Socket Communication Basic Usage Guide v2.0
1. Basic Concept Description
There are two main methods for application development using TCP/IP socket communication provided by Rainbow Robotics.
1.1 Data Exchange based on General TCP communication
- The Rainbow Robotics system can be either a server or a client of TCP/IP.
- This is a method of sending and receiving only valid data (numbers, arrays, character strings, etc.) with the other PC/system.
- The user configures the program using the UI program of Rainbow Robotics.
- If specific data is sent from the other party's PC/system, it is possible to perform an action/program using that data.
1.2 Robot control via External Script command
- Rainbow Robotics system acts as a server for TCP/IP. (using ports 5000/5001)
- Rather than using Rainbow Robotics' UI program, it is a way for users to create their own operating programs in their preferred development language.
- In accordance with the dedicated script grammar stipulated by Rainbow Robotics, the user just needs to send a string.
- User development language is irrelevant. (Java, C++, Python, etc.)
- All user need to do is to send the script string that conforms to the RB grammar. (to the specified port.)
For TCP/IP socket communication, the IP address of the Rainbow Robotics control box must be set in advance.
IP address and Netmask can be set through UI Program.
It can be set and checked in the ‘System’ menu of the ‘Setup’ page.
2. [Method 1] Data Exchange Based on General TCP Communication
- RB system can be either a server or a client of TCP/IP.
- If RB system is the server, the user system is the client and if the RB system is a client, user can make user’s system act as a server.
User can choose which one to use as a server according to user’s convenience. - This is a method of sending and receiving only valid data (numbers, arrays, character strings, etc.) with the other party's PC/system.
- User configures the robot program using RB's UI program.
- If the other party's PC/system sends specific data, the operation/program can be executed using that data.
- The format of data exchanged is basically Ascii String.
- Both systems send and receive data in the form of strings. If necessary, string functions can be utilized to convert a string data into a number or an array, etc.
- IP addresses of both systems are configurable by the user.
- For communication ports, all numbers are available except for reserved port numbers (ports less than 1000, 2000, 2001, 5000, 5001).
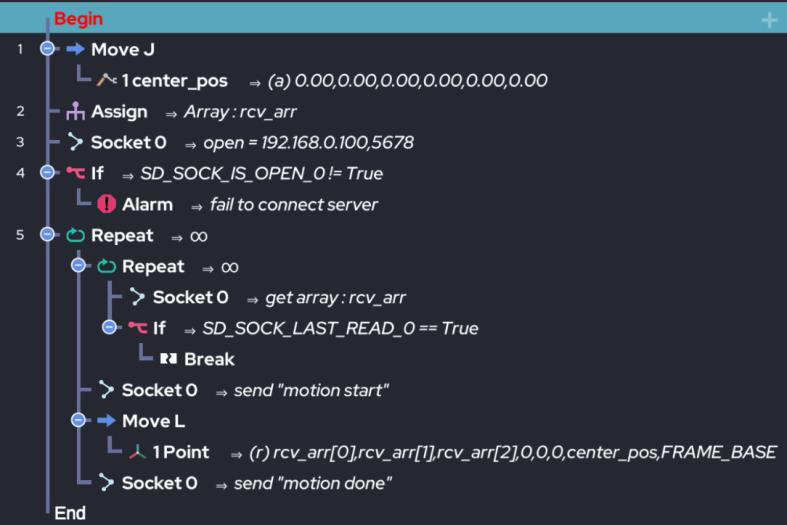
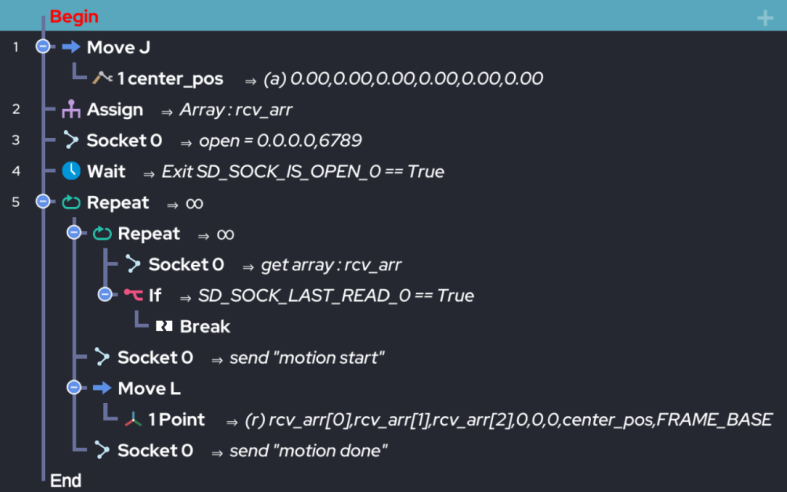
The example below is a simple example of robot program configuration when [Method 1] is used.
