_pro_add(pnt[150, 0, 400,0,0,0], 50, 0, 0.5)
move_pro_run(200, 1)7.16 move_xb_clear()
MoveXB(L타입과 J타입 블랜드)에 사용되는 포인트 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
# MoveXB에 사용되기 위한 포인트들을 초기화 합니다.
move_xb_clear()7.17 move_xb_add(P, v, v, v, v)
MoveXB에 사용되는 포인트를 리스트에 추가하는 함수입니다. (L-타입 동작 추가)
Input :
P: 목표 TCP 자세
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐)
v: 블랜드 타입 (0 = % 기반 블랜드, 1 = mm거리 기반 블랜드)
v: 블랜드 값 (블랜드 타입에 따라 % 혹은 mm)Return :
없음.
Example :
move_xb_add(pnt[100,200,300,90,0,90], 100, 400, 0, 100)7.18 move_xb_add(J, v, v, v, v)
MoveXB에 사용되는 포인트를 리스트에 추가하는 함수입니다. (J-타입 동작 추가)
Input :
J: 목표 관절각도 자세
v: 속도 (단위: %)
v: 가속도 (단위: %)
v: 블랜드 타입 (0 = % 기반 블랜드, 1 = mm거리 기반 블랜드)
v: 블랜드 값 (블랜드 타입에 따라 % 혹은 mm)Return :
없음.
Example :
move_xb_add(jnt[0,0, 90,0,90,0], 50, 40, 0, 100)7.19 move_xb_run(v, v=1)
move_xb_add 에서 추가된 포인트를 이용하여 MoveXB를 실행하는 함수입니다.
Input :
v: 궤적 블랜딩 옵션- 0 = 속도 기반 블랜딩
- 1 = 위치 기반 블랜딩
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
move_xb_clear()
move_xb_add(pnt[100,200,300,90,0,90], 100, 400, 0, 100)
move_xb_add(jnt[0,0, 90,0,90,0], 50, 40, 0, 100)
move_xb_run(0, 0)7.20 move_lc_clear()
Move LC 에 사용되는 포인트 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
move_lc_clear() # Move LC 에 사용되기 위한 포인트들을 초기화 합니다.7.21 move_lc_add(P, v, v)
Move LC 에 사용되는 포인트를 리스트에 추가하는 함수입니다.
Input :
하나의 point, 두 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표 TCP 자세
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 해당 포인트의 속성 (0 또는 1)- 0 = 직선 통과
- 1 = 원형으로 통과
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
move_lc_add(my_point1, 50, 1) # Move LC 포인트로 my_point1 을 속도 50𝑚𝑚/𝑠로 추가합니다.
move_lc_add(my_point2, 100, 0) # Move LC 포인트로 my_point2 를 속도 100𝑚𝑚/𝑠로 추가합니다.7.22 move_lc_run(v, v, v=1)
move_lc_add 에서 추가된 포인트를 이용하여 Move LC 을 실행하는 함수입니다.
Input :
세 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 가속도
v: 회전옵션- 0 = Intended (사용자가 티칭한 회전 값을 추종함)
- 1 = Constant (시작 위치의 회전 값을 유지함)
- 2 = Reserved (사용하지 않음)
- 3 = Smooth (Intended 와 유사하지만, 회전 변화율이 부드럽게 변함)
- 4 = Reserved (사용하지 않음)
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
move_lc_clear() # Move LC 에 사용되기 위한 포인트들을 초기화 합니다.
move_lc_add(my_point1, 50, 1) # Move LC 포인트로 my_point1 을 속도 50𝑚𝑚/𝑠로 추가합니다.
move_lc_add(my_point2, 100, 0) # Move LC 포인트로 my_point2 을 속도 100𝑚𝑚/𝑠로 추가합니다.
move_lc_run(200, 1) # Linear & Cicle 동작을 사용하여 my_point2 까지 이동합니다.
# 이 때 회전 값은 사용자가 티칭한 회전 값을 사용합니다.7.23 move_lb_clear()
Move LB 에 사용되는 포인트 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
move_lb_clear() # Move LB 에 사용되기 위한 포인트들을 초기화 합니다.7.24 move_lb_add(P, v)
Move LB 에 사용되는 포인트를 리스트에 추가하는 함수입니다.
Input :
하나의 point, 하나의 variable 또는 상수를 입력 인자로 가집니다.
P: 목표 TCP 자세
v: 블랜딩 양(거리 (mm))
※ Move PB 와 달리 비율 블랜딩은 지원하지 않습니다.Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
move_lb_add(my_point1, 20) # Move LB 포인트로 my_point1 을 거리 20 mm 블랜딩으로 추가합니다.
move_lb_add(my_point2, 20) # Move LB 포인트로 my_point2 를 거리 20 mm 블랜딩으로 추가합니다.7.25 move_lb_run(v, v, v, v=1)
move_lb_add 에서 추가된 포인트를 이용하여 Move LB 를 실행하는 함수입니다.
