Set-up (I/O 1)
컨트롤 박스의 GPIO포트의 기능을 설정할 수 있는 곳입니다.
1. 제어박스 디지털 입력 기능 정의
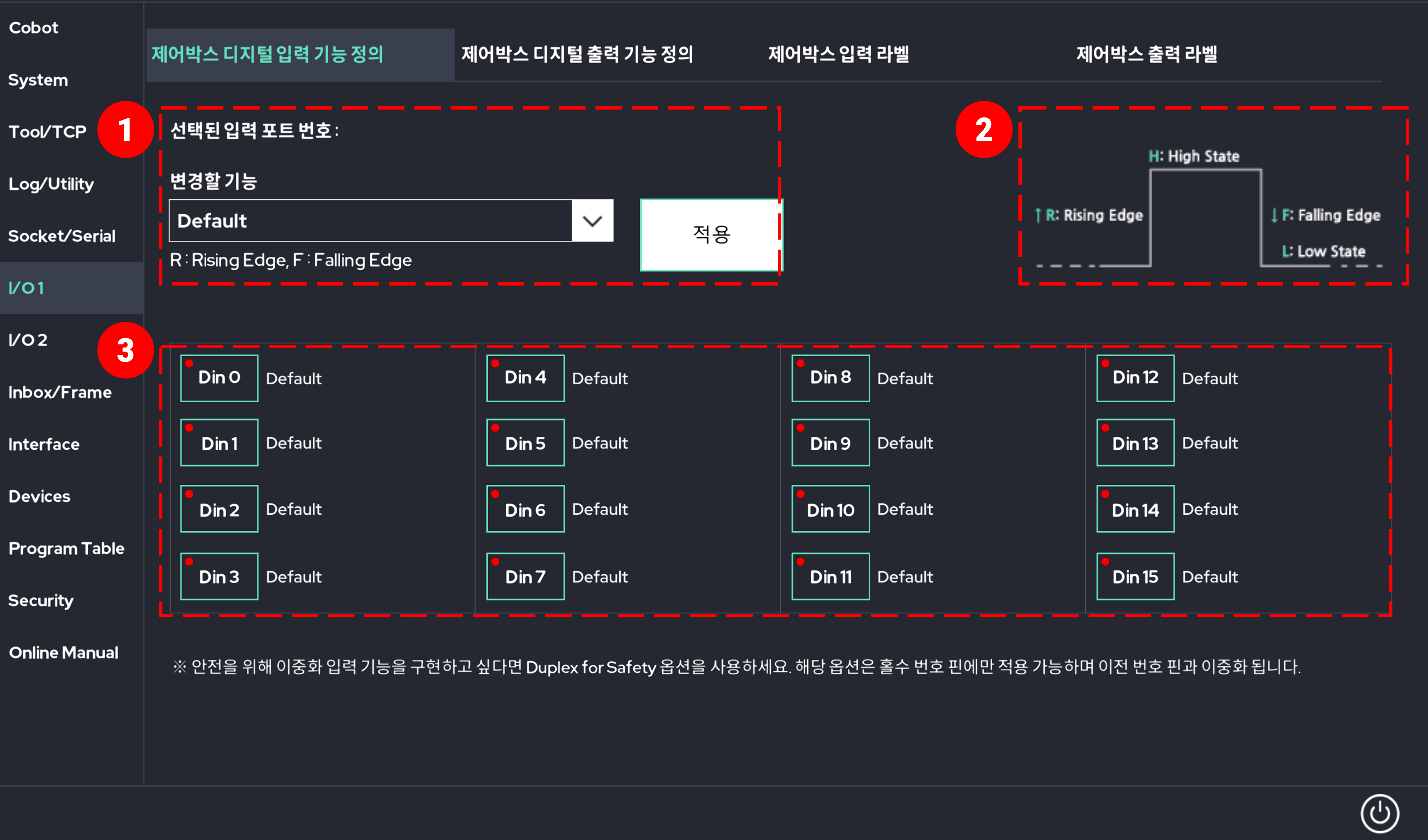
- 기능을 변경할 입력 포트를 선택합니다.
- R : 임의의 디지털 입력 포트에 적용한 기능은 디지털 입력 펄스가 Rising Edge에 기능이 활성화 됩니다.
