Rainbow x Robotiq Gripper/Sensor v1.2
1. 하드웨어 결선
주의
- 결선 재구성 시, 시스템 전원이 꺼진 상태에서 진행하세요.
1.1 제어 박스와 연결할 경우
- Robotiq 제품의 전원 케이블을 컨트롤 박스 I/O 터미널 블록의 24V에 연결하세요.
- Robotiq 제품의 접지 케이블을 컨트롤 박스 I/O 터미널 블록의 GND에 연결하세요.
- Robotiq 제품의 통신 USB 케이블을 컨트롤 박스의 USB 포트에 연결하세요.
TIP
지원 장치 유형 : 2F-85 / 2F-140 / Hand-E / FT300 / EPick
1.2 로봇 툴 플랜지에 연결할 경우
- Robotiq 제품의 전원 케이블을 Tool-Flange I/O 단자의 24V에 연결하세요.
- Robotiq 제품의 접지 케이블을 Tool-Flange I/O 단자의 GND에 연결하세요.
- Robotiq 제품의 RS485 D+, D-(A/B) 케이블을 Tool-Flange I/O 단자의 RS485에 연결하세요.
TIP
지원 장치 유형 : 2F-85 / 2F-140 / Hand-E / EPick
2. 소프트웨어 사용
주의
- 결선 재구성 시, 시스템 전원이 꺼진 상태에서 진행하세요.
