운용 유틸리티
Make 화면 우측에는 조그(Jog) 기능 이외에 시스템 운용을 위한 기타 유틸리티 기능들이 있습니다.
- 설정 : Setup에서 설정하는 내용 중, 조그와 함께 사용하면 편리한 몇몇 설정 기능이 있습니다.
- 유틸리티 : 자주 사용하는 자세 저장 기능, 시스템 입/출력 정보 보기 기능, 시스템 출력 테스트 기능 등, 주요 편의 기능들이 모여 있습니다.
- 모니터링 : 실시간 변수 모니터링 창 및 시스템 변수 모니터링 기능을 제공합니다.
- UI 모드 : 사용자의 수준, 사용자의 목적에 따라 UI 모드를 선택할 수 있습니다.
Utility 하위 기능
1. 자세
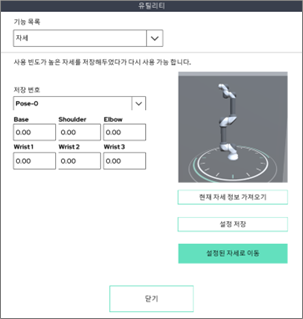
자주 사용하는 자세를 최대 20개까지 UI 태블릿에 저장해 놓고 사용 가능합니다.
‘현재 자세 정보 가져오기’ 버튼을 눌러서 현재 자세 정보를 가져오고, Set 버튼을 눌러서 저장합니다.
‘설정된 자세로 이동’ 버튼을 계속 누르고 있으면 저장된 자세로 이동합니다.
2. 관절을 원점으로 이동
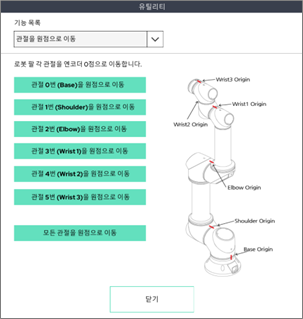
각 관절을 로봇 팔에 표시된 기구적 원점으로 이동시킵니다.
3. 회전구속 직접 교시

해당 모드는 Real Robot모드에서만 사용 가능합니다.
민감도가 낮게 설정된 축은 직접 교시 모드에서 구동되지 않으며, 민감도가 높게 설정된 축에 한하여 직접 교시 모드에서 구동됩니다.
4. 입력 신호 뷰어

컨트롤 박스와 툴 플랜지의 입력 신호 모니터링 창입니다.
5. 출력 신호 뷰어
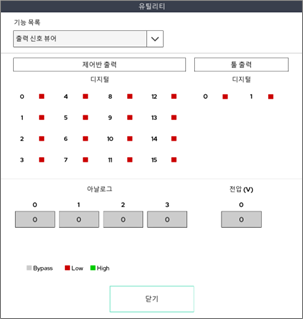
컨트롤 박스와 툴 플랜지의 출력 신호 모니터링 창입니다.
6. 관절 정보
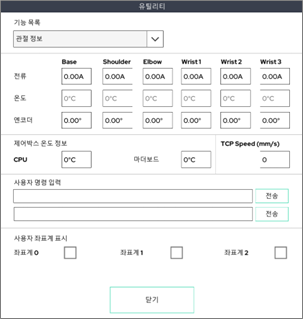
로봇 팔의 온도 전류 모니터링 및 유저 좌표계 시각화 설정 창입니다.
7. 직접교시 스냅기능
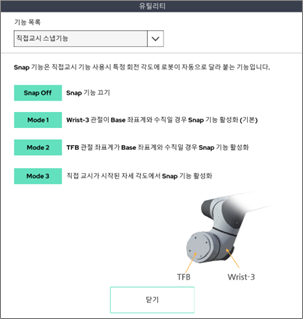
직접 교시 모드 사용시 적용될 스냅(snap) 모드 선택 창입니다.
8. 제어박스 출력 테스트

컨트롤 박스의 출력을 테스트할 수 있는 창입니다.
9. 툴 플랜지 출력 테스트

툴 플랜지의 출력을 테스트할 수 있는 창입니다.
10. I/O 확장 보드

I/O 확장 모듈의 입출력 신호 모니터링 창입니다.

