Set-up (Inbox/Frame)
1. Inbox
Inbox 기능 사용을 위해 Inbox의 크기와 위치 정보를 세팅합니다.
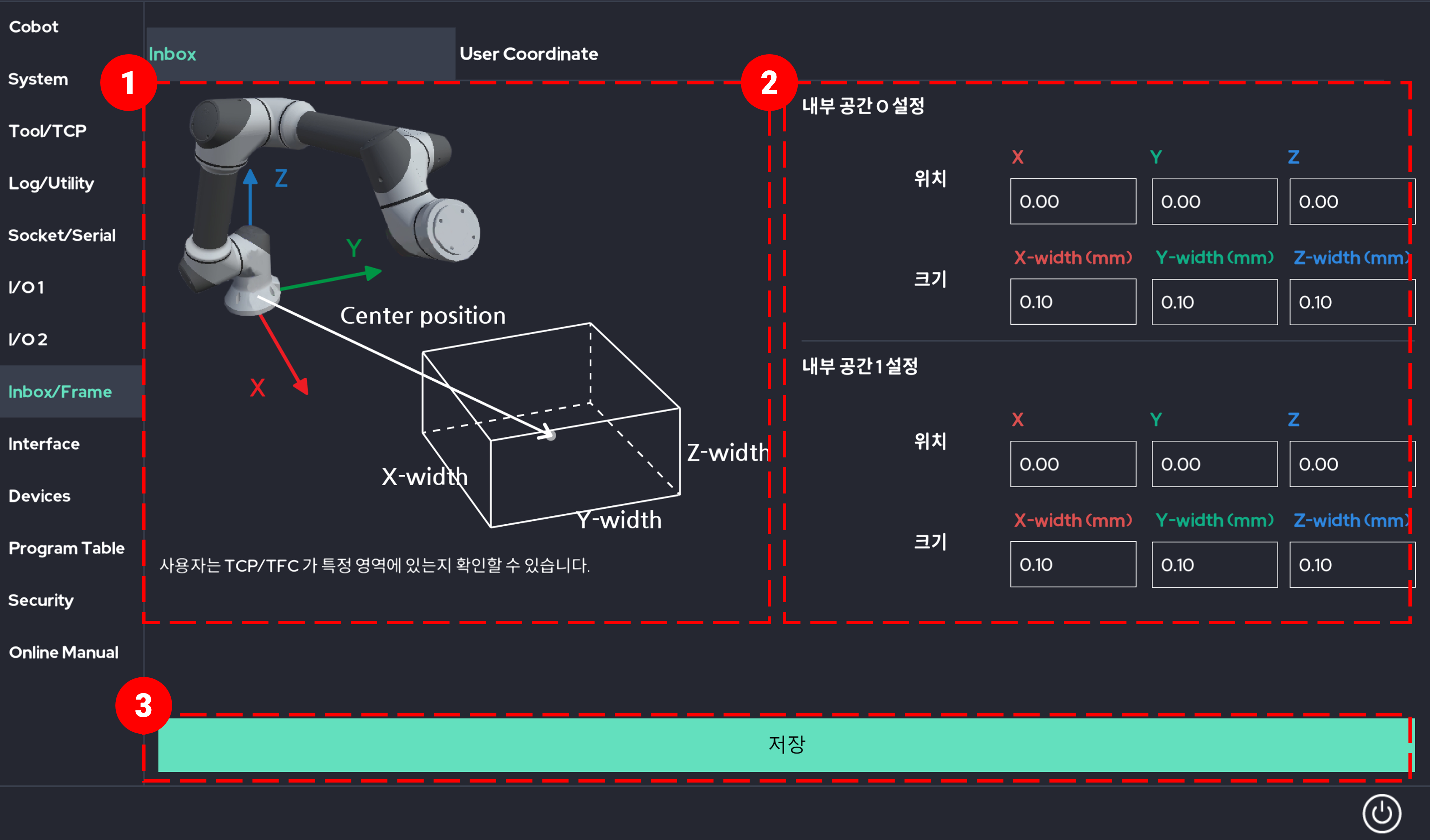
- Inbox의 위치 정보를 나타냅니다. 로봇 팔 베이스의 기준 좌표계를 원점으로 하여 Inbox의 위치 정보를 입력합니다.
- Inbox 0번과 1번의 중심점 위치 및 너비를 입력한다. 이때 Inbox의 Orientation은 설정할 수 없습니다.
설정의 기준 좌표계는 제조사 베이스 좌표계 입니다. - 변경된 세팅을 저장합니다.
2. User Coordinate
사용자 정의 좌표계 (User-Coordinate)를 설정합니다.
