아이콘 및 작업 화면 설명
Make
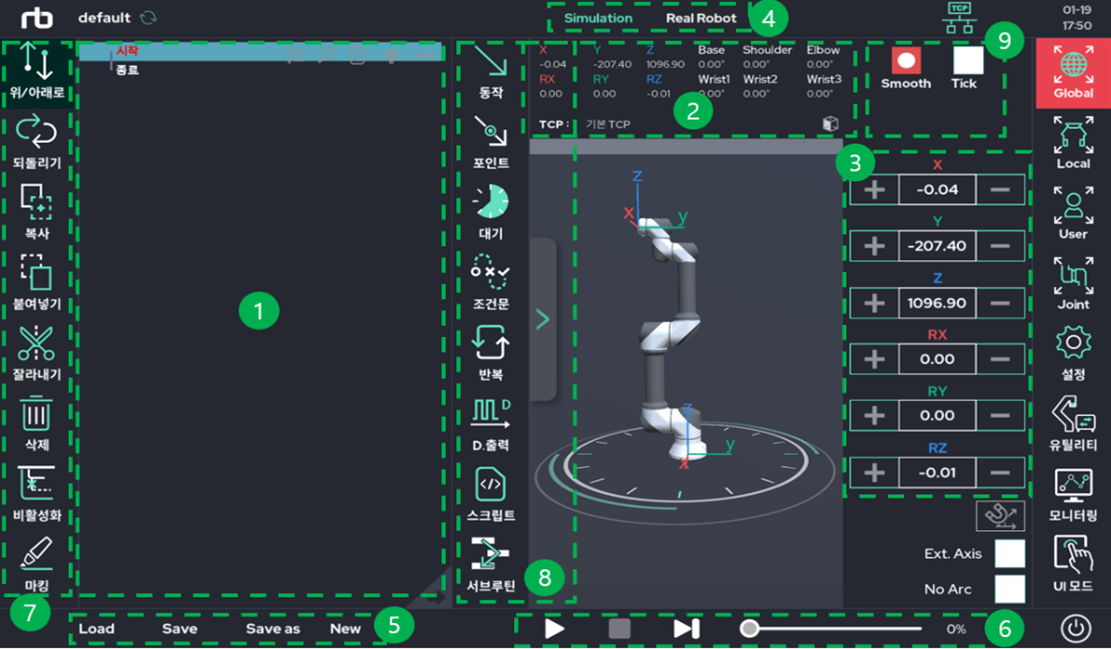
화면을 구성하고 있는 요소들을 설명합니다.
| 번호 | 설명 |
|---|---|
| ① | 프로그램 된 리스트를 트리형식으로 보여줍니다. |
| ② | 로봇 팔의 각 관절의 각도와TCP의 Cartesian(직교) 좌표 위치를 보여줍니다. |
| ③ | TCP 조그: Cartesian 좌표 위치를 변경할 수 있습니다. (베이스/툴/사용자 좌표계 선택 가능) Joint: 조그: 각 조인트의 각도를 변경할 수 있습니다. |
| ④ | Simulation 또는 Real 모드로 변환할 수 있는 버튼입니다. ※실제 로봇 팔을 구동하기 위해서는 Real모드를 선택하여야 합니다. |
| ⑤ | 저장된 프로젝트를 불러올 수 있고, 새로운 프로젝트를 생성할 수 있습니다. |
| ⑥ | 티칭된 프로그램을 실행 또는 멈출 수 있는 버튼이 있고, 속도조절 바가 존재합니다. |
| ⑦ | 복사/붙여넣기/주석 등 각종 편집 도구가 위치합니다. |
| ⑧ | 각종 프로그램 기능 (명령어/액션) 등이 배치되어 있습니다. 우측의 화살표를 클릭하면 더 많은 기능들이 포함되어 있습니다. |
| ⑨ | 조그의 모드를 Smooth 모드와 Tick 모드 중 선택하는 버튼입니다. |
TIP
- 티칭: 사용자가 원하는 대로 로봇 팔을 움직일 수 있도록 프로그램 하는 것을 뜻함.