Input :
네 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐)
v: 회전옵션- 0 = Intended (사용자가 티칭한 회전 값을 추종함)
- 1 = Constant (시작 위치의 회전 값을 유지함)
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,200,0,0,0,0}
point my_point2 = {150,0,50,0,0,0}
move_lb_clear() # Move LB 에 사용되기 위한 포인트들을 초기화 합니다.
move_lb_add(my_point1, 20) # Move LB 포인트로 my_point1을 거리 20 mm 블랜딩으로 추가합니다.
move_lb_add(my_point2, 20) # Move LB 포인트로 my_point2를 거리 20 mm 블랜딩으로 추가합니다.
move_lb_run(50, 20, 1) # 앞서 설정된 거리 20mm 블랜딩 옵션을 이용하여 my_point2 까지 이동합니다.
# 이 때 회전 값은 시작위치와 같은 값을 유지합니다.7.26 move_c_points(P, P, v, v, v, v=1)
목표 지점을 지나는 호를 그리는 움직임을 수행하는 함수입니다.
Input :
두 개의 point, 네 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 경유 지점
P: 목표 지점
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐)
v: 회전옵션- 0 = Intended (사용자가 티칭한 회전 값을 추종함)
- 1 = Constant (시작 위치의 회전 값을 유지함)
- 2 = Radial (원의 회전에 따라 TCP 를 회전함)
- 3 = Smooth (Intended 와 유사하지만 경유 지점의 회전 설정은 무시함)
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point1 = {100,100,300,0,90,0}
point my_point2 = {200,200,200,0,90,45}
move_c_points(my_point, my_point2, 50, 10, 2)
# my_point1 을 경유지점으로 하여 my_point2 까지 호를 그리며 움직입니다.
# 회전 동작의 중심점을 기준으로 TCP 의 회전 자세를 함께 이동합니다.7.27 move_c_axis(P, v, v, v, v, v, v, v, v=1)
회전 중심과 회전 축 정보를 이용하여 호를 그리는 움직임을 수행하는 함수입니다.
Input :
하나의 point, 일곱 개의 variable 또는 상수를 입력 인자로 가집니다.
P: 회전 중심점 (단위: mm)
v: x 축 벡터
v: y 축 벡터
v: z 축 벡터
v: 회전 각도 (단위: deg)
v: 속도 (단위: 𝒎𝒎/𝒔)
v: 가속도 (단위: 𝒎𝒎/𝒔𝟐)
v: 회전옵션- 0 = Intended (아래의 Constant 와 동일하게 움직임)
- 1 = Constant (시작 위치의 회전 값을 유지함)
- 2 = Radial (원의 회전에 따라 TCP 를 회전함)
v: Wait flag (기본값: 1)
- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
point my_point = {200,200,200,0,0,0}
move_c_axis(my_point, 1, 0, 0, 180, 50, 10, 2)
# my_point1 을 중심으로 하여 x 축 방향으로 180 도 움직입니다.
# 회전 동작의 중심점을 기준으로 TCP 의 회전 자세를 함께 이동합니다.7.28 move_jb_clear()
Move JB 에 사용되는 관절을 정보 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
move_jb_clear() # Move JB 에 사용되기 위한 관절들을 초기화 합니다.7.29 move_jb_add(J)
Move JB 에 사용되는 관절 정보를 리스트에 추가하는 함수입니다.
Input :
하나의 joint 를 입력 인자로 가집니다.
J: 목표 관절Return :
없음.
Example :
jnt my_joint1 = {0, 0,0,0,0,0}
jnt my_joint2 = {90,30,15,0,0,0}
move_jb_add(my_joint1) # Move JB 관절로 my_joint1 을 추가합니다.
move_jb_add(my_joint2) # Move JB 관절로 my_joint2 를 추가합니다.7.30 move_jb_run(v, v, v=1)
move_jb_add 에서 추가된 포인트를 이용하여 Move JB 를 실행하는 함수입니다.
Input :
세 개의 variable 또는 상수를 입력 인자로 가집니다.
v: 속도 (𝒅𝒆𝒈/𝒔)
v: 가속도 (𝒅𝒆𝒈/𝒔𝟐)
v: Wait flag (기본값: 1)- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
jnt my_joint1 = {0, 0,0,0,0,0}
jnt my_joint2 = {90,30,15,0,0,0}
move_jb_clear() # Move JB 에 사용되기 위한 관절들을 초기화 합니다.
move_jb_add(my_joint1) # Move JB 관절로 my_joint1 을 추가합니다.
move_jb_add(my_joint2) # Move JB 관절로 my_joint2 를 추가합니다.
move_jb_run(50, 20) # 앞서 설정된 관절들 위치로 정지없이 부드럽게 이동합니다7.31 move_jb2_clear()
Move JB2(시간 기반블랜딩)에 사용되는 관절을 정보 리스트를 초기화 하는 함수입니다.
