Coordinate System
Global Coordinate
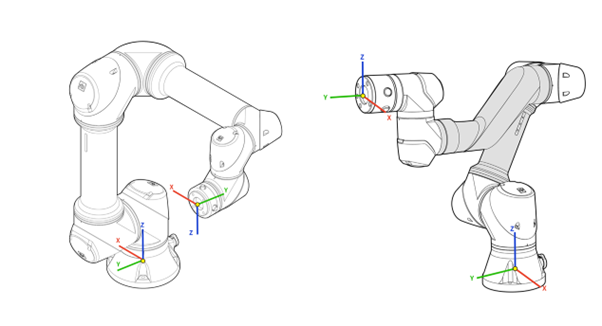
Once the robot is fixed with the coordinate system fixed to the base of the robot, the global coordinate system is also fixed.
The center of the base surface is the origin. Set the robot direction to the +Z direction from the origin and the connector direction to the +Y direction from the origin.
Local Coordinate
Coordinate system fixed to TCP (Tool Center Point) of the robot, the direction of the axis changes in real time by setting or moving the TCP offset.
Set TCP as the origin and set the robot direction from the origin to the +Y direction and the teach button direction from the origin to the +Z direction.