- TCP(Tool Center Point): 공구중심점으로 주어진 응용에 대하여 기계접속 좌표계에 대해 정의된 점으로, 말단장치(end-effector)의 원점이 됩니다.


1. 티칭 아이콘(기능 아이콘, Make 화면)
| 아이콘 | 설명 |
|---|---|
| 티칭을 위한 로봇 팔의 이동방식을 설정할 수 있습니다. 지정된 목표 관절 각도로 각 관절을 움직이는 동작J, 지정된 목표 TCP 값으로 TCP를 선형적으로 움직이는 동작L이 있습니다. 이외에도 두 가지 기본 움직임을 응용할 수 있는 동작JB, 동작PB, 동작JL, 동작ITPL, 동작Pro 등 총 7개의 움직임이 내장되어 있습니다. | |
| 동작의 하위항목으로서 가고자 하는 목표 값을 넣을 수 있는 기능입니다. 동작J와 동작JB의 경우 목표 값으로 관절의 각도 값을 넣습니다. 동작L, 동작PB, 동작JL, 동작Pro 그리고 동작ITPL의 경우 목표 값으로 TCP의 직교 좌표 값(x, y, z, rx, ry, rz)을 넣습니다. | |
| 동작과는 별도로 원형 동작을 위한 기능을 제공합니다. 시작점과 두 점을 찍어서 3점을 지나는 호(arc)를 그리는 모드가 존재하고, 중심점과 회전축을 설정하여 원을 그릴 수 있는 모드가 있습니다. | |
| 특정 자세/위치 정보를 저장하고 변수화 하기 위한 핀포인트 기능입니다. 해당 위치로 움직이지 않습니다. 특정 자세의 위치/자세 값을 변수로 저장해 두었다가, 다른 모션 기능에서 참조 (호출)하여 사용 가능합니다. | |
| 특정 관절 각도 값을 저장하고 변수화 하기 위한 핀조인트 기능입니다. 해당 위치로 움직이지 않습니다. 관절 각도 값을 변수로 저장해 두었다가, 다른 모션 기능에서 참조 (호출)하여 사용 가능합니다. | |
| 프로그램의 시작 위치 또는 로봇의 관절 0점 위치로 로봇을 이동시키는 기능입니다. 이동 방식은 동작J, 동작L 중 선택 가능합니다. | |
| 지정된 조건이나 시간만큼 기다리는 기능입니다. 5가지 모드가 존재합니다. 지정된 시간만큼 기다리는 기능, 조건이 참일 동안 기다리는 기능, 조건이 참이면 기다림을 종료하는 기능, 입력조건이 참일동안 기다리는 기능, 그리고 입력조건이 참이면 기다림을 종료하는 기능이 있습니다. | |
| 작성된 프로그램 명령들을 하위항목으로 묶어 모듈로 관리할 수 있도록 도와주는 기능입니다. 폴더 기능마다 이름을 다르게 부여하여 관리를 도와주는 도구입니다. | |
| 프로그램 리스트 트리에 주석과 같이 필요한 부분에 간단한 메모를 할 수 있습니다. | |
| 프로그램을 종료하는 기능과 알람(alarm) 팝업 메시지를 띄울 수 있는 기능입니다. 4가지 옵션이 존재합니다. 프로그램을 종료할 수 있는 종료, 서브 프로그램만 종료할 수 있는 서브 프로그램 종료, 폴더 하위 프로그램만 종료할 수 있는 폴더 종료, 그리고 알람(alarm) 팝업 메시지를 띄울 수 있는 알람 기능이 있습니다. | |
| 내부 값 디버깅을 위한 Debug 기능입니다. 디버그 팝업과 사용자 로그 2가지 옵션이 있습니다. 디버그 팝업은 원하는 변수 값이나 내부 파라미터를 요청하면 팝업 형식으로 해당 값을 확인할 수 있습니다. 사용자 로그는 로그 시스템에 기록하고 싶은 문자열 또는 문자열 변수를 남길 수 있습니다. 사용자 로그를 너무 자주 저장할 시, 시스템에 영향을 줄 수 있습니다. | |
