동작 모드
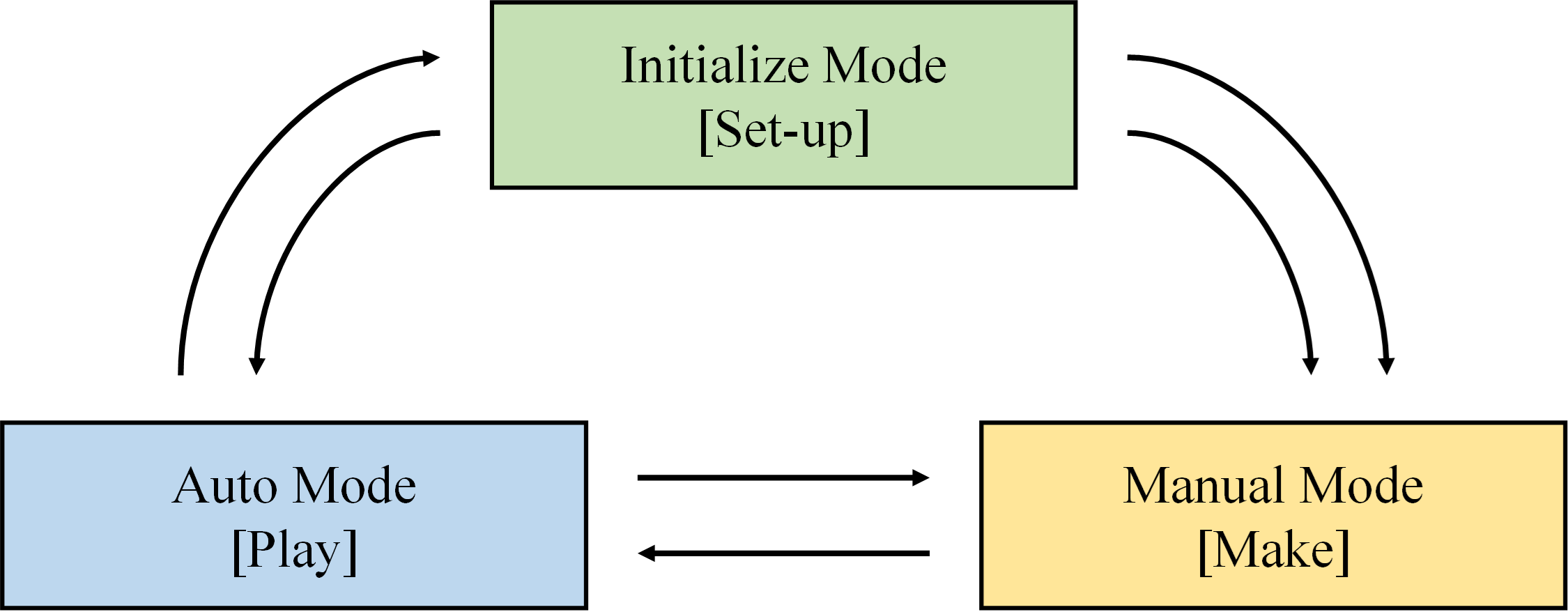
협동로봇 RB Series의 동작 모드는 아래와 같이 구성되어 있습니다.
자동 모드 진입 시 비밀번호를 통해 접근해야 합니다.
주의
- 출고 시 자동모드 진입 비밀번호는 설정되어 있지 않습니다. 다른 누군가가 접근하지 않도록 비밀번호를 설정하고 사용해야 합니다.
- Auto Mode에 진입 전 사용자는 주변에 위험 상황을 제거하고 비상정지 스위치와 보호정지 장치의 상태를 확인해야 합니다.
- 어떠한 경우에도 사용자는 로봇 동작 전에 로봇의 설치 상태를 올바르게 파악하여 설정 완료를 하여야 합니다.
Initialize Mode (Set-up)
로봇 동작 전에 주변 장치 설정이나 로봇의 상태를 설정할 수 있습니다.
작업 공간, TCP 오프셋, 가반하중 등 로봇 동작에 있어 전반적인 설정을 진행할 수 있습니다.
이때 모터에는 전원이 공급되어 있지 않으며, 활성화 작업을 통해서 모터에 전원을 공급할 수 있습니다.Auto Mode (Play)
로봇이 사용자의 간섭 없이 미리 정의된 작업만 수행하는 상태입니다. 이때 모터에는 전원이 공급되어 있습니다.
Simulation 기능을 통해 프로그래밍 된 로봇의 동작을 시뮬레이션을 통해 검증할 수 있으며, Real 상태로 변환하여 검증된 프로그램으로 로봇을 구동 할 수 있습니다.
이때 로봇은 사전에 설정된 안전 기능이 수행되고 있으며, 사용자는 Play 창을 통해 로봇, 주변 기기의 상태를 모니터링 할 수 있습니다.Manual Mode (Make)
로봇이 사용자의 직접적인 행위를 통해 동작하는 상태입니다. 이때 모터에는 전원이 공급되어 있습니다.
직접 교시, 프로그램 생성 및 수정, 주변 기기 수동 동작 등을 수행할 수 있으며, 안전 속도 슬라이드 바를 통해 사용자가 PC태블릿을 조작하는 순간에만 로봇이 동작할 수 있습니다.
안전 슬라이드에서 손을 떼면 로봇의 동작은 즉시 정지하도록 되어 있습니다.
주의
- 직접 교시의 경우에 안전 슬라이드 기능을 설정한 상태로 사용해야 합니다.
- 초기 출고 시 안전 슬라이드 기능은 비활성화 되어 있습니다.
- 추가적으로 3위치 활성화 스위치를 사용 시에 ISO 10218-1의 5.8.3을 준수하여 사용해야 합니다.