- H : 임의의 디지털 입력 포트에 적용한 기능은 디지털 입력 펄스가 High State에 기능이 활성화 됩니다.
- F : 임의의 디지털 입력 포트에 적용한 기능은 디지털 입력 펄스가 Falling Edge에 기능이 활성화 됩니다.
- L : 임의의 디지털 입력 포트에 적용한 기능은 디지털 입력 펄스가 Low State에 기능이 활성화 됩니다.
- R : 임의의 디지털 입력 포트에 적용한 기능은 디지털 입력 펄스가 Rising Edge에 기능이 활성화 됩니다.
- 16개의 디지털 입력 포트에 적용된 기능을 표시합니다.
2. 제어박스 디지털 출력 기능 정의
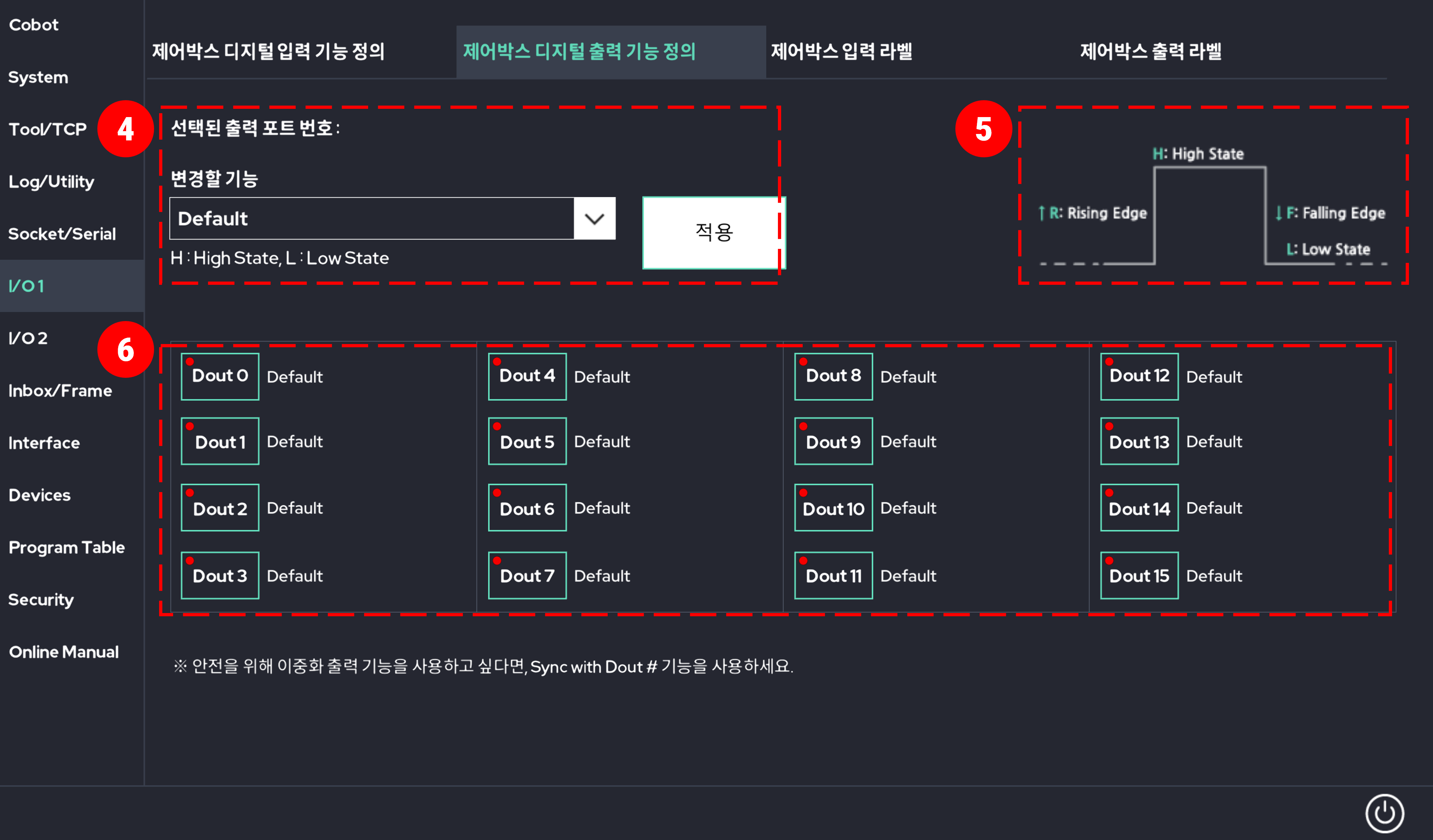
- 기능을 변경할 출력 포트를 선택합니다.