| 유저 입력 기능은 프로그램 실행 중 일시정지 하여 변수/배열/포인트/조인트/문자열/Global/ROM의 값을 사용자가 입력하여 변경 가능하도록 하는 기능입니다. 사용자의 상황에 따라 값을 변경할 수도, 무시하고 건너뛰는 것도 가능합니다. | |
| 로봇 이외에 부가축(추가적인 모터)를 제어하기 위한 기능입니다. 최대 6개까지 추가 가능합니다. | |
| If문입니다. 조건에 따라 로봇이 다른 명령을 수행할 수 있도록 분기를 설정할 수 있습니다. If/else if/else 문을 사용할 수 있습니다. | |
| Switch문입니다. 조건에 따라 로봇이 다른 명령을 수행할 수 있도록 분기를 설정할 수 있습니다. Switch/case 문을 이용할 수 있습니다. | |
| 하위의 내용을 최초 한번만 실행하는 Pre Program 기능과 프로그램 종료 후 마무리 작업으로 수행할 기능을 정의하는 Post Program 기능입니다. Pre Program기능은 Play 모드와 같이 프로그램이 계속 돌아가는 경우, Pre Program의 하위에 선언된 내용은 최초 한번만 실행됩니다. 변수 선언이나 통신 연결과 같이 단발성 명령어의 경우 Pre program 하위에서 관리하면 됩니다. Post Program의 하위에 선언된 기능들은 프로그램 종료 후 순차적으로 수행됩니다. 동작에 관한 명령어는 하위에서 사용하지 못합니다. | |
| Set 기능입니다. Setup 메뉴에서 세팅하는 각종 설정 파라미터를 프로그램 내부에서 별도로 세팅 가능합니다. 특정 설정 파라미터를 프로그램 실행 중에 변경할 수 있는 기능을 가지고 있습니다. | |
| TCP 설정 기능은 미리 저장한 TCP 값을 프로그램 실행 중에 불러와 한시적으로 TCP 값을 변경하는 기능입니다. Setup 페이지의 Tool List에서 TCP 값을 미리 저장할 수 있습니다. | |
| 수동 조작 기능은 프로그램이 실행되는 중에 일시정지하고 직접 교시를 사용할 수 있게 하는 기능입니다. | |
| 로봇 관절과 부가축을 동시에 동작 시키기 위한 기능입니다. | |
| 반복문입니다. 지정된 조건이나 횟수만큼 하위의 프로그램을 반복합니다. 4가지 모드가 존재합니다. 지정된 횟수만큼 반복 기능, 지정된 조건이 참일 동안 반복하는 기능, Do While(지정된 조건이 참일 동안 반복하지만, 조건이 참이 아니어도 최초 1회는 실행하는 기능) 그리고 조건이 참이면 반복을 끝내는 기능이 있습니다. | |
| 반복문을 강제로 종료하는 기능입니다. 반복문 (repeat 기능) 기능 하위에서 사용되며, 반복문에 특정 조건이 선언되어 있더라도 break 기능이 사용되면 선행적으로 반복문을 탈출합니다. 반복중단 외에도 프로그램 흐름이 반복문 최상단으로 이동하는 계속 기능, 프로그램 로직 점프 Here로 점프할 수 있는 프로그램 로직 점프 To기능, 프로그램 점프 To의 목적지가 되는 프로그램 로직 점프 Here, 그리고 폴더로 점프할 수 있는 프로그램 로직 점프 기능이 있습니다. | |
| 쓰레드 기능입니다. 일반/비정지 쓰레드 추가 기능과 이벤트 쓰레드 호출 2가지 기능이 있습니다. 쓰레드 속성은 5가지가 있습니다. 쓰레드 속성에는 일반 쓰레드, 비정지 쓰레드, 비정지 쓰레드2, 이벤트 일반 쓰레드 그리고, 이벤트 비정지 쓰레드가 있습니다. 쓰레드 기능의 하위 항목은 메인 프로그램과 병렬로 실행됩니다. 단, 로봇 동작에 관한 명령어는 쓰레드 하위에 넣지 못합니다. | |