This guide does not separately explain the examples below and the functions used in the examples.
For a description of each function and various examples, refer to the separate ‘Socket Communication Example Document’.
3. [Method 2] Robot Control via External Script Command
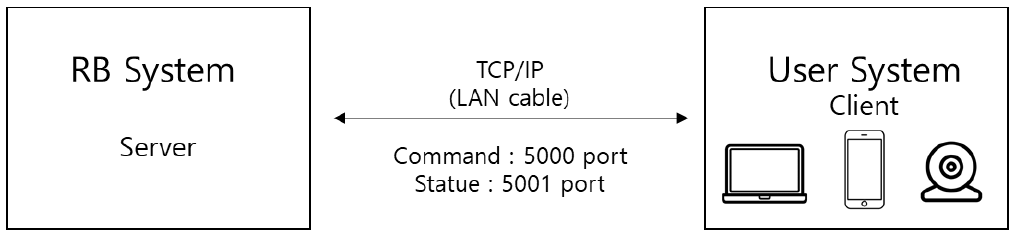
- RB system operates as a TCP/IP server. (Port 5000 & 5001)
- Rather than using RB's UI program, it is a way for users to create their own operating programs in their preferred development language.
- According to the dedicated script syntax stipulated by RB, users just need to send a string.
- User’s development language is irrelevant. (JAVA, C#, C/C++, Python, etc.)
- Regardless of the user's development language, just send a script string that matches the grammar. (to specific ports)
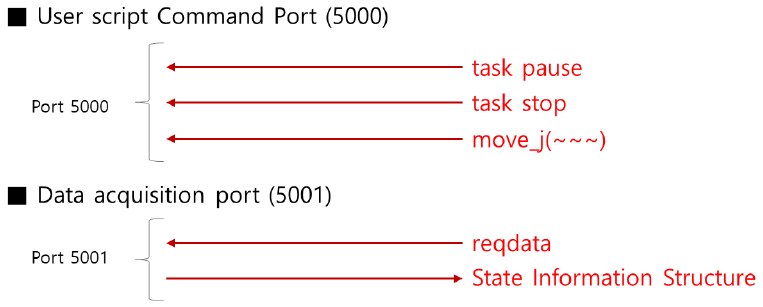
- Port 5000 is used to send user commands to the RB system. (movement command, etc.)
- Port 5001 is used to deliver the status information of the RB system to the user. (joint information, movement state information, etc.)
The external control script is described in “Manual Appendix E”. There are two types of robot motion command script.
- Descriptive script (described in the ‘Product manual-Appen.E’)
- Function-type script (described in the ‘UI script manual’)
It doesn't matter which type user use. Just send a command to port 5000.
3.1 Example 1 - Move J
The example below is an example of both descriptive and functional type for moving 6 joints to 0,45,90,0,90,0 degrees with Move J.
3.1.1 Descriptive script Type:
“jointall 0.3, 0.1, 0, 45, 90, 0, 90, 0”3.1.2 Functional-type script Type:
“move_j(jnt[0, 45, 90, 0, 90, 0], 60, 80)”3.2 Example 2 - Move L
The example below is an example of both descriptive and functional type for moving TCP to 100,200,300,0,90,0 with Move L.
3.2.1 Descriptive script Type:
“movetcp 0.2, 0.1, 100, 200, 300, 0, 90, 0”3.2.2 Functional-type script Type:
“move_l(pnt[100, 200, 300, 0, 90, 0], 100, 300)”4. ETC
Rainbow Robotics provides an example program for 'External Control Script'.
- The description of the example program is described in Appendix E of the product manual.
- Example programs are available in two languages. (C++ & C#)
- The example program consists of C++ and C#, but as described above, the user-developed language is irrelevant.
4.1 Example Program 1
- C++ Language
- Qt (IDE Program) 5.8 environment.
- Get v5.8 from https://www.qt.io/
4.2 Example Program 2
- C# Language
- Microsoft Visual Studio (VS) environment