Specification
URDF
URDF files are available from the Downloads page.
CAD
CAD files are available from the Downloads page.
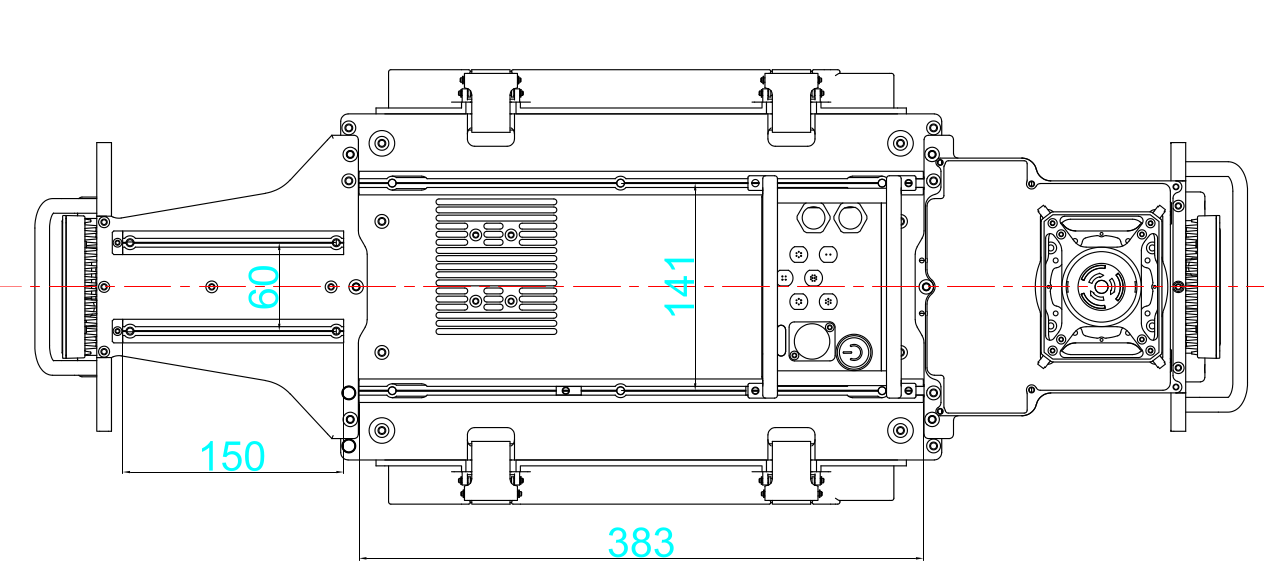
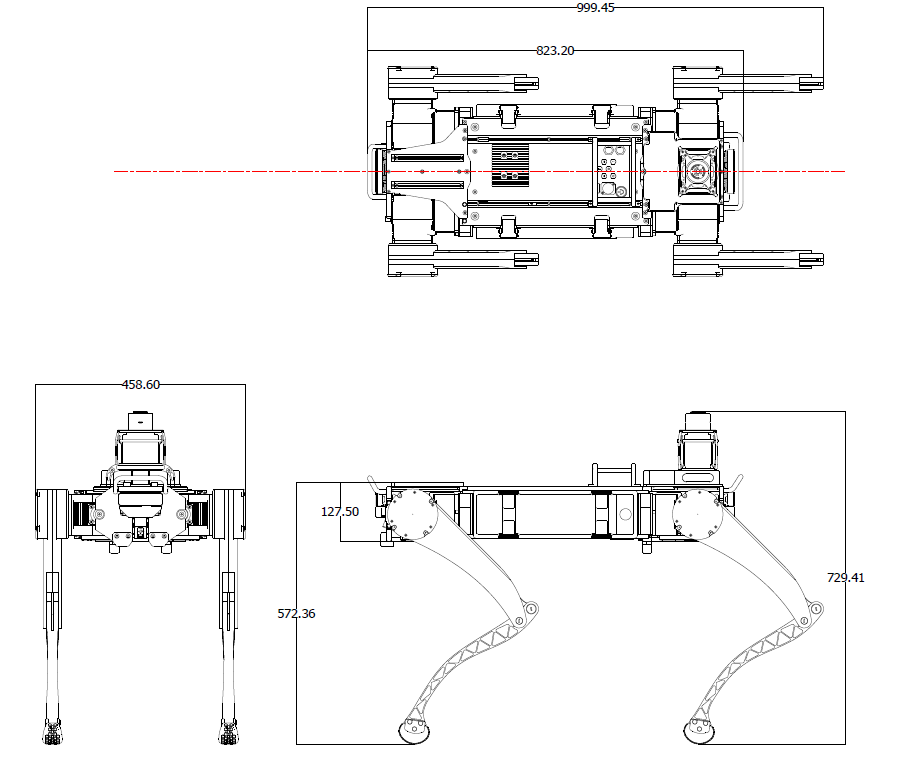
Robot Dimension
Joint Specification
Joint Specification
| Category | Hip Roll Joint | Hip Pitch Joint | Knee Joint |
|---|---|---|---|
| Max Angular Vel | 14.4 rad/s | 14.4 rad/s | 11.15 rad/s |
| Nominal Torque | 40 Nm | 40 Nm | 50 Nm |
| Max Torque | 104 Nm | 104 Nm | 140 Nm |
| Rotor Inertia | 0.014058265 | 0.014058265 | 0.0214816 |
| Joint Range | Left: -30° ~ 43° Right: -43° ~ 30° | No limit | -158.1° ~ -19.3° |
IMU Sensor Specification
| Parameter | Specification |
|---|---|
| Gyroscope In-Run Bias | 5 °/hr |
| Gyroscope Range | ±2,000 °/sec |
| Accelerometer Range | ±16 g |
| Accelerometer In-Run Bias | < 0.04 mg |
| IMU Data Update Rate | 800 Hz |
| Extended Kalman Filter Update Rate | 400 Hz |
- IMU Offset
- Robot body Center to IMU Center (x,y,z) : (0.00665, 0, -0.0404)