| G코드 기능은 지정된 폴더에 G코드 파일을 위치시킨 경우 사용할 수 있는 기능입니다. 해당 G코드의 경로를 로봇이 구현하게 됩니다. | |
| 모션 레코딩 기능을 통하여 녹화된 모션을 다시 재생하는 기능입니다. 직접 교시 등을 통하여 녹화된 모션은 이 기능을 통하여 J나 L타입으로 다시 재생 가능합니다. | |
| 아날로그 입력 신호를 통해 용접 전류로부터 피드백을 받아 TCP 위치를 조정하는 기능입니다. 사용자는 Rainbow에서 제공하는 아날로그 입력 범위(0~10V)에 따라 측정/제어할 전류/전압 신호의 크기를 조정해야 합니다. | |
| 미리 정해져 있는 동작을 자동으로 만들어주는 기능입니다. 정해져 있는 동작은 여러 개가 있으며, 해당 동작에 대해 파라미터를 수정함으로써 원하는 동작의 생성이 가능합니다. | |
| 컨트롤 박스의 디지털 출력(Digital output)을 제어하는 명령어입니다. 7가지 기능이 있습니다. 개별 출력, 비트 조합 출력, 신호 토글 출력, 전체신호 출력, 단위 펄스 출력, 펄스 폭 변조(PWM), 그리고 조건 기반 출력 기능이 있습니다. 16개의 포트 중 선택된 포트를 통해 선택된 신호가 출력되는 기능입니다. 각 포트에는 High 신호, Low 신호, Bypass 3가지를 설정할 수 있습니다. | |
| 컨트롤 박스의 아날로그 출력(Analog output)을 제어하는 명령어입니다. 4개의 아날로그 포트 중 선택된 포트를 통해 선택된 전압을 출력하는 기능입니다. 각 포트는 0~10 V의 전압 범주로 출력할 수 있습니다. 개별 아날로그 출력과 속도기반 아날로그 출력 2가지 기능이 있습니다. | |
| 툴 플랜지에는 2개의 디지털 출력이 있습니다. 2개의 디지털 출력의 신호를 지정할 수 있습니다. 더불어, 툴 플랜지에서 출력할 전압의 레벨 (0V 또는 12V 또는 24V)을 함께 조절 가능합니다. | |
| 그리퍼 기능입니다. 타사에서 만든 그리퍼 사용에 대한 함수가 미리 내장되어 있습니다. 사용하고자 하는 그리퍼를 선택하고, 해당 그리퍼가 제공하는 기능을 선택하면 자동으로 손쉽게 그리퍼를 사용할 수 있도록 보조하는 기능입니다. | |
| I/O 확장 모듈을 추가하였을 때 사용 가능한 기능입니다. I/O 확장 모듈의 디지털/아날로그 출력을 설정할 수 있으며 설정 방식은 기존의 D.출력, An.출력과 동일합니다. | |
| 아크 용접을 위한 전용 매크로 기능입니다. 일반적인 D.out이나 Wait 기능등을 통해 구현 가능한 기능을 매크로 형태로 빠르게 사용 가능하도록 묶어둔 전용 기능입니다. 아크 용접기에 관한 설정은 Setup > Device에서 수행합니다. | |
| 디지털 용접기를 사용하기 위한 기능입니다. 사용하고자 하는 브랜드의 디지털 용접기를 선택한 후 모드, 옵션을 선택하면 디지털 용접기를 쉽게 사용할 수 있습니다. | |
| 사용자가 임의의 스크립트를 작성할 수 있는 스크립트 기능입니다. 기능과 별도로 특정 연산/계산이 필요하거나, 변수 치환, 대입 등의 기능을 스크립트 기능을 사용하여 구현 가능합니다. | |
| 변수 선언을 위한 Assign 기능입니다. 변수 형태는 5타입으로 선언할 수 있습니다. 단일 숫자를 저장하는 variable 타입, 배열 숫자를 저장하는 array 타입, 자세 정보(x, y, z, rx, ry, rz)를 저장하는 point 타입, 관절 각도 정보를 저장하는 joint, 그리고 문자열을 저장하는 string 타입이 있습니다. | |