Input :
없음.Return :
없음.
Example :
# Move JB2에 사용되기 위한 관절들을 초기화 합니다.
move_jb2_clear()7.32 move_jb2_add(J, v, v, 0, v)
Move JB2에 사용되는 관절 정보를 리스트에 추가하는 함수입니다.
Input :
하나의 joint를 입력 인자로 가집니다.
J: Target joint angles
v: 속도 (𝒅𝒆𝒈/𝒔)
v: 가속도 (𝒅𝒆𝒈/𝒔𝟐)
0: 더미
v: 블랜드 율 (%)Return :
없음.
Example :
jnt my_joint1 = {0, 0,0,0,0,0}
jnt my_joint2 = {90,30,15,0,0,0}
# Move JB2 관절로 my_joint1을 추가합니다. 블랜드 율 50%
move_jb2_add(my_joint1, 60, 80, 0, 50)
# Move JB2 관절로 my_joint2를 추가합니다. 블랜드 율 100%
move_jb2_add(my_joint2, 90, 100, 0, 100)7.33 move_jb2_run( v=1)
move_jb_add2 에서 추가된 포인트를 이용하여 Move JB2를 실행하는 함수입니다.
Input :
v: Wait flag (기본값: 1)- 0 = 기다리지 않음.
- 1 = 동작 완료를 기다림.
Return :
없음.
Example :
jnt my_joint1 = {0, 0,0,0,0,0}
jnt my_joint2 = {90,30,15,0,0,0}
# Move JB2에 사용되기 위한 관절들을 초기화 합니다.
move_jb2_clear()
# Move JB2 관절로 my_joint1을 추가합니다.
move_jb2_add(my_joint1, 10, 20, 0, 100)
# Move JB2 관절로 my_joint2를 추가합니다.
move_jb2_add(my_joint2, 60, 80, 0, 80)
# 앞서 설정된 관절들 위치로 정지없이 부드럽게 이동합니다.
move_jb2_run()7.34 Servo J
move_servo_j(jnt[j0, j1, j2, j3, j4, j5], t1, t2, gain, alpha)
- j0 ~ j5 : Desired Joint angle in degree (-360 ~ 360)
- t1 : 목표 지점까지 도착 시간 (t1 >= 0.002)
- t2 : 도착한 후, 해당 동작을 유지할 시간 (0.02 < t2 < 0.2)
- gain : 속도 추종률 (gain > 0)
- alpha : low-pass-filter gain. 작을수록 동작이 부드러워짐 (0 < alpha < 1)
7.35 Servo L
move_servo_l(pnt[x, y, z, rx, ry, rz], t1, t2, gain, alpha)
- x,y,z,rx,ry,rz : Desired Cartesian posture in mm,deg unit (ZY'X'' Euler)
- t1 : 목표 지점까지 도착 시간 (t1 >= 0.002)
- t2 : 도착한 후, 해당 동작을 유지할 시간 (0.02 < t2 < 0.2)
- gain : 속도 추종률 (gain > 0)
- alpha : low-pass-filter gain. 작을수록 동작이 부드러워짐 (0 < alpha < 1)
7.36 Servo T
move_servo_t(jnt[jt0, jt1, jt2, jt3, jt4, jt5], t1, t2, mode)
- jt0 ~ jt5 : Torque values in Nm unit
- t1 : 목표 지점까지 도착 시간 (t1 >= 0.002)
- t2 : 도착한 후, 해당 동작을 유지할 시간 (0.02 < t2 < 0.3)
- mode :
0 = 절대값 모드 : 제어 토크 = 입력된 토크
1 = 상대값 모드 1 : 제어 토크 = 입력된 토크 + 로봇 팔 자중
2 = 상대값 모드 2 : 제어 토크 = 입력된 토크 + 마찰보상30%
3 = 상대값 모드 3 : 제어 토크 = 입력된 코드 + 로봇 팔 자중 + 마찰보상30%
7.37 Speed J
move_speed_j(jnt[dj0, dj1, dj2, dj3, dj4, dj5], t1, t2, gain, alpha)
- dj0 ~ dj5 : Desired Joint angle speed in degree / sec(deg/s)
- t1 : 목표 지점까지 도착 시간 (t1 >= 0.002)
- t2 : 도착한 후, 해당 동작을 유지할 시간 (0.02 < t2 < 0.2)
- gain : 속도 추종률 (gain = 1)
- alpha : Low-pass-filter gain. 작을수록 동작이 부드러워짐 (0 < alpha < 1)
7.38 Speed L
move_speed_l(pnt[dx, dy, dz, drx, dry, drz], t1, t2, gain, alpha)
- dx,dy,dz,drx,dry,drz : Desired Cartesian posture speed in mm/s, deg/s unit (ZY'X'' Euler)
- t1 : 목표 지점까지 도착 시간 (t1 >= 0.002)
- t2 : 도착한 후, 해당 동작을 유지할 시간 (0.02 < t2 < 0.2)
- gain : 속도 추종률 (gain > 0)
- alpha : low-pass-filter gain. 작을수록 동작이 부드러워짐 (0 < alpha < 1)
7.39 Jog-L
jog_robot_l(모드, x속도, y속도, z속도, rx속도, ry속도, rz속도)
jog_robot_l(모드, x속도, y속도, z속도, rx속도, ry속도, rz속도, 가속비율, 감속비율)
- 모드
0: 정지
1: Global 좌표계
2: Tool 좌표계
3 ~ 5: User 좌표계 0~2 - x,y,z 속도
mm/s 단위 (-250 ~ 250) - rx,ry,rz 속도
deg/s 단위 (-45 ~ 45) - 가/감속비율
기본값1.0
범위: 0~10.0
크게주면 더 빠르게 가/감속, 작은값주면 천천히 가/감속
