Set-up (System)
표시 단위, 날짜 및 시간, 시스템 업데이트 등을 설정할 수 있습니다.
1. 일반

- UI 로봇 모델 : UI상에 있는 로봇 모델을 변경합니다.
- 시간 형식 : 시간의 형식을 12시간 단위 혹은 24 시간 단위로 설정할 수 있습니다.
- 언어 : UI의 언어를 설정할 수 있습니다.
- 명령어 아이콘 언어 : 명령어 아이콘 언어를 설정할 수 있습니다.
- 고급 프로그램 운영 모드 : 프로그램을 처음부터 시작 위치를 지정할 수 있습니다.
- 소프트웨어 업데이트 : 태블릿의 소프트웨어를 제어박스에 설치할 수 있습니다. 해당 기능으로 제어박스의 소프트웨어 버전을 업그레이드/다운그레이드 할 수 있습니다.
- UI 로봇 모델 : UI상에 있는 로봇 모델을 변경합니다.
- 로봇 자동 활성화 기능 : 로봇을 활성화 하는 방법을 선택할 수 있습니다.
‘사용 안 함’으로 설정할 경우 매번 ‘활성화’ 버튼을 눌러 활성화를 진행합니다.
‘자동 활성화 with 키’의 경우 임의의 디지털 입력을 통해 활성화를 진행합니다.
‘자동활성화 without 키’의 경우 어떠한 조작 없이 제어박스의 전원을 켬과 동시에 활성화를 진행합니다. - 기본 작업 파일 : 제어박스를 부팅할 경우 초기 파일을 설정할 수 있습니다. 다른 파일을 설정하지 않을 경우 ‘default’로 설정됩니다.