- R : 임의의 디지털 출력 포트에 적용한 기능은 디지털 출력 펄스가 Rising Edge에 기능이 활성화 됩니다.
- H : 임의의 디지털 출력 포트에 적용한 기능은 디지털 출력 펄스가 High State에 기능이 활성화 됩니다.
- F : 임의의 디지털 출력 포트에 적용한 기능은 디지털 출력 펄스가 Falling Edge에 기능이 활성화 됩니다.
- L : 임의의 디지털 출력 포트에 적용한 기능은 디지털 출력 펄스가 Low State에 기능이 활성화 됩니다.
- R : 임의의 디지털 출력 포트에 적용한 기능은 디지털 출력 펄스가 Rising Edge에 기능이 활성화 됩니다.
- 16개의 디지털 출력 포트에 적용된 기능을 표시합니다.
3. 제어박스 입력 라벨

- 사용할 이름을 입력합니다.
- 이름을 설정할 입력 포트를 선택합니다.
4. 제어박스 출력 라벨

- 사용할 이름을 입력합니다.
- 이름을 설정할 출력 포트를 선택합니다.
5. 컨트롤 박스 입력 포트 기능
컨트롤 박스의 입력 포트(Din 0 ~ Din 15)의 기능은 아래와 같은 특수 기능으로 설정 가능합니다(R = Rising Edge, F = Falling Edge, H = High State).
주의
- Digital 입력을 사용하기 전에 제조사가 제공하는 디지털 입력 포트의 전기적 특성을 충분히 숙지하고 사용하시기 바랍니다.
- 기본 모드(GPIO)
- 프로그램 시작 1회 모드(Rising Edge)
- 프로그램 중지(Rising Edge)
- 프로그램 일시정지(Rising Edge)
- R = 직접 교시 모드 켜기 / F = 직접 교시 모드 끄기
- R = 속도 100% / F = 속도 0%
- R = 리얼 모드로 전환 / F = 시뮬레이션 모드로 전환
- R = 로봇 초기화
- H = High State인 경우 충돌 기능 끄기
- H = 자동 초기화 키 (Auto-Initialization Key)
- R = 외부 충돌로 인한 일시 정지 상태 해제
- R = UI 프로그램에 Point 기능 추가 (Rising Edge)
- R = 프로그램 시작 반복 모드 (Rising Edge)
- R = Begin 위치로 이동
- R = 프로그램 재개
- H = Quick Freedrive Change
- R = 프로그램 일시 정지 / F = 프로그램 재개
- F = 프로그램 일시 정지 / R = 프로그램 재개
- H = 속도 조절 바 100% / L = 속도 조절 바 0%
- R = 기본 설정 프로그램 로드
- F = 로봇 팔 전원 끄기
- R = Touch Sensing
- F = Touch Sensing
- H = No Arc
- H = Program Start Block
- R = Ext.Joint0 Plus / F = stop
- R = Ext.Joint0 Minus / F = stop
- R = Ext.Joint1 Plus / F = stop
- R = Ext.Joint1 Minus / F = stop
- R = Ext.Joint2 Plus / F = stop
- R = Ext.Joint2 Minus / F = stop
- H = Safety Speed
- F = UserCoord0 ←TCP frame
- F = UserCoord1 ←TCP frame
- F = UserCoord2 ←TCP frame
- F = Load & Run Program Table
- R = Start Prog.(Once) / F = Stop Prog.
- R = Start Prog.(Repeat) / F = Stop Prog.
- F = Change Global Pinpoint #’s Prog.