| 프로그램 구동 중, 실시간으로 관찰하고 싶은 변수 (단일 변수, 배열, 포인트 변수 등)를 선언하는 기능입니다. 모니터링 기능에 선언된 변수들은 Make/Play 페이지 우측의 모니터 아이콘을 클릭하면 프로그램 구동 중 실시간으로 변수 값을 관찰 가능합니다. | |
| 툴 플랜지/컨트롤 박스를 통해, RS485/232 출력을 위한 기능입니다. 아스키(Ascii)모드로 출력을 줄 수도 있고, 16진법(hex) 모드로 출력을 줄 수도 있습니다. 해당 통신 규약은 Setup-serial 메뉴에서 설정합니다. | |
| 소켓 통신을 위한 기능입니다. 소켓을 열어서 특정 서버에 접속하고, 서버에 요청 메시지를 보내고 서버로부터 특정 데이터를 받아오는 기능을 제공합니다. 소켓 통신은 최대 5개까지 별도의 서버와 연결 가능합니다. | |
| 모드버스 클라이언트 기능입니다. 특정 IP/주소에 데이터를 요청하고, 반환된 데이터를 가져올 수 있는 기능을 제공합니다. 데이터 요청 주기와 형식 등을 지정 가능합니다. 본 제품에서 제공되는 모드버스 서버에 관련된 프로토콜은 별도로 제공됩니다. | |
| HMI, PLC 등의 타제품을 쉽게 사용할 수 있도록 기능을 내장한 기능입니다. 사용하고자 하는 제품을 선택 가능하고 선택한 제품을 사용하기 위한 세부 기능을 선택할 수 있습니다. | |
| 사전에 만들어진 다른 프로그램 파일(티칭 파일)을 현재 프로젝트안에 삽입할 수 있는 기능입니다. 하위 프로그램 호출, 명령어 내용 복사, 그리고 프로그램 전환 방식으로 호출 기능이 존재합니다. 하위 프로그램 호출 기능은 하위 프로젝트를 시각적으로 내용을 볼 수는 있으나, 수정은 불가능합니다. 수정이 필요한 경우 해당 프로젝트를 별도로 열어야 합니다. 명령어 내용 복사 기능은 사전에 만들어진 다른 프로그램 파일(티칭 파일)을 현재 문서에 수정 가능한 형태로 삽입하는 기능입니다. 하위 프로그램 호출의 기능과 유사하지만, 하위 프로그램 호출의 경우 단순히 해당 프로그램을 호출하는 기능이라면 명령어 내용 복사 기능은 현재 프로그램에서 수정 가능한 형태로 다른 프로그램을 복사해서 들고 오는 기능입니다. 프로그램 전환 방식으로 호출 기능은 메인 프로그램을 다른 프로젝트로 바꾸고자 할때 사용하는 기능입니다. | |
| 반복 동작을 정의하는 기능입니다. 반복 동작을 수행할 공간에 대한 정보를 정의하고, 각 위치에서 수행할 반복 동작을 정의하면 모든 공간 지점에서 같은 동작을 수행합니다. 팔레타이징을 이 기능을 통하여 구현 가능합니다. | |
| 컨베이어 추적 기능입니다. 컨베이어 속도와 방향에 관한 설정을 하면, 컨베이어 기능의 하위 동작(동작 L, 동작 PB, 동작 ITPL, 동작 Pro, Circle)은 컨베이어 흐름에 더해집니다. | |
| 힘 제어를 위한 기능입니다. 원하는 힘의 작용 방향과 좌표계를 선택합니다. 힘 제어 하위에 포함된 동작들은 힘 제어 기능이 자동으로 부여됩니다. | |
| 위빙 동작을 위한 전용 기능입니다. 위빙 동작 하위에 설정된 동작 L계열이나 Circle 등의 동작은 설정된 위빙 옵션이 합쳐져서 동작됩니다. 위빙 형상은 Trapezoidal, SineWave, Triangle, C-Wave, 그리고 Circle 5가지가 있습니다. | |