- 시스템 ID(0~3000) : 시스템의 아이디를 부여할 수 있습니다.
- 로봇팔 LED 인디케이터 : 로봇팔 링크에 있는 LED를 활성화/비활성화 할 수 있습니다.
- SOS Mode : Simple SOS와 SF SOS
- Default Joint-Jog Speed : 기본 관절 속도를 정할 수 있습니다.
- Default Linear-Jog Speed : 기본 선형 속도를 정할 수 있습니다.
- 외부 F/T 센서 : 외부 F/T 센서의 모델을 설정할 수 있습니다.
- 고 해상도 ADC 모드 : 고 해상도 ADC 모드를 활성화/비활성화 할 수 있습니다.
- 로봇 자동 활성화 기능 : 로봇을 활성화 하는 방법을 선택할 수 있습니다.
변경된 세팅을 저장합니다.
2. Software PLC
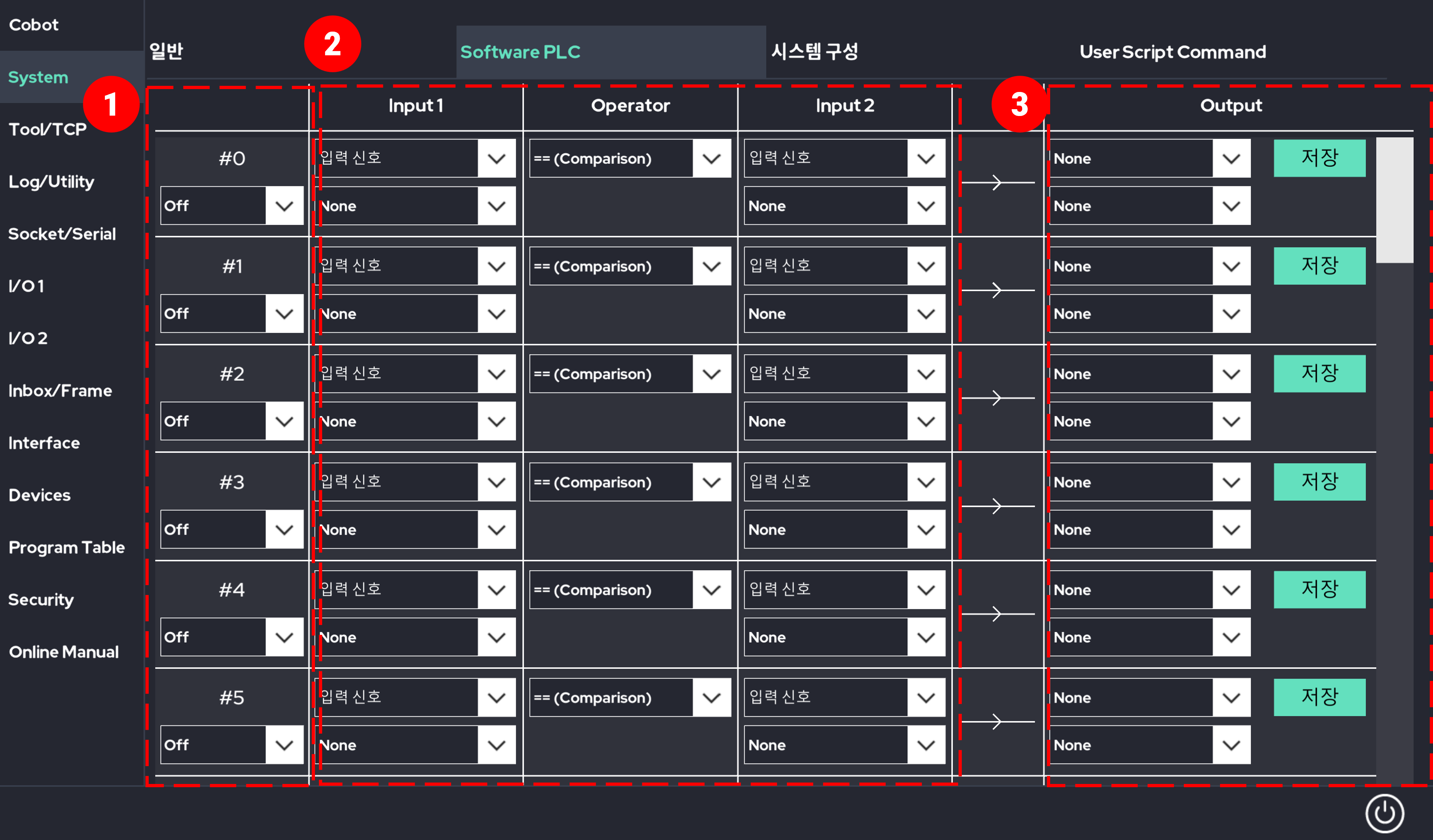
- Software PLC를 사용하는 방법을 설정합니다.
프로그램 실행 유무에 상관없이 내용을 적용하는 경우 (On(Always)),
프로그램을 실행하지 않을 때 적용할 경우 (On(Idle)),
프로그램을 실행할 때 적용할 경우 (On(Non-Idle)) 입니다. - 입력 신호, 시스템 상태정보, 시스템 파라미터, 통신 데이터 등 다양한 파라미터를 활용하여 논리를 구성할 수 있습니다.
- 입력 신호를 이용하여 출력 신호의 논리를 구성할 수 있습니다.