7.40 Jog-J
jog_robot_j(모드, 0속도, 1속도, 2속도, 3속도, 4속도, 5속도)
jog_robot_j(모드, 0속도, 1속도, 2속도, 3속도, 4속도, 5속도, 가속비율, 감속비율)
- 모드
0: 정지
1: 로봇 팔 관절
2: 부가축 - 0~5 속도
deg/s 단위 (각 축의 속도 제한 범위에 따라 다름) - 가/감속비율
기본값1.0
범위: 0~10.0
크게주면 더 빠르게 가/감속, 작은값주면 천천히 가/감속
8. 그리퍼 및 센서 함수
8.1 gripper_rtq_hande_init(v)
Robotiq 사의 Hand-E 그리퍼 초기화 함수
Input :
v: 그리퍼/센서의 연결 포트입니다.- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_hande_init(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.2 gripper_rtq_hande_reset(v)
Robotiq 사의 Hand-E 그리퍼 리셋 함수
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_hande_reset(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.3 gripper_rtq_hande_go(v, v, v, v)
Robotiq 사의 Hand-E 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 힘 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_rtq_hande_go(1, 100, 50, 100)
# 제어박스에 연결된 그리퍼를 위치 100%로 움직이다. (with 속도 50%, 힘 100%)8.4 gripper_rtq_2f85_init(v)
Robotiq 사의 2f85 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_2f85_init(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.5 gripper_rtq_2f85_reset(v)
Robotiq 사의 2f85 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_2f85_reset(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.6 gripper_rtq_2f85_go(v, v, v, v)
Robotiq 사의 2f85 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 힘 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_rtq_2f85_go(1, 100, 50, 100)
# 제어박스에 연결된 그리퍼를 위치 100%로 움직이다. (with 속도 50%, 힘 100%)8.7 gripper_rtq_2f140_init(v)
Robotiq 사의 2f140 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_2f140_init(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.8 gripper_rtq_2f140_reset(v)
Robotiq 사의 2f140 그리퍼 리셋 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_2f140_reset(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.9 gripper_rtq_2f140_go(v, v, v, v)
Robotiq 사의 2f140 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 힘 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_rtq_2f140_go(1, 100, 50, 100)
# 제어박스에 연결된 그리퍼를 위치 100%로 움직이다. (with 속도 50%, 힘 100%)8.10 gripper_rtq_epick_reset(v)
Robotiq 사의 epick 그리퍼 리셋 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_epick_reset(1) # 그리퍼 통신선이 제어박스에 연결되었을 경우8.11 gripper_rtq_epick_suction(v)
Robotiq 사의 epick 그리퍼 공압 흡입 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_epick_suction(1) # 제어박스에 연결된 공압 그리퍼를 흡입8.12 gripper_rtq_epick_release(v)
Robotiq 사의 epick 그리퍼 공압 배출 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_epick_release(1) # 제어박스에 연결된 공압 그리퍼를 배출8.13 gripper_rtq_epick_hold(v)
Robotiq 사의 epick 그리퍼 공압 유지 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rtq_epick_hold(1) # 제어박스에 연결된 공압 그리퍼를 유지8.14 gripper_rts_rhp12rn_init(v)
ROBOTIS 사의 rhp12rn 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_rts_rhp12rn_init(1) # 제어박스에 연결된 그리퍼 초기화8.15 gripper_rts_rhp12rn_go(v, v)
ROBOTIS 사의 rhp12rn 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
Return :
없음.
