Visual Sensors
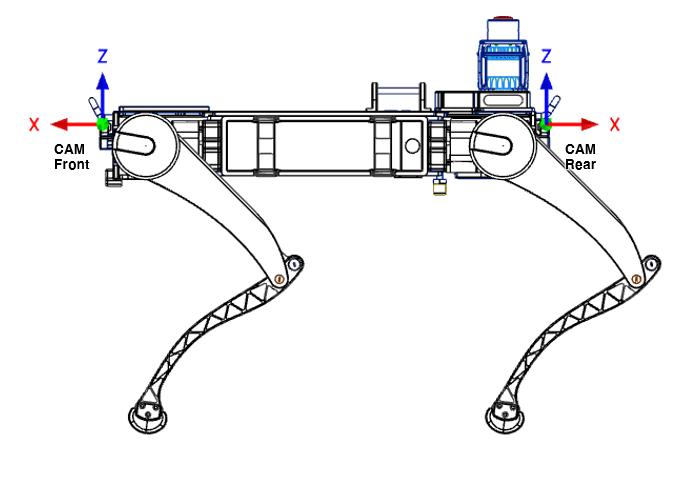
Front & Rear Cameras
Overview Illustration
Model : OAK-D Pro Wide
Product Link
For detailed intrinsic and extrinsic parameters
FOV
- Stereo
- 150° / 127° / 79.5° (DFOV / HFOV / VFOV)
- Stereo
RGB Camera
- IMX378
- 120° / 95° / 93° (DFOV / HFOV / VFOV)
- OV9782
- 150° / 127° / 79.5° (DFOV / HFOV / VFOV)
- IMX378
Base to Camera TF (Transformation) Matrices
Camera RGB TF Depth TF Front Camera [ 0.0000 0.0000 1.0000 0.388031 ] [ -1.0000 0.0000 0.0000 0.000000 ] [ 0.0000 -1.0000 0.0000 0.037764 ] [ 0.0000 0.0000 0.0000 1.000000 ][ 0.0000 -1.0000 0.0000 0.388031 ] [ 0.0000 0.0000 -1.0000 -0.037500 ] [ 1.0000 0.0000 0.0000 0.037764 ] [ 0.0000 0.0000 0.0000 1.000000 ]Rear Camera [ 0.0000 0.0000 -1.0000 -0.388031 ] [ 1.0000 0.0000 0.0000 0.000000 ] [ 0.0000 -1.0000 0.0000 0.037764 ] [ 0.0000 0.0000 0.0000 1.000000 ][ 0.0000 0.0000 -1.0000 -0.388031 ] [ 1.0000 0.0000 0.0000 0.037500 ] [ 0.0000 -1.0000 0.0000 0.037764 ] [ 0.0000 0.0000 0.0000 1.000000 ]
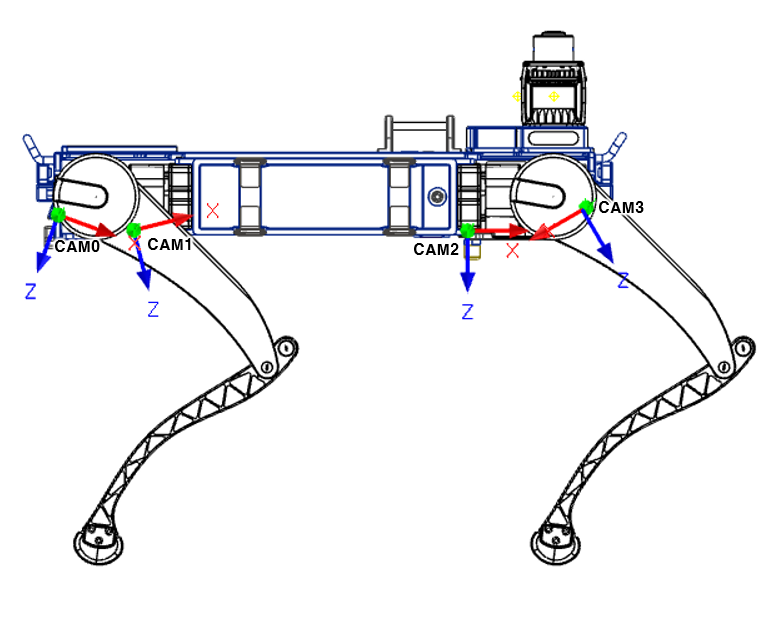
Ground-view camera
Overview Illustration
Model
- Intel Realsense D430
- Product Link
Base to Camera TF (Transformation) Matrices
