Set-up (Tool/TCP)
1. Default Tool
설치된 툴에 관한 설정을 할 수 있습니다.
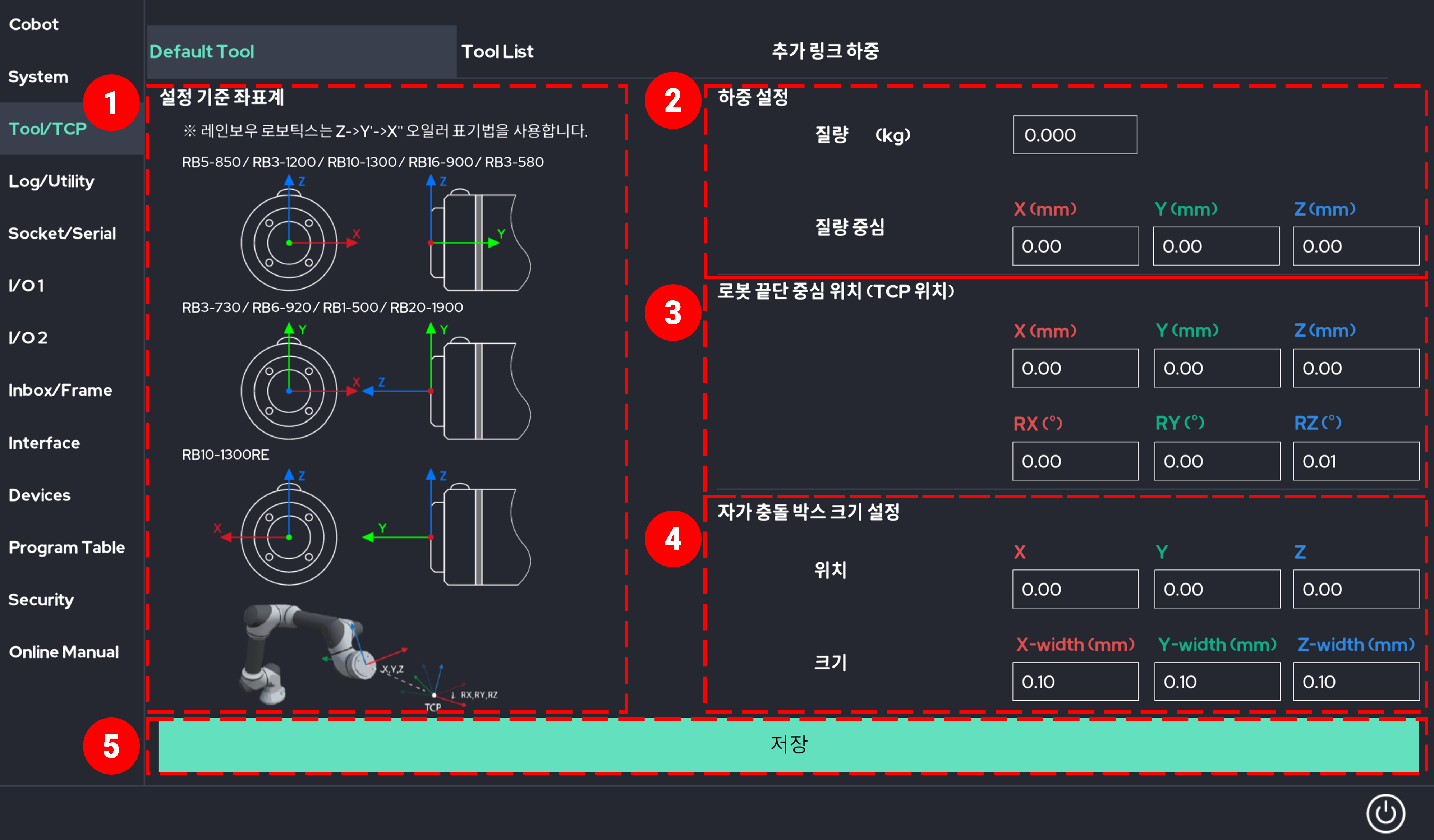
- 로봇 모델 별 로봇 팔 말단 중심(Tool Center Point, TCP) 좌표계를 나타냅니다.
해당 좌표계를 기준으로 우측의 수치를 입력합니다. - 로봇에 걸리는 하중에 관한 설정을 합니다.
질량은 ‘Mass’란에 (단위 kg) 로봇 모델 별 가반하중에 따라 입력 범주가 다릅니다.