Example :
gripper_rts_rhp12rn_go(1, 100) # 제어박스에 연결된 그리퍼를 위치 100%로 움직임.8.16 gripper_jrt_jegb485_init(v)
주강로보테크 사의 jegb485 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_jrt_jegb485_init(1) # 제어박스에 연결된 그리퍼 초기화8.17 gripper_jrt_jegb485_go(v, v)
주강로보테크 사의 jegb485 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
Return :
없음.
Example :
gripper_jrt_jegb485_go(1, 100) # 제어박스에 연결된 그리퍼를 위치 100%로 움직임.8.18 gripper_jrt_jegb485_go(v, v, v, v)
주강로보테크 사의 jegb485 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 가속도 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_jrt_jegb485_go(1, 100, 50, 50)
# 제어박스에 연결된 그리퍼를 위치 100%로 움직이다. (with 속도 & 가속도 50%)8.19 gripper_jrt_jegb485_set(v, v, v, v)
주강로보테크 사의 jegb485 그리퍼 설정 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 가속도 % 값 (범주: 0~100)
v: 목표 힘 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_jrt_jegb485_set(1, 50, 30, 20)
# 제어박스에 연결된 그리퍼의 운동 속성 속도/가속도/힘을 각각 50, 30, 20%로 설정8.20 gripper_jrt_jegb4140_init(v)
주강로보테크 사의 jegb4140 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
Return :
없음.
Example :
gripper_jrt_jegb4140_init(1) # 제어박스에 연결된 그리퍼 초기화8.21 gripper_jrt_jegb4140_go(v, v)
주강로보테크 사의 jegb4140 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
Return :
없음.
Example :
gripper_jrt_jegb4140_go(1, 100) # 제어박스에 연결된 그리퍼를 위치 100%로 움직이다.8.22 gripper_jrt_jegb4140_go(v, v, v, v)
주강로보테크 사의 jegb4140 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 위치 % 값 (범주: 0~100)
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 가속도 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_jrt_jegb4140_go(1, 100, 50, 50)
# 제어박스에 연결된 그리퍼를 위치 100%로 움직이다. (with 속도&가속도 50%)8.23 gripper_jrt_jegb4140_set(v, v, v, v)
주강로보테크 사의 jegb4140 그리퍼 설정 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485
v: 목표 속도 % 값 (범주: 0~100)
v: 목표 가속도 % 값 (범주: 0~100)
v: 목표 힘 % 값 (범주: 0~100)Return :
없음.
Example :
gripper_jrt_jegb4140_set(1, 50, 30, 20)
# 제어박스에 연결된 그리퍼의 운동 속성 속도/가속도/힘을 각각 50, 30, 20%로 설정8.24 gripper_dh_ag95_init(v)
DH Robotics 사의 AG-95 그리퍼 초기화 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485 / 또는 USB
Return :
없음.
Example :
gripper_dh_ag95_init(1) # 제어박스에 연결된 그리퍼 초기화8.25 gripper_dh_ag95_gripforce(v, v)
DH Robotics 사의 AG-95 그리퍼 안쪽 잡는 힘 제한 설정.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485 / 또는 USB
v: 그리퍼 안쪽 물체를 잡는 힘을 제한합니다. (20 ~ 100 %)
Return :
없음.
Example :
gripper_dh_ag95_gripforce(1, 30)
# 제어박스에 연결된 그리퍼의 잡는 힘 제한을 30%로 설정합니다.8.26 gripper_dh_ag95_openforce(v, v)
DH Robotics 사의 AG-95 그리퍼 바깥쪽 펴는 힘 제한 설정.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485 / 또는 USB
v: 그리퍼 바깥쪽 펴는 힘을 제한합니다. (20 ~ 100 %)
Return :
없음.
Example :
gripper_dh_ag95_openforce(1, 70)
# 제어박스에 연결된 그리퍼의 펴는 힘 제한을 70%로 설정합니다.8.27 gripper_dh_ag95_go(v, v)
DH Robotics 사의 AG-95 그리퍼 이동 함수.
Input :
v: 그리퍼/센서의 연결 포트입니다- 0 = 툴 플랜지의 RS485
- 1 = 제어 박스의 RS485 / 또는 USB
v: 그리퍼의 이동 목표 위치를 설정합니다. (0 ~ 100 %)
Return :
없음.
Example :
gripper_dh_ag95_go(1, 50) # 제어박스에 연결된 그리퍼를 50% 위치로 보냅니다.8.28 gripper_setech_cmd(v)
Setech 사의 너트러너 장치 구동
Input :
v: 명령어 번호- 0 = Stop
- 1 = Reset
- 2 = Quick Start
- 3 = First stage
- 4 = Second stage
- 5 = Reverse
Return :
없음.
