범용 아날로그 I/O구성
높은 신뢰성을 위하여 다음과 같은 방법을 권장합니다.
- I/O에 가장 가까운 아날로그 GND를 사용합니다.
- 장비 및 로봇 컨트롤 박스는 동일한 GND를 사용합니다. 아날로그 I/O는 로봇 컨트롤 박스에서 절연되지 않습니다.
- 쉴드 또는 트위스트 페어 처리된 케이블을 사용합니다. Power(J12) 터미널의 GND 쉴드에 연결합니다.
| 터미널 | 매개변수 | 최소 | 형식 | 최대 | 단위 |
|---|---|---|---|---|---|
| 전압모드 입력 | |||||
| AIx - AG | 전압 | 0 | - | 10 | V |
| AIx - AG | 분해능 | - | 16 | - | 비트 |
| 전압모드 출력 | |||||
| AOx – AG | 전압 | 0 | - | 10 | V |
| AOx – AG | 분해능 | - | 16 | - | 비트 |
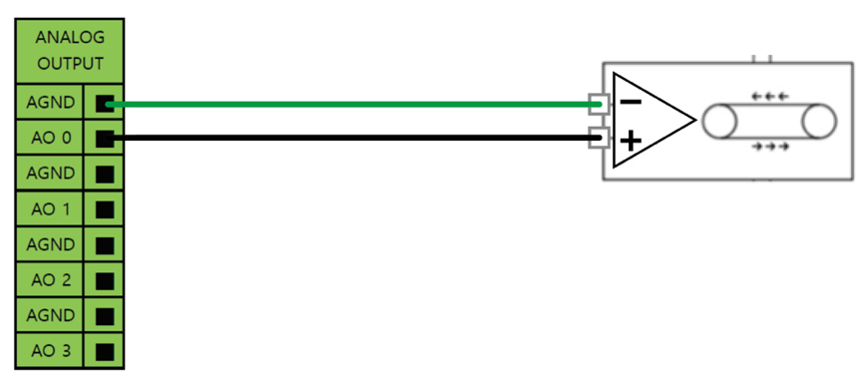
1. 아날로그 출력
아날로그 출력을 컨베이어 벨트의 속도 컨트롤 입력으로 사용할 수 있습니다. 구성 방법은 다음과 같습니다.
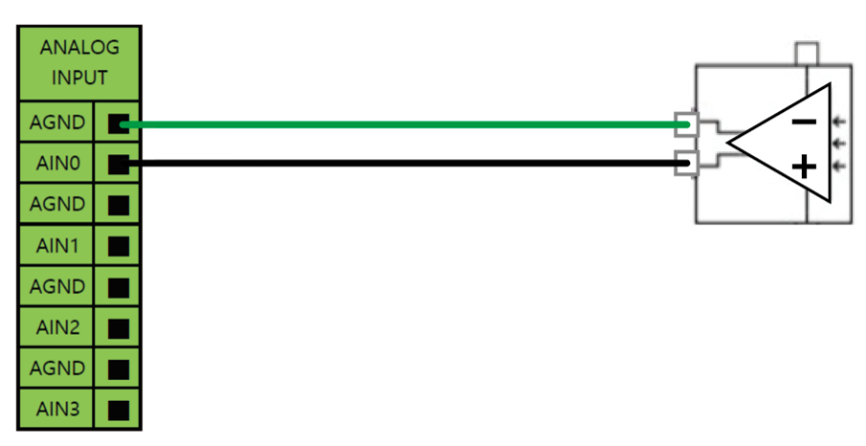
2. 아날로그 입력
아날로그 센서의 출력 값을 아날로그 입력으로 사용할 수 있습니다. 구성 방법은 다음과 같습니다.
3. LCD 상태 표시창 설명
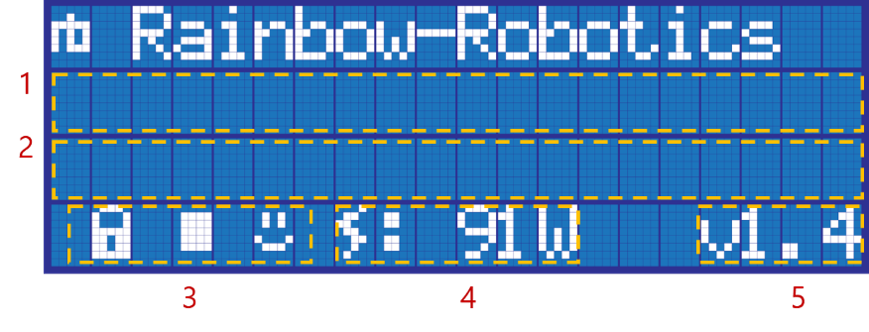
- 알림 박스(1): 시스템 상태에 관한 알림 박스입니다.
- Please Wait: 컨트롤 박스 내부 PC가 준비가 되지 않았음을 나타냅니다.
- default: 컨트롤 박스 내부 PC가 준비가 끝났음을 나타냅니다.
- Please Wait: 컨트롤 박스 내부 PC가 준비가 되지 않았음을 나타냅니다.
- 알림 박스(2): 로봇 동작 및 상태에 관한 알림 박스입니다.
- 동작 아이콘: 브레이크 잠김(
 ) 또는 해제(
) 또는 해제( ) 상태, 재생(
) 상태, 재생( ) 또는 정지(
) 또는 정지( ) 상태, 충돌(
) 상태, 충돌( ) 또는 안전(
) 또는 안전( ) 상태를 나타냅니다.
) 상태를 나타냅니다. - 전력 사용량: 와트(W) 단위의 총 전력 사용량을 나타냅니다.
- 시스템 버전 정보: 시스템 버전 정보입니다.