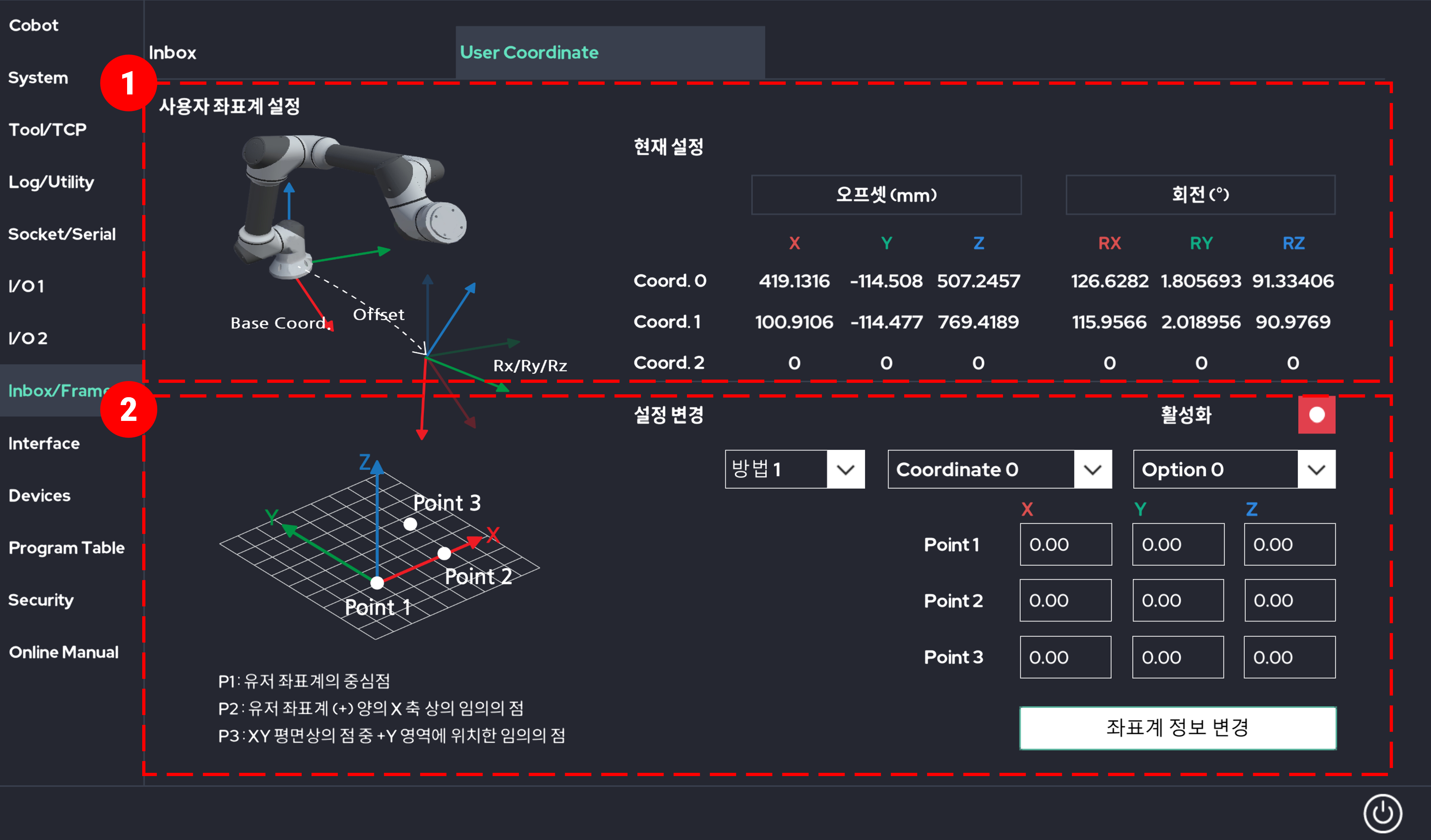
- 현재 세팅 된 사용자 정의 좌표계 정보입니다. 표시된 정보는 제조사 로봇 베이스 좌표계를 기준으로 합니다.
- 사용자 좌표계를 설정하는 방법은 2가지 입니다.
- 방법 1
사용자 정의 좌표계의 설정을 변경합니다. 사용자 좌표계는 총 3개를 설정할 수 있습니다.
각 좌표는 로봇 팔 베이스의 기준 좌표계를 원점으로 하여 정합니다.
3점 설정을 통해 좌표계를 설정합니다.
- Point 1(P1)은 사용자 좌표계의 원점입니다.
- Point 2(P2)는 사용자 좌표계의 X축 위의 임의의 한 점입니다. P2는 가급적 P1과 멀리 설정하는 것이 좋습니다.
- Point 3(P3)는 사용자 좌표계의 XY 평면 위의 임의의 한 점입니다. Point 3의 설정으로 Z축의 방향을 정할 수 있습니다.
- 방법 2
해당 기능은 사용자 좌표계의 값을 직접 입력할 수 있는 기능입니다.
즉, 사용자 좌표계를 티칭 하지 않고 원하는 값을 직접 지정하여 적용할 수 있습니다.