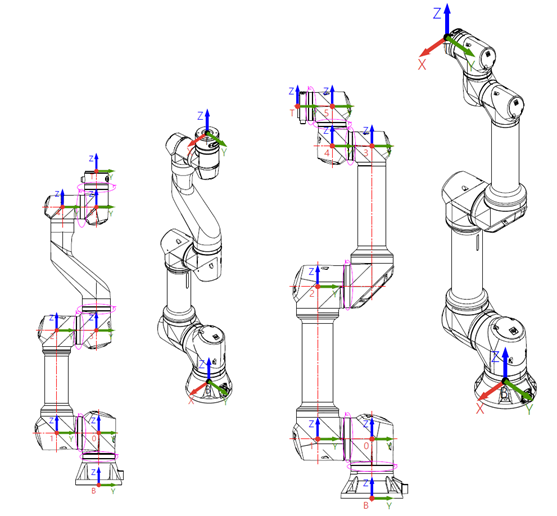
로봇의 구동 범위
RB 로봇 팔은 6 개의 축으로 이루어져 있으며 각 관절 축의 구동 범위는 다음과 같습니다.
| Joint | 구동 범위 |
|---|---|
| J1 | ± 360° |
| J2 | ± 360° |
| J3 | ± 165°/ ± 150° |
| J4 | ± 360° |
| J5 | ± 360° |
| J6 | ± 360° |
RB 로봇 팔은 6 개의 축으로 이루어져 있으며 각 관절 축의 구동 범위는 다음과 같습니다.
| Joint | 구동 범위 |
|---|---|
| J1 | ± 360° |
| J2 | ± 360° |
| J3 | ± 165°/ ± 150° |
| J4 | ± 360° |
| J5 | ± 360° |
| J6 | ± 360° |