I/O 확장 모듈의 출력을 테스트할 수 있는 창입니다.
Setting 하위 기능
1. 툴 List 선택
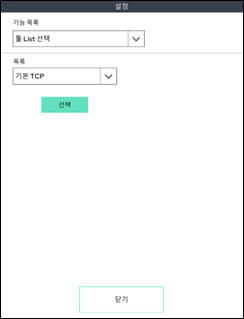
미리 저장한 TCP 목록에서 사용할 TCP를 설정하는 툴 List 선택 기능이 있습니다. 툴 리스트는 총 4개까지 설정 가능합니다.
2. 조이스틱 사용

유/무선 조이스틱을 활용하여 로봇을 티칭 시, 조이스틱 연결 설정 기능이 있습니다.
조이스틱은 아래 호환 가능 모델이 기입되어 있고, 초기설정을 해야 합니다.
모든 설정이 완료되면, 우측 상단의 새로 고침 표시의 버튼을 누르면 연결이 됩니다.
3. 사용자 좌표계

사용자 정의 좌표계를 세팅합니다. 활성화 버튼을 누르면 세 점을 선택하는 화면이 나옵니다.
3점 설정 모드입니다(7.7 Setup-Coordinate 참고).
4. 사용자 좌표계 중심점
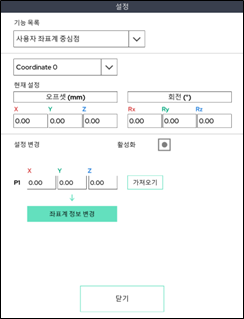
기존에 설정한 사용자 좌표계의 XYZ축과 회전방향은 유지하고 원점만 이동시킵니다.
5. 자동 TCP 설정
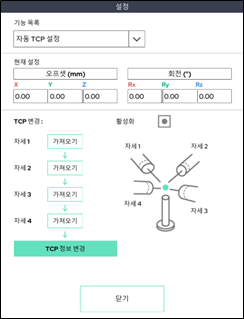
자동으로 로봇 말단(TCP)의 위치를 찾아주는 기능입니다.
설정하고자 하는 TCP 포인트를 3차원 공간상에 같은 지점으로 유지하는 4개의 다른 자세를 입력하면 자동으로 TCP 위치 값을 계산합니다.
그림과 같이 각 자세를 취하고, 해당 번호에 있는 ‘가져오기’ 를 누릅니다.
6. 고정밀 자동 TCP 설정
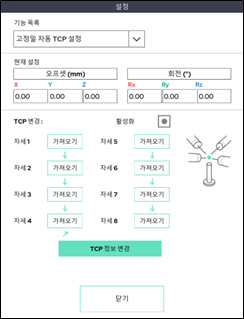
자동으로 로봇 말단(TCP)과 마찬가지로 말단의 위치를 찾아주는 기능입니다. 하지만 자세가 더 많아 더욱 정밀한 TCP를 찾습니다.
7. 외부 F/T 센서

외부 F/T 센서 (예: Robotiq F/T센서) 값을 확인하고 캘리브레이션 할 수 있는 창입니다.
8. 자동 부하 / 무게 설정

내부 / 외부 F/T센서를 사용해서 툴에 부착된 무게와 무게 중심을 찾아주는 기능입니다.
9. 직접교시 동작 녹화
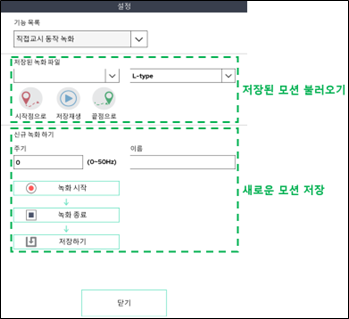
직접 교시 (중력 보상) 기능을 통해 동작을 녹화하는 기능입니다. 이 기능을 통해서 녹화된 동작은 Replay 기능을 통해서 프로그램에서 사용 가능합니다.
10. I/O 로깅