Camera Depth TF Camera 0 [ -0.939693 0.000000 0.342020 0.364620 ] [ 0.000000 1.000000 0.000000 0.000000 ] [ -0.342020 0.000000 -0.939693 -0.026630 ] [ 0.000000 0.000000 0.000000 1.000000 ]Camera 1 [ -0.970296 0.000000 -0.241922 0.260530 ] [ 0.000000 1.000000 0.000000 0.000000 ] [ 0.241922 0.000000 -0.970296 -0.047590 ] [ 0.000000 0.000000 0.000000 1.000000 ]Camera 2 [ -1.000000 0.000000 0.000000 -0.195150 ] [ 0.000000 1.000000 0.000000 0.006500 ] [ 0.000000 0.000000 -1.000000 -0.048320 ] [ 0.000000 0.000000 0.000000 1.000000 ]Camera 3 [ 0.861341 -0.0909518 -0.499820000 -0.352993 ] [ -0.105042 -0.9944680 -5.69736e-05 -1.1e-050 ] [ -0.497050 0.0525513 -0.866129000 -0.020514 ] [ 0.000000 0.0000000 0.000000000 1.000000 ]
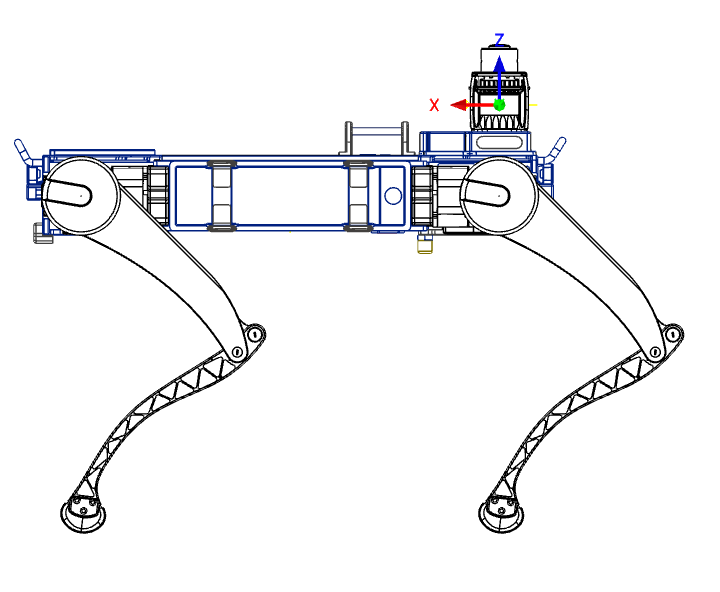
LiDAR (OS1-32)
Overview Illustration
Model
Base to LiDAR(OS1-32) TF (Transformation) Matrices
Base to LiDAR TF LiDAR [ 0.000000 0.000000 0.000000 -0.312600 ] [ 0.000000 1.000000 0.000000 -0.000033 ] [ 0.000000 0.000000 1.000000 -0.136850 ] [ 0.000000 0.000000 0.000000 1.000000 ]
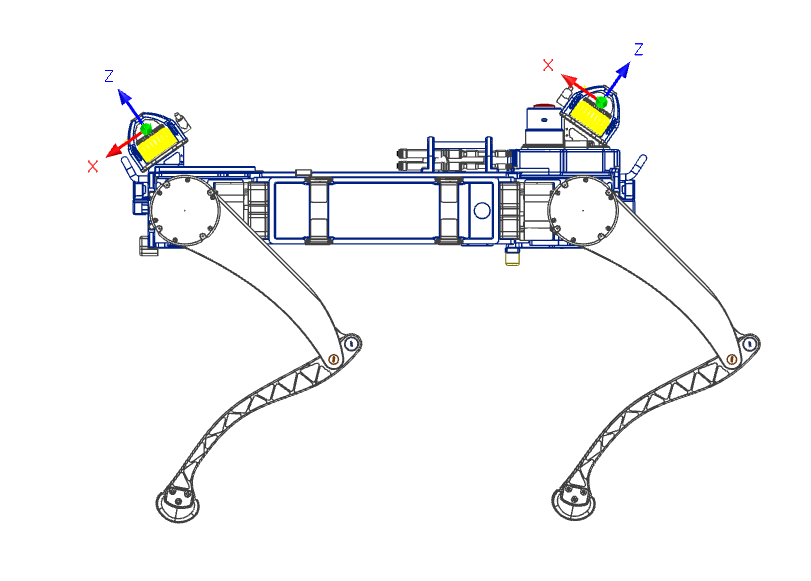
LiDAR (MID-360)
Overview Illustration
Model
- Product Link
Base to LiDAR(Mid-360) TF (Transformation) Matrices
Base to LiDAR TF LiDAR-Front [ 0.81920 0.00000 0.57358 0.37282 ] [ 0.00000 1.00000 0.00000 0.00000 ] [ -0.57358 0.00000 0.81915 0.12777 ] [ 0.0000 0.00000 0.00000 1.00000 ]LiDAR-Rear [ 0.81920 0.00000 -0.57358 -0.34100 ] [ 0.00000 1.00000 0.00000 0.00000 ] [ 0.57358 0.00000 0.81915 0.16963 ] [ 0.00000 0.00000 0.00000 1.00000 ]