3. 시스템 구성
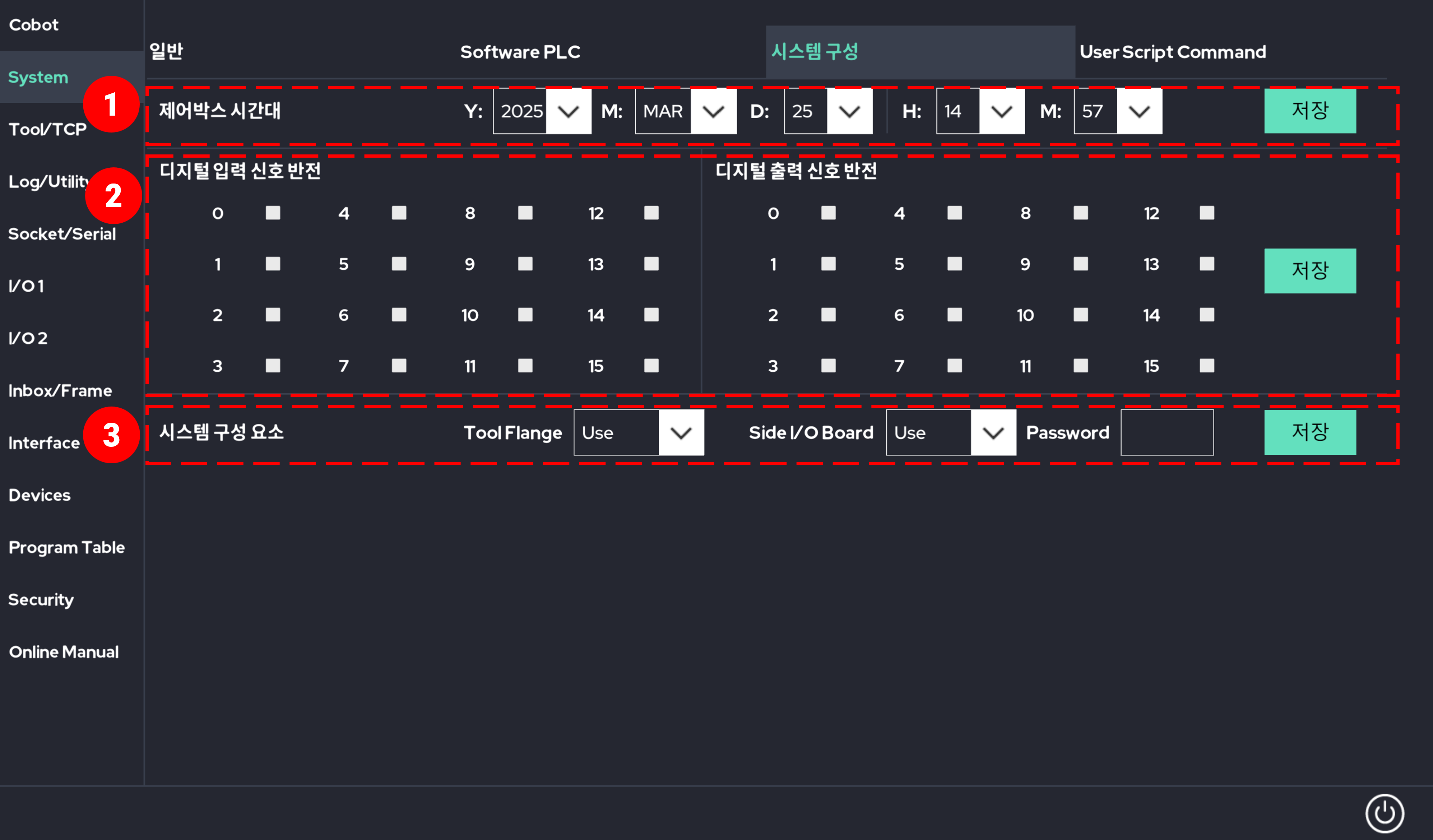
- 제어박스 시간대 : 제어박스의 현재 시간을 설정할 수 있습니다.
- 디지털 입력 신호 반전/출력 신호 반전 : 개별 포트의 신호를 반전할 수 있습니다.
- 시스템 요소 : 툴플랜지, IO보드 사용 여부를 설정할 수 있습니다.