하나의 디지털 입출력을 정해 그 입출력의 값의 변화를 기록하고 이를 그래프로 보여주는 기능입니다.
11. 용접기 와이어 조작
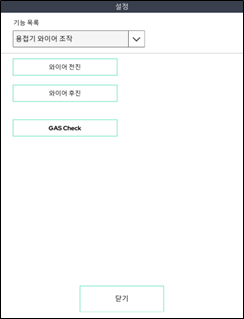
용접기의 와이어를 제어할 수 있는 기능입니다.
12. TCP 회전 설정(프레임)
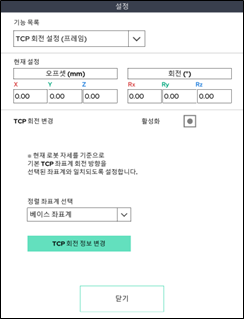
선택한 좌표계와 일치하도록 현재 로봇 자세를 기반으로 기본 TCP 좌표계의 회전 방향을 설정합니다.
13. 사용자 좌표계 자동 정렬

로봇의 현재 TCP 좌표계를 사용자 좌표계로 설정합니다.
14. 부가축 캘리브레이션
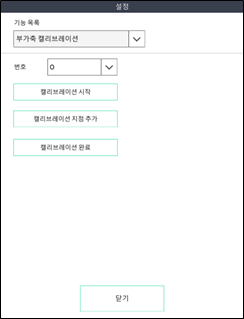
로봇 팔에 부가축의 회전축 및 회전 반경을 알려주기 위한 과정입니다. 해당 캘리브레이션을 진행함으로써 로봇과 부가축의 동기 제어가 가능해집니다.
15. 안전 Plane

안전을 위해 로봇 팔이 넘어가지 못하는 평면을 설정합니다. 설정된 면을 넘어가는 경우 로봇 팔이 정지됩니다.
16. 안전 관절 범위
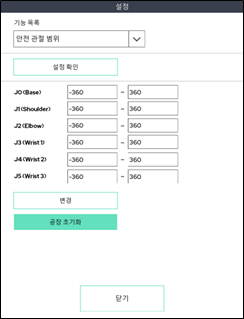
로봇 팔의 각 관절마다 동작하는 각도의 범위를 지정할 수 있습니다. 지정한 관절 각도 값 이상의 각도는 동작하지 않습니다.
17. 글로벌 핀포인트
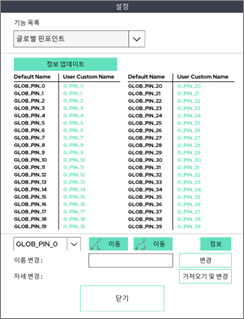
글로벌 핀포인트를 설정하는 기능입니다. 위 그림과 같이 글로벌 핀포인트를 설정하여 복수의 프로그램에서 해당 변수를 공유할 수 있습니다.
18. 회전 정렬
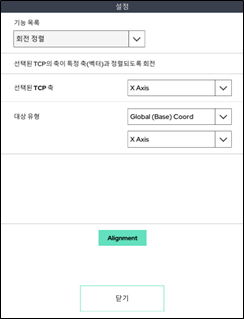
로봇 팔의 선택된 TCP의 축이 특정 축과 정렬 되도록 회전 시킵니다.
19. 최신 시스템 로그 확인

시스템 상에서 최신 로그 파일의 10줄에 대한 내용을 UI 상에 표시합니다.
20. 관절 0점 현장 캘리브레이션
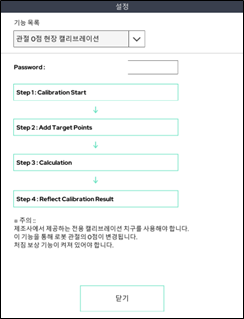
해당 기능은 관절 0점에 대한 캘리브레이션을 현장에서 진행하기 위한 기능입니다. 자세한 사항은 제조사에 문의 부탁드립니다.
모니터링 기능

6단원의 Monitor 명령어와 함께 사용하는 기능으로써, 시스템 기본 변수 및 사용자가 설정한 변수들의 값을 실시간으로 관찰할 수 있는 창입니다.
우측 상단의 녹화 기능을 켜면, 3차원 뷰어에서 로봇 툴의 TCP 궤적이 3차원 뷰어에 녹화가 됩니다 (노란 실선).
녹화 시간은 최대 30초입니다.

3D View 기능

사용 빈도가 높은 3차원 시야 각도가 지정되어 있습니다. 3차원 뷰어의 시각을 빠르게 바꾸고 싶은 경우 사용 가능합니다.