Example :
gripper_setech_cmd(#)9. 통신 함수
9.1 mc_comm_set_bit(v, S, v, v=1)
Mitsubishi 등의 PLC 장비에서 제공하는 MC 통신 포멧으로 원하는 비트 데이터 (1 bit)를 원하는 주소 값에 보냅니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
S: PLC 장비의 메모리 주소 값 (string 형태)- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
v: PLC 메모리에 보내고 싶은 값 (0 또는 1)
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
Return :
v: PLC 로부터 유효 (Handshake) 시그널 수신 여부- 0: 수신 실패
- 1: 수신 성공
Example :
str target_address = “D2000”
var target_write_value = 1
var is_tx_success = mc_comm_set_bit(0, target_address, target_write_value)
# 0 번 소켓을 사용하여, PLC 주소 D2000 에 값 1 를 보냅니다.
# 또는 아래와 같이 쓸 수 있습니다.
var is_tx_success = mc_comm_set_bit(0, “D2000”, 1)9.2 mc_comm_set_word(v, S, v, v=1)
Mitsubishi 등의 PLC 장비에서 제공하는 MC 통신 포멧으로 원하는 워드 데이터 (1 word = 16 bit)를 원하는 주소 값에 보냅니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
S: PLC 장비의 메모리 주소 값 (string 형태)- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
v: PLC 메모리에 보내고 싶은 값
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
Return :
v: PLC 로부터 유효 (Handshake) 시그널 수신 여부- 0: 수신 실패
- 1: 수신 성공
Example :
str target_address = “D2000”
var target_write_value = 150
var is_tx_success = mc_comm_set_word(0, target_address, target_write_value)
# 0 번 소켓을 사용하여, PLC 주소 D2000 에 값 150 을 보냅니다.
# 또는 아래와 같이 쓸 수 있습니다.
var is_tx_success = mc_comm_set_word(0, “D2000”, 150)9.3 mc_comm_req_bit(v, S, v=1)
Mitsubishi 등의 PLC 장비의 특정 주소 값의 비트 데이터(1 bit)를 요청 및 수신합니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
S: PLC 장비의 메모리 주소 값 (string 형태)- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)
- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
Return :
v: PLC 로부터 받은 비트 데이터 값 입니다.- -1: 수신 실패
- 0 또는 1: 수신된 비트 데이터 값
Example :
str target_address = “D2000”
var rx_data = mc_comm_req_bit(0, target_address)
# 0 번 소켓을 사용하여, PLC 주소 D2000 의 비트 값을 요청/수신 합니다.
# 또는 아래와 같이 쓸 수 있습니다.
var rx_data = mc_comm_req_bit(0, “D2000”)9.4 mc_comm_req_word(v, S, v=1)
Mitsubishi 등의 PLC 장비의 특정 주소 값의 워드 데이터(1 word = 1 bit)를 요청 및 수신합니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0~4)
S: PLC 장비의 메모리 주소 값 (string 형태)- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)
- 주소값은 D..., X... 등의 형태로, PLC 장비가 제공하는 범주의 주소 값
Return :
v: PLC 로부터 받은 비트 데이터 값 입니다.- -1: 수신 실패
Example :
str target_address = “D2000”
var rx_data = mc_comm_req_word(0, target_address)
# 0 번 소켓을 사용하여, PLC 주소 D2000 의 워드 값을 요청/수신 합니다.
# 또는 아래와 같이 쓸 수 있습니다.
var rx_data = mc_comm_req_word(0, “D2000”)9.5 socket_connect(v, S, v)
TCP/IP 통신을 위하여 소켓 포트를 열고 상대방 서버에 접속하는 함수 입니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
S: 서버의 IP 주소 (string 형태)- “192.168.0.10” 과 같은 형태로 입력
Return :
없음.
Example :
socket_connect(0, “192.168.0.10”, 5678)
# 0 번 소켓을 사용하여, 서버 주소 “192.168.0.10”의 포트 5678 에 접속9.6 socket_disconnect(v)
TCP/IP 통신의 소켓 포트를 닫고 연결을 끊습니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)Return :
없음.
Example :
socket_disconnect(0) # 0 번 소켓 핸들러로 열려 있는 통신을 끊고 종료합니다.9.7 socket_send_str(v, S)
TCP/IP 통신을 통하여 문자열을 서버로 전송합니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
S: 서버로 전송할 문자열Return :
없음.
