Rainbow x Robotiq Gripper/Sensor v1.2
1. Hardware Connection
CAUTION
- Before connecting the device, proceed with the connection process with the power off state.
1.1 Connection with Control Box
- Plug the Robotiq product's power cable into 24V on the Control-box I/O terminal block.
- Plug the Robotiq product's ground cable into GND on the Control-box I/O terminal block.
- Plug the Robotiq product's communication USB cable into the USB port of the Control-box.
TIP
Supporting Devices : 2F-85 / 2F-140 / Hand-E / FT300 / EPick
1.2 Connection with End Tool Flange
- Plug the Robotiq product's power cable into 24V on the Tool-Flange I/O terminal.
- Plug the Robotiq product's ground cable into GND on the Tool-Flange I/O terminal.
- Plug the Robotiq product's RS485 D+, D- (A/B) cables into RS485 on the Tool-Flange I/O terminals.
TIP
Supporting Devices : 2F-85 / 2F-140 / Hand-E / EPick
2. Software Usage
CAUTION
- Before connecting the device, proceed with the connection process with the power off state.
- The UI screen configuration may differ depending on the software version.
2.1 Robotiq Hand-E
Make screen > Command Actions > Gripper
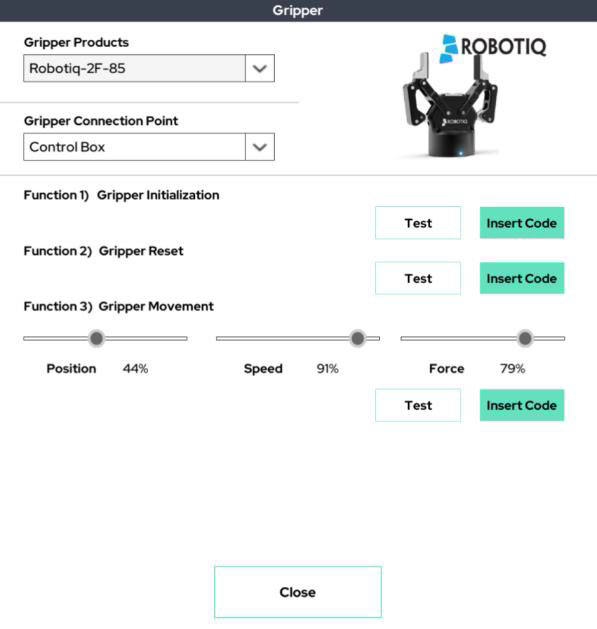
2.2 Robotiq 2F-85
Make screen > Command Actions > Gripper
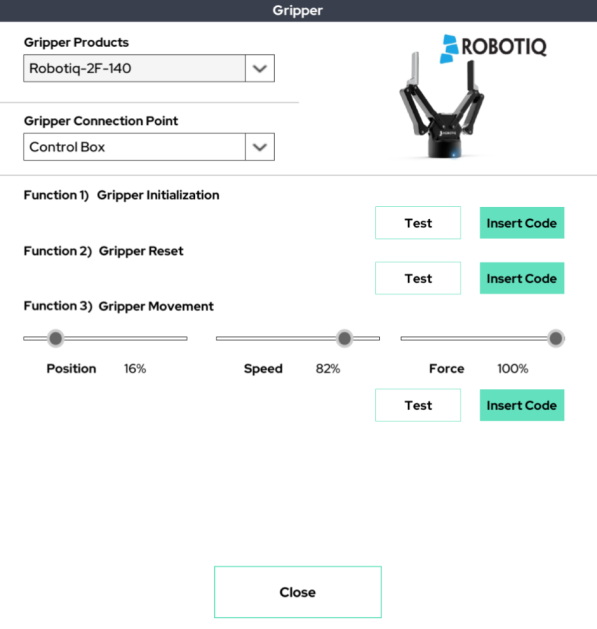
2.3 Robotiq 2F-140
Make screen > Command Actions > Gripper
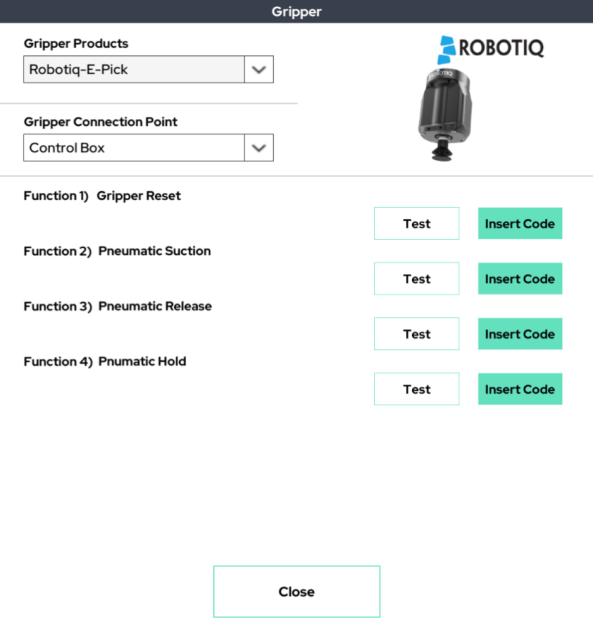
2.4 Robotiq EPick
Make screen > Command Actions > Gripper
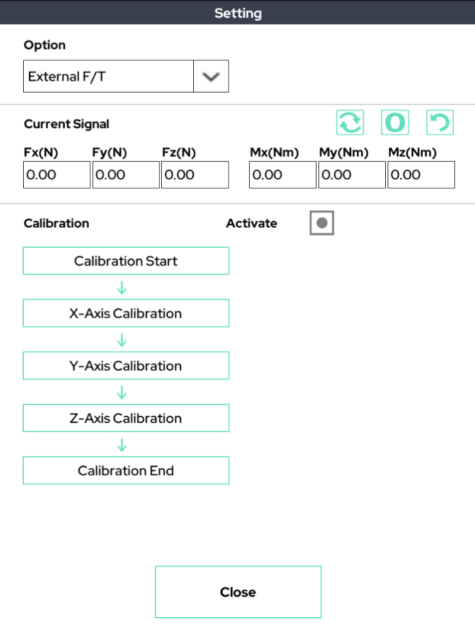
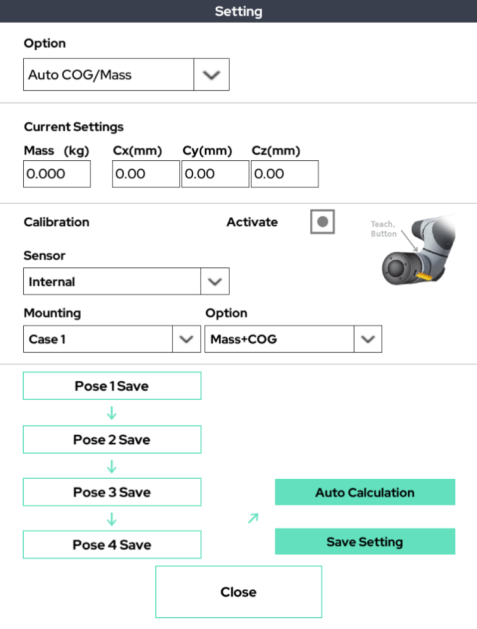
2.5 FT300 Calibration
Make screen > Right Sidebar > Setting
2.6 Auto COM with FT300
Make screen > Right Sidebar > Setting
2.7 Force-Control with FT300
Make screen > Command Actions > Force