- 소프트웨어 버전에 따라 UI 화면 구성은 상이할 수 있습니다.
2.1 Robotiq Hand-E
Make 페이지 > Command Actions > Gripper
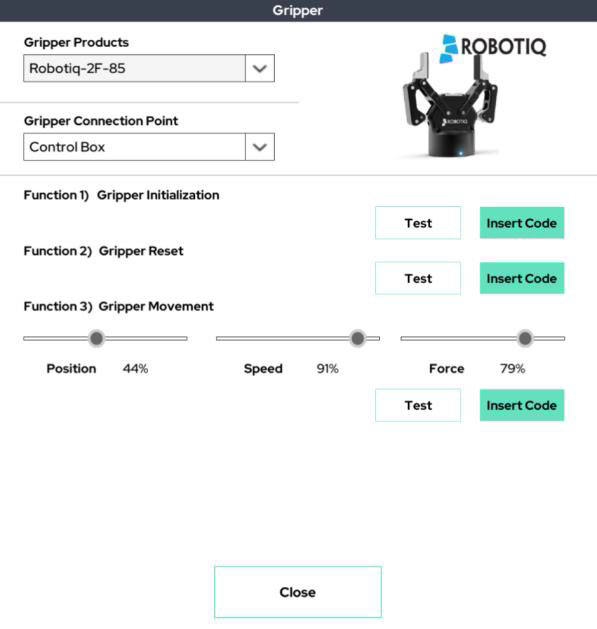
2.2 Robotiq 2F-85
Make 페이지 > Command Actions > Gripper
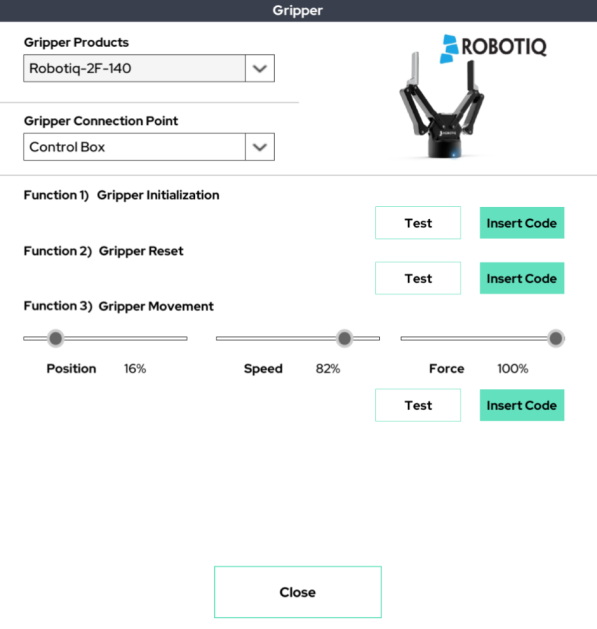
2.3 Robotiq 2F-140
Make 페이지 > Command Actions > Gripper
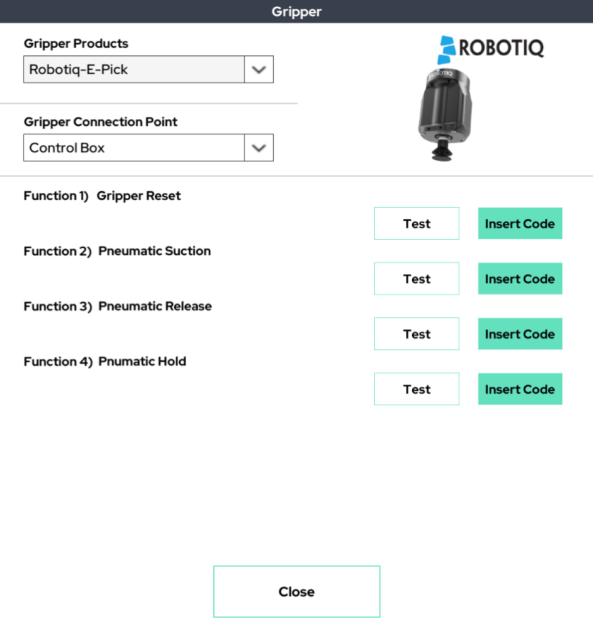
2.4 Robotiq EPick
Make 페이지 > Command Actions > Gripper
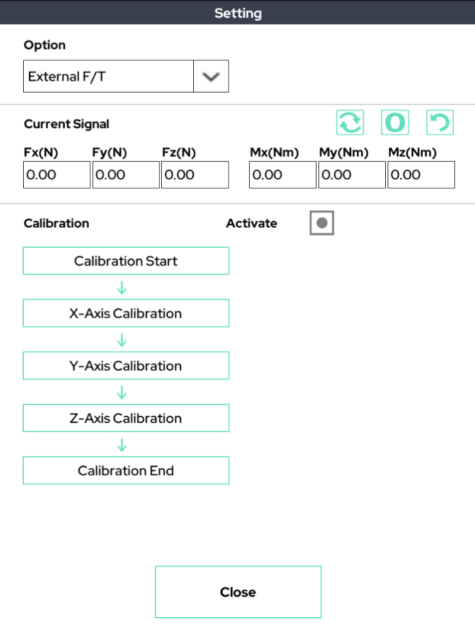
2.5 FT300 캘리브레이션
Make 페이지 > 오른쪽 사이드 바 > Setting
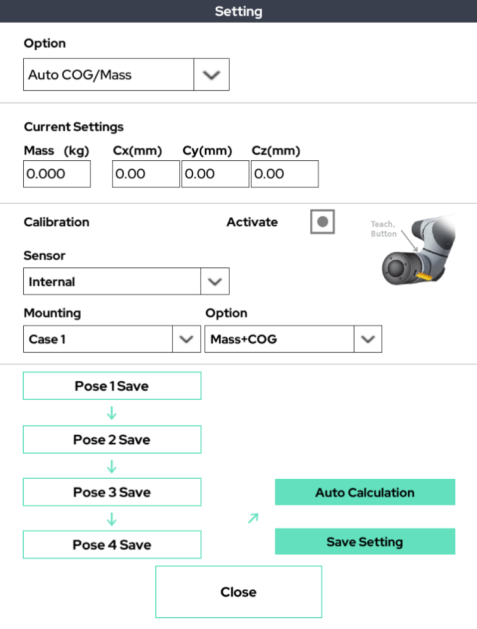
2.6 FT300 을 활용한 자동 COM (COG) 찾기
Make 페이지 > 오른쪽 사이드 바 > Setting
2.7 FT300 을 활용한 힘 제어
Make 페이지 > Command Actions > Force