Example :
socket_send_str(0, “hello world”) # 0 번 소켓이 연결되어 있는 서버로 “hello world”전송
var my_var = 1234
socket_send_str(0, to_str(my_var)) # 0 번 소켓이 연결되어 있는 서버로 변수 값을 문자열로 전송9.8 socket_read_str(v)
TCP/IP 통신을 통하여 서버로부터 수신한 문자열을 리턴 합니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)Return :
S: 서버로부터 수신한 문자열
Example :
str receive_str = socket_read_str(0)
if (SD_SOCKET_LAST_READ_0){
debug “receive_str”
}
# 0 번 소켓이 연결된 서버로부터 문자열을 수신하고, 수신된 문자열이 있을 경우 이를 알람창에 표시.
# 서버에서 “rainbow”라고 보낼 시, receivce_str 문자열 변수에는 “rainbow”가 저장됩니다.9.9 socket_read_var(v)
TCP/IP 통신을 통하여 서버로부터 수신한 아스키문자열 숫자 변수 형태로 리턴 합니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)Return :
v: 서버로부터 수신한 숫자
Example :
var receive_var = socket_read_var(0)
if (SD_SOCKET_LAST_READ_0){
debug “receive_var”
}
# 0 번 소켓이 연결된 서버로부터 문자열을 수신하고, 수신된 문자열을 숫자 변수 형태로 변환, 그리고 수신이 있을 경우 이를 알람창에 표시.
# 서버에서 “123.456”을 보낼 시, receivce_var 숫자 변수에는 123.456 이 저장됩니다.9.10 hmi_set_one_word (v, v, v, v=1)
Proface/TOP 등의 HMI 장비에서 제공하는 메모리 링크(Memory-link) 통신 포멧으로 원하는 워드 데이터 (1 word = 16 bit)를 원하는 주소 값에 보냅니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
v: HMI 장비의 메모리 주소 값 (0 ~ 9999)
v: HMI 메모리에 보내고 싶은 값 또는 변수(variable)
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)Return :
v: HMI 로부터 유효 (Handshake) 시그널 수신 여부- 0: 수신 실패
- 1: 수신 성공
Example :
var target_address = 6000
var target_write_value = 150
var is_tx_success = hmi_set_one_word(0, target_address, target_write_value)
# 0 번 소켓을 사용하여, HMI 주소 6000 에 값 150 을 보냅니다.
# 또는 아래와 같이 쓸 수 있습니다.
var is_tx_success = hmi_set_one_word(0, 6000, 150)9.11 hmi_set_multi_word (v, v, v, v=1, A)
Proface/TOP 등의 HMI 장비에서 제공하는 메모리 링크(Memory-link) 통신 포멧으로 원하는 워드 데이터 (1 word = 16 bit) 배열을 원하는 주소 값부터 지정된 길이까지 보냅니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
v: HMI 장비의 메모리 주소 값 (0 ~ 9999) 시작 값
v: HMI 장비에 보낼 데이터 개수 (최대 20개)
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1) A: 보내고자 하는 배열 데이터Return :
v: HMI 로부터 유효 (Handshake) 시그널 수신 여부- 0: 수신 실패
- 1: 수신 성공
Example :
arr my_arr = {150, 160, 200, 210}
var is_tx_success = hmi_set_multi_word(0, 6000, 4, my_arr)
# 0번 소켓을 사용하여, HMI 주소 6000 부터 4개 주소 값(6000 ~ 6003)에 배열에 저장된 값 4개
(150, 160, 200, 210)를 각각 보냅니다.9.12 hmi_req_one_word (v, v, v=1)
Proface/TOP 등의 HMI 장비에서 제공하는 메모리 링크(Memory-link) 통신 포멧으로 원하는 주소 값의 워드 데이터 (1 word = 16 bit)를 읽어옵니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
v: HMI 장비의 메모리 주소 값 (0 ~ 9999)
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)Return :
v: HMI 로부터 수신한 해당 주소 값에 저장된 값
Example :
var my_num
my_num = hmi_req_one_word(0, 7000)
# 0번 소켓을 사용하여, HMI 주소 7000의 값을 읽어서 변수 my_num 에 저장합니다.9.13 hmi_req_multi_word (v, v, v, v=1)
Proface/TOP 등의 HMI 장비에서 제공하는 메모리 링크(Memory-link) 통신 포멧으로 원하는 주소 값들의 워드 데이터 (1 word = 16 bit)를 배열 형태로 읽어옵니다.
Input :
v: 소켓 통신 핸들러 번호 입니다. (0 ~ 4)
v: HMI 장비의 메모리 주소 값 (0 ~ 9999)
v: HMI 장비로부터 읽을 데이터 개수 (최대 20 개)
v: Handshake 시그널 수신 대기 최대 시간 / Timeout 시간 (단위: 초) (기본값: 1)Return :
A: HMI 로부터 수신한 데이터를 저장할 배열 변수 (array)
Example :
arr my_array
my_array = hmi_req_multi_word(0, 7000, 10)
# 0번 소켓을 사용하여, HMI 주소 7000부터 10개의 값 (주소값 7000~7009)을 읽어서 배열 변수 my_array 에 저장합니다.10. 벡터 (VECTOR)
벡터 란, 동적 할당되는 변수 형태를 지칭합니다. 길이가 지정되지 않은 배열의 형태입니다.