- R = EXT. Joint 0 Slow Plus / F = Stop
- R = EXT. Joint 0 Slow Minus / F = Stop
- R = EXT. Joint 1 Slow Plus / F = Stop
- R = EXT. Joint 1 Slow Minus / F = Stop
- R = EXT. Joint 2 Slow Plus / F = Stop
- R = EXT. Joint 2 Slow Minus / F = Stop
- R = Reset SOS
- F = Reset SOS
- R = Delete Point
- R = Add ARC-ON
- R = Add ARC-Off
- H = Speed 75% / L = 0%
- H = Speed 50% / L = 0%
- H = Speed 25% / L = 0%
- H = Speed 10% / L = 0%
- F = Pause Program
- H = Block Freedrive Button
- L = Block Freedrive Button
- Duplex for Safety
- F = Stop Program
6. 컨트롤 박스 출력 포트 기능
컨트롤 박스의 출력 포트(Dout 0 ~ Dout 15)의 기능은 아래와 같은 특수 기능으로 설정 가능합니다(R = Rising Edge, F = Falling Edge, H = High State).
특수 기능으로 설정된 출력 포트는 티칭 프로그램에서 일반적인 용도로 사용하지 못합니다.
주의
- Digital 출력을 사용하기 전에 제조사가 제공하는 디지털 출력 포트의 전기적 특성을 충분히 숙지하고 사용하시기 바랍니다.
- 기본 모드(GPIO)
- H = 프로그램/로봇 실행 중 / L = Idle 상태
- L = 프로그램/로봇 실행 중/ H = Idle 상태
- H = 외부충격 감지
- H = 직접 교시 모드 실행 상태
- 선택 포트와 같은 번호의 디지털 입력 신호 전달
- 툴 플랜지 입력 포트 0번 신호 전달
- 툴 플랜지 입력 포트 1번 신호 전달
- H = 로봇 활성화 상태 / L = 활성화되지 않음
- H = 리얼 모드 상태 / L = 시뮬레이션 모드 상태
- H = 로봇 동작 중 / L = Idle 상태
- L = 로봇 동작 중 / H = Idle 상태
- H = 로봇 초기화 (활성화) 실패 상태
- H = 로봇 팔에 전원 인가 상태 / L = 팔에 전원 비인가 상태
- H = 충돌 감지 켜져있는 상태 / L = 충돌 감지 기능 꺼져있는 상태
- H = 일시 정지 상태
- H = Inbox 0번에 Trap이 발생한 상태
- H = Inbox 1번에 Trap이 발생한 상태
- PWM 모듈로 사용
- H = 티칭팬던트가 연결됨
- H = 프로그램이 MAKE 창에서 실행됨
- H = 프로그램이 PLAY 창에서 실행됨
- H = 컨베이어 모드 실행 중
- H = 컨트롤 박스 부팅 완료
- H = 힘 제어 모드 실행 중
- PC Alive Pulse
- H = 속도 조절 바 100%
- H = 최근 프로그램 불러오기 성공
- H = TCP is in InBox 0
- H = TCP is in InBox 1
- H = Is Alarm
- H = Robot posture is Begin posture
- H = Emergency Teaching Enable
- H = Prog. Run in Sub.P area
- H = Normal Program Run / L = Others
- H = Normal Program Run / H = Others
- H = Hand Controller F1 pressed
- H = Hand Controller F2 pressed
- H = Hand Controller F3 pressed
- H = Hand Controller F4 pressed
- L = TCP is in InBox 0
- L = TCP is in InBox 1
- Sync with Dout 0
- Sync with Dout 1
- Sync with Dout 2
- Sync with Dout 3
- Sync with Dout 4
- Sync with Dout 5
- Sync with Dout 6
- Sync with Dout 7
- Sync with Dout 8
- Sync with Dout 9
- Sync with Dout 10
- Sync with Dout 11
- Sync with Dout 12
- Sync with Dout 13
- Sync with Dout 14
- Sync with Dout 15
- H = Is SOS State
- L = Is SOS State
- H = EMG Button Released / L = Pressed
- L = EMG Button Released / H = Pressed
- L = Robot Speed under 250mm/s
- H = Robot Speed under 250mm/s
- H = Near Joint Limit
- H = Robot Arm under Activating
- H = Under Program Loading