Robot Operating Range
An RB robot consists of six joints. The axes of rotation and joint limits are illustrated in the following section.
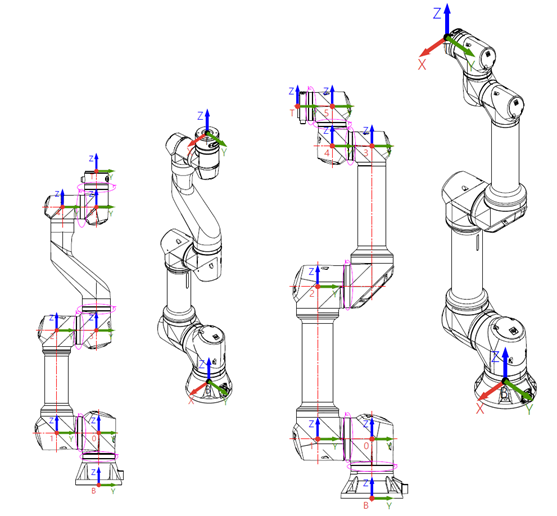
| Joint | Range |
|---|---|
| J1 | ± 360° |
| J2 | ± 360° |
| J3 | ± 165°/ ± 150° |
| J4 | ± 360° |
| J5 | ± 360° |
| J6 | ± 360° |
An RB robot consists of six joints. The axes of rotation and joint limits are illustrated in the following section.
| Joint | Range |
|---|---|
| J1 | ± 360° |
| J2 | ± 360° |
| J3 | ± 165°/ ± 150° |
| J4 | ± 360° |
| J5 | ± 360° |
| J6 | ± 360° |