| 위빙 동작을 위한 전용 기능입니다. 기존 위빙 동작과 달리 위빙의 기준이 TCP 좌표계를 통해 이루어집니다. 위빙 동작 하위에 설정된 동작L계열이나 Circle 등의 동작은 설정된 위빙 옵션이 합쳐져서 동작됩니다. 위빙 형상은 Trapezoidal, SineWave, Triangle, C-Wave, 그리고 Circle 5가지가 있습니다. | |
| 용접 어플리케이션에 사용하기 위한 기능입니다. 모재의 이동을 감지하여 이동 및 이동 방향을 반영해 용접을 진행할 수 있도록 해줍니다. |
2. 편집 아이콘 (Make 화면 좌측)
| 아이콘 | 설명 |
|---|---|
| 명령어를 한 칸씩 위로 올리거나 밑으로 내릴 수 있습니다. | |
| 작업을 한 단계 이전, 이후로 되돌립니다. 최대 50회까지 가능합니다. | |
| 선택된 명령어를 복사합니다. 복사한 명령어는 다른 위치에 붙여 넣을 수 있습니다. | |
| 복사 또는 잘라낸 명령어를 선택한 위치에 붙여 넣습니다. | |
| 선택된 명령어를 잘라냅니다. 잘라낸 명령어는 다른 위치에 붙여 넣을 수 있습니다. | |
| 선택된 명령어를 삭제합니다. | |
| 주석화 (억제) 기능입니다. 선택된 명령어를 실행하지 않도록 만듭니다. 주석화가 된 명령어는 프로그램에 존재하지만 실행되지 않습니다. 주석화가 된 명령어에 비활성화 버튼을 한번 더 누르게 되면, 활성화 상태가 됩니다. | |
| 원하는 프로그램 라인에 하이라이트 (마킹)을 표시할 수 있습니다. 중요한 프로그램 라인에 밑줄을 그리는 기능입니다. 색상은 파란색, 분홍색 2가지가 있습니다. |
3. 로봇 팔 움직임 및 기타 기능 (Make 화면 우측)
| 아이콘 | 설명 |
|---|---|
| 베이스에 고정된 Global 좌표계를 기준으로 TCP의 위치를 움직일 수 있습니다. | |
| TCP에 고정된 Local 좌표계 (툴 좌표계)를 기준으로 TCP의 위치를 움직일 수 있습니다. | |
| 사용자 정의 좌표계 (User Coordinate)를 기준으로 TCP의 위치를 움직일 수 있습니다. | |
| 로봇 팔의 각 관절을 따로 움직일 수 있습니다. | |
| 유저 좌표계 설정, 자동 TCP 찾기 기능 등, 조그와 함께 사용하면 편리한 설정을 별도로 모아 두었습니다. 해당 설정들은 기본적으로 Setup 메뉴에서도 설정 가능합니다. | |
| 자주 사용하는 특수 기능들이 모여 있습니다. 시스템의 입출력 상태 정보, 유저 좌표계 (user-coordinate) 설정 정보, 로봇의 전류/온도 정보 등 기타 상태 및 설정값을 볼 수 있습니다. | |
| Monitor 기능을 통해 선택된 변수들의 값을 실시간으로 관찰하는 창입니다. 선택된 변수뿐만 아니라, 자주 확인해야 되는 시스템 변수도 함께 표시됩니다. | |
| UI 모드를 선택할 수 있는 기능입니다. 사용자의 수준, 환경에 맞게 UI 모드를 선택할 수 있습니다. 모드 옵션은 전문가 모드, 초보자 모드, 용접 모드(아날로그), 용접 모드(디지털) 4가지가 있습니다. |
4. 시스템 기능 버튼
| 아이콘 | 설명 |
|---|---|
| 홈 화면 및 다른 페이지로 이동하는 버튼입니다. (좌측 상단에 배치되어 있음). | |
| UI가 종료됩니다. 만약 로봇이 활성화되어 있고, UI 태블릿 PC와 연결이 되어 있는 경우, 로봇의 전원도 함께 내려갑니다. 스크린 락(lock) 기능이 있습니다. (우측 하단에 배치되어 있음). |
TIP
- 각 기능에 대한 자세한 설명은 뒷부분에 설명되어 있습니다.