질량 중심까지의 거리는 ‘Center of gravity’란에(단위 mm) 입력합니다. - TCP 좌표계를 설정합니다. 선형 위치(X, Y, Z)와 회전각도(RX, RY, RZ)를 설정할 수 있습니다.
- TCP 좌표계를 기준으로 툴 영역의 범위를 설정합니다. 해당 범위 안은 자가충돌영역으로 처리됩니다.
- 변경된 세팅을 저장합니다.
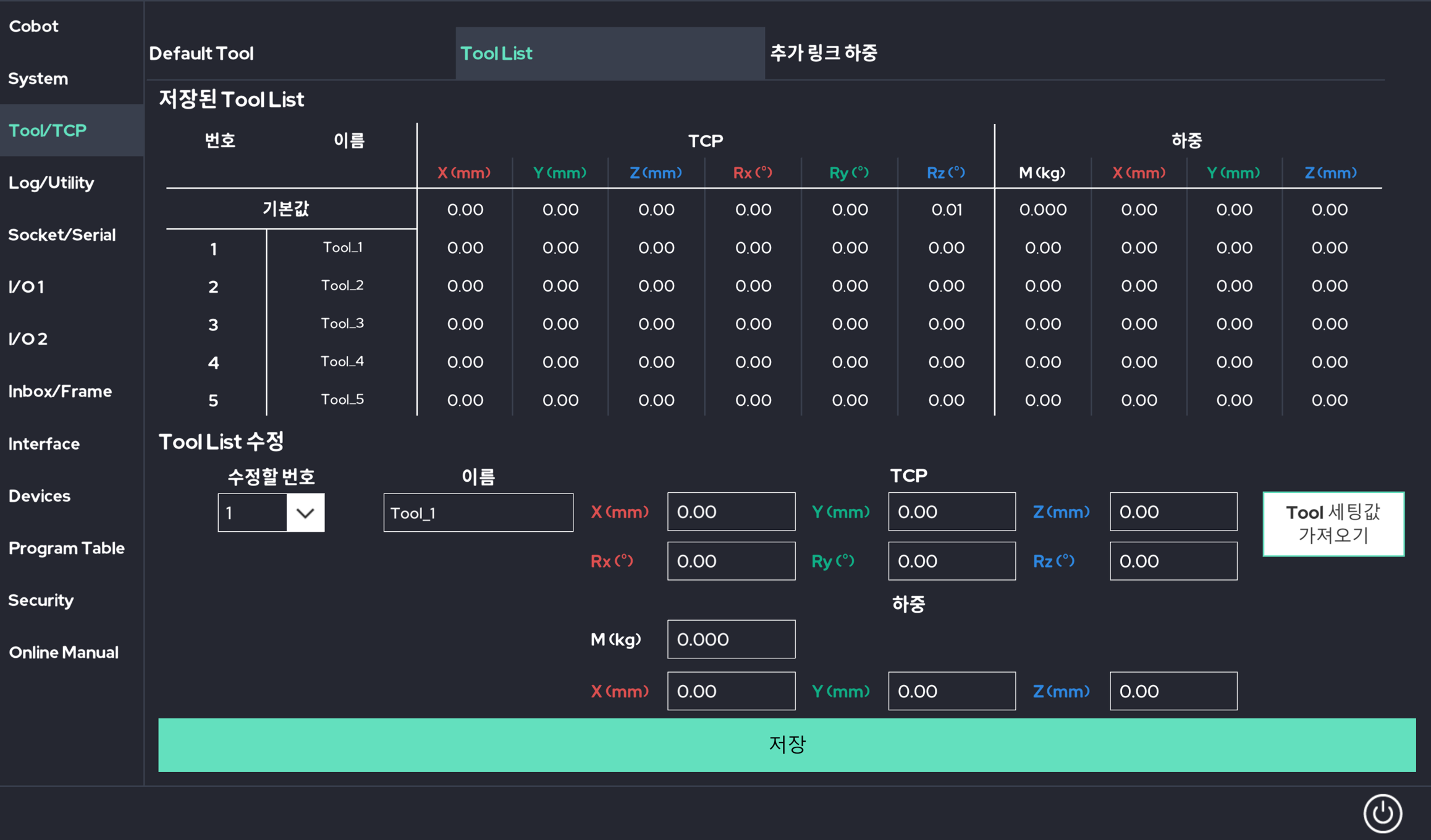
2. Tool List
5개의 Tool 값(TCP, CoG, payload)을 저장할 수 있습니다.
3. 추가 링크 하중
Shoulder와 Elbow에 용접기 피더 등 추가적인 장치를 달 수 있습니다.