4. User Script Command
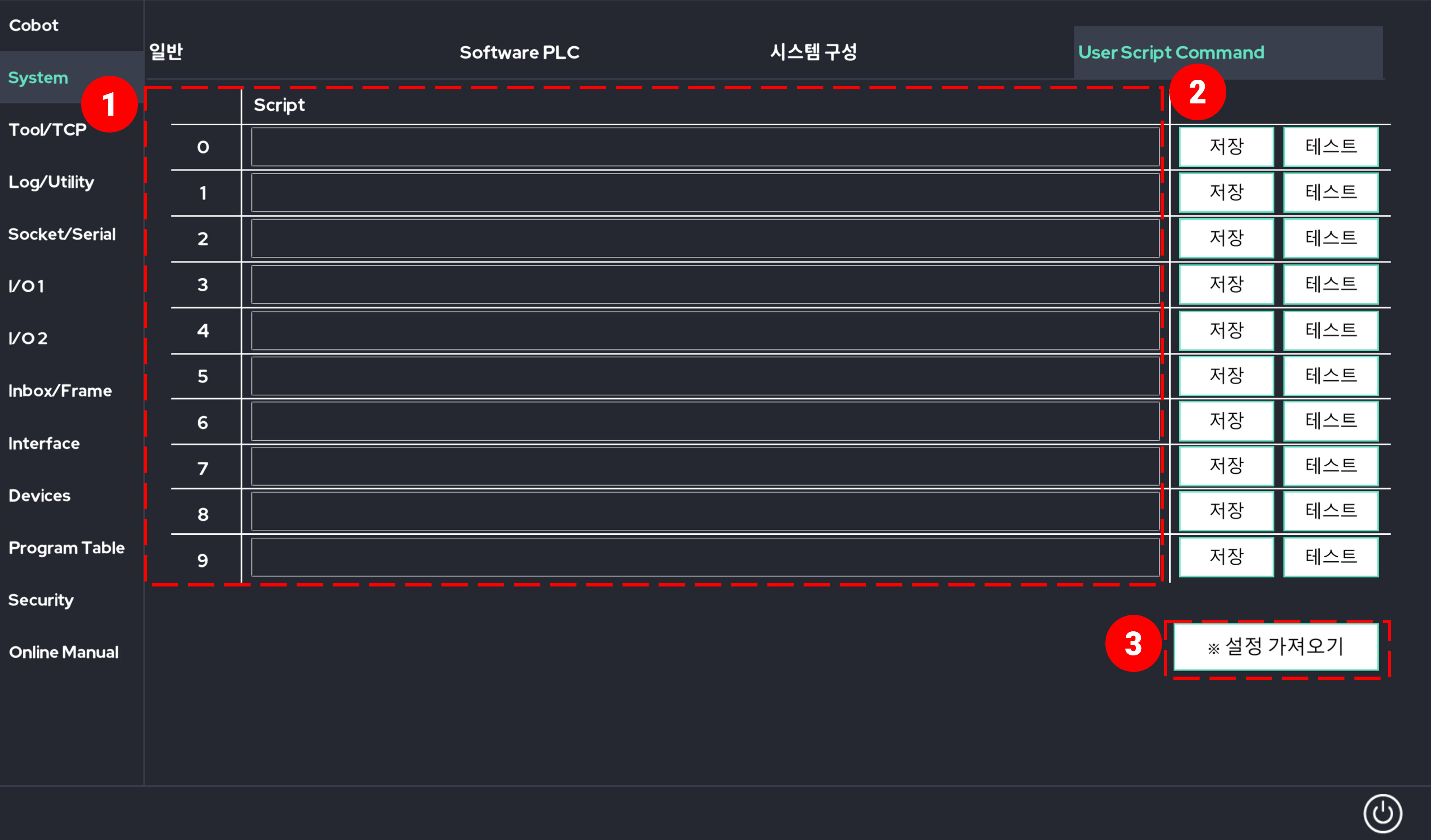
- UI_Script 내의 사용자가 원하는 함수를 넣을 수 있습니다.
- '저장'버튼을 클릭하여 저장하고, '테스트'버튼을 클릭하여 제어박스에 값을 보낼 수 있습니다.
- 설정 가져오기 버튼을 클릭하여 입력한 값이 지워져도 불러올 수 있습니다.