흔히, C++와 같은 언어에서 vector<float> 또는 vector<string> 과 같은 형태로 선언됩니다.
Rainbow Robotics 의 스크립트 시스템에서는 숫자 벡터와, 문자열 벡터, 두 가지가 지원되며, 각각은 C++ 기준, vector<float>과 vector<string>에 대응됩니다.
10.1 숫자 벡터
# 선언은 vec 이라는 선언자를 사용합니다.
vec hello_world
# 선언과 동시에 초기화도 가능합니다.
vec hello_world = {10, 20, 30}
# 벡터의 길이는 vec_length (혹은 vec_leng) 함수로 획득 가능합니다.
# 이때 함수의 입력 인자는 벡터 형태의 변수 명 입니다.
var num = vec_length( hello_world)
# 벡터에 인자를 추가하고 자 할 때는 vec_push (혹은 vec_push_back, 혹은 vec_add) 함수를
사용합니다.
# 이때 함수의 입력 인자는 벡터 형태의 변수 명과 추가하고 싶은 숫자 입니다.
vec_push( hello_world, 40)
vec_push( hello_world, 50)
# 벡터를 비우고 (초기화) 싶을 경우 vec_clear (혹은 vec_clr) 함수를 사용합니다.
# 이 때 함수의 입력 인자는 벡터 형태의 변수 명 입니다.
vec_clear(hello_world)
# 벡터에 저장되어 있는 값을 참조 하고 싶을 경우 vec_at 함수 를 사용합니다.
# 이 때 함수의 입력 인자는 벡터 형태의 변수 명과, 참조하고 싶은 인덱스 입니다.
# [] 연산자를 통해서도 인덱스 참조가 가능합니다.
var value = vec_at(hello_world, 2)
var value = hello_world[2]Example :
vec mung = {10, 20} # mung 이라는 이름으로 벡터 선언, 초기값 10 과 20
var my_num = vec_length(mung) # my_num 에는 벡터 길이 2 가 리턴
vec_push( mung, 30) # mung 벡터 가장 뒤에 숫자 30 추가
vec_push( mung, 40) # mung 벡터 가장 뒤에 숫자 40 추가
var my_num = vec_length(mung) # my_num 에는 벡터 길이 4 가 리턴
var a = vec_at(mung, 1) # mung 벡터 인덱스 1 을 참조 하여 a 에는 20 이 리턴
var b = mung[3] # mung 벡터 인덱스 3 을 참조 하여 b 에는 40 이 리턴
vec_clear(mung) # mung 벡터 비우기
var my_num = vec_length(mung) # my_num 에는 벡터 길이 0 이 리턴10.2 문자열 벡터
문자열 벡터의 경우, 숫자 벡터와 함수 사용법은 동일 합니다.
다만, 시스템 메모리 제한 상, 문자열 벡터는 사전에 정의된 이름만 사용 가능합니다.
아래와 같이 10 개의 문자열 벡터가 시스템에 정의되어 있습니다. 사용자는 선언할 필요 없이, 바로 아래의 이름의 문자열 벡터를 사용 가능합니다.
사전 정의된 문자열 벡터 : str_vec_0, str_vec_1, … , str_vec_9
벡터에 관한 사용 함수는, 앞장에 소개된 숫자 벡터와 동일합니다.
Example :
vec_push(str_vec_3, “hello”) # str_vec_3 벡터 에 “hello” 라는 문자열 추가
vec_push(str_vec_3, “world”) # str_vec_3 벡터 에 “world” 라는 문자열 추가
var my_num = vec_length(str_vec_3) # my_num 에는 벡터 길이 2 가 리턴
vec_push(str_vec_3, “aa”) # str_vec_3 벡터 에 “aa” 라는 문자열 추가
vec_push(str_vec_3, “bb”) # str_vec_3 벡터 에 “bb” 라는 문자열 추가
var my_num = vec_length(str_vec_3) # my_num 에는 벡터 길이 4 가 리턴
str sa = vec_at(str_vec_3, 1) # str_vec_3 벡터 인덱스 1 을 참조 하여 sa 에는 “world”이 리턴
str sb = str_vec_3[3] # str_vec_3 벡터 인덱스 3 을 참조 하여 sb 에는 “bb”이 리턴
vec_clear(str_vec_3) # str_vec_3 벡터 비우기
var my_num = vec_length(str_vec_3) # my_num 에는 벡터 길이 0 가 리턴