Set-up (Log/Utility)
1. Log
로봇 팔의 시스템 로그 상태를 확인할 수 있습니다.
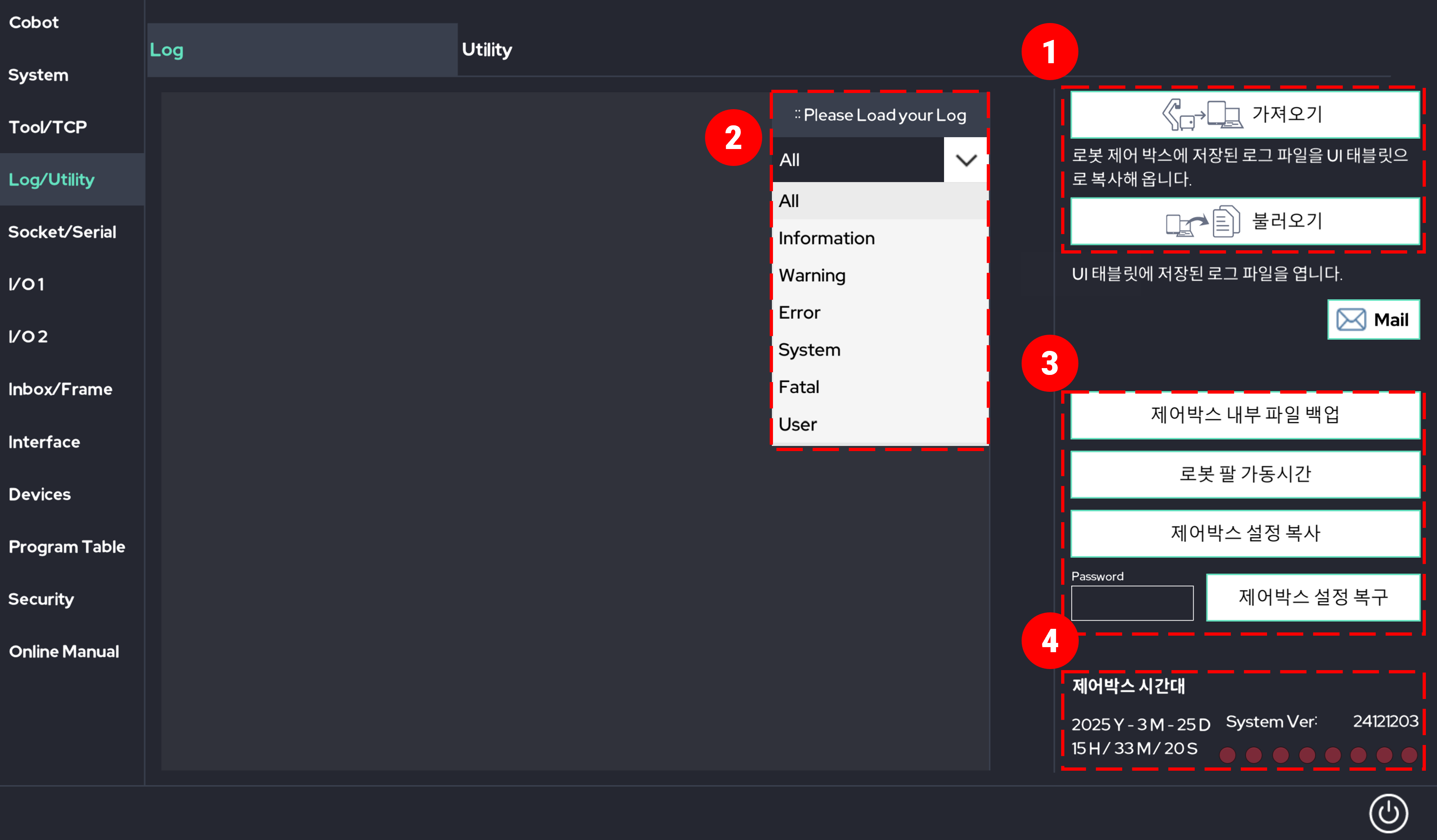
- 가져오기 : 제어박스에 있는 LOG 파일을 태블릿 PC로 가져옵니다.
- 불러오기 : 제어박스로부터 태블릿 PC로 가져온 LOG 파일을 불러와 출력합니다.
- 가져오기 : 제어박스에 있는 LOG 파일을 태블릿 PC로 가져옵니다.
- All : 모든 로그를 출력합니다.
- Infomation : 로그 중 정보에 관련한 내용만 출력합니다.
- Warning : 로그 중 경고에 관련한 내용만 출력합니다.
- Error : 로그 중 오류에 관련한 내용만 출력합니다.
- System : 로그 중 시스템에 관련한 내용만 출력합니다.
- Fatal : 로그 중 로봇에 고장과 직접적인 관련이 있는 오류에 관련한 내용만 출력합니다.
- User : 로그 중 사용자가 지정한 LOG에 관련한 내용만 출력합니다.
- Mail : 로그를 Rainbow Robotics의 고객지원 메일 계정으로 보냅니다. 이때 와이파이가 연결되어 있어야 합니다.
- All : 모든 로그를 출력합니다.
- 제어박스 내부 파일 백업 : 제어박스에 저장된 파일들을 태블릿 PC로 백업합니다.
- 로봇 팔 가동시간 : 로봇 팔을 운용한 시간을 출력합니다.
- 제어박스 설정 복사 : 제어박스의 설정을 복사합니다.
- 제어박스 설정 복구 : 기존 제어박스의 설정을 복구합니다.
- 제어박스 내부 파일 백업 : 제어박스에 저장된 파일들을 태블릿 PC로 백업합니다.
- 제어박스 시간대 : 현재 제어박스가 인식하고 있는 시간대를 표현합니다.
- System Ver. : 현재 제어박스가 사용하고 있는 UI 버전을 출력합니다.
- 제어박스 시간대 : 현재 제어박스가 인식하고 있는 시간대를 표현합니다.
2. Utility
로봇의 포장 및 비상 복구에 관한 기능을 제공합니다.
주의
- 비상 관절 복구 기능(Emergency Joint Recovery) 모드 사용 전, 본 기능의 특성과 작동법을 정확히 숙지 후 사용하세요.
- 로봇 운반 / 이송 시 제조사에서 제공한 포장 박스에 포장 자세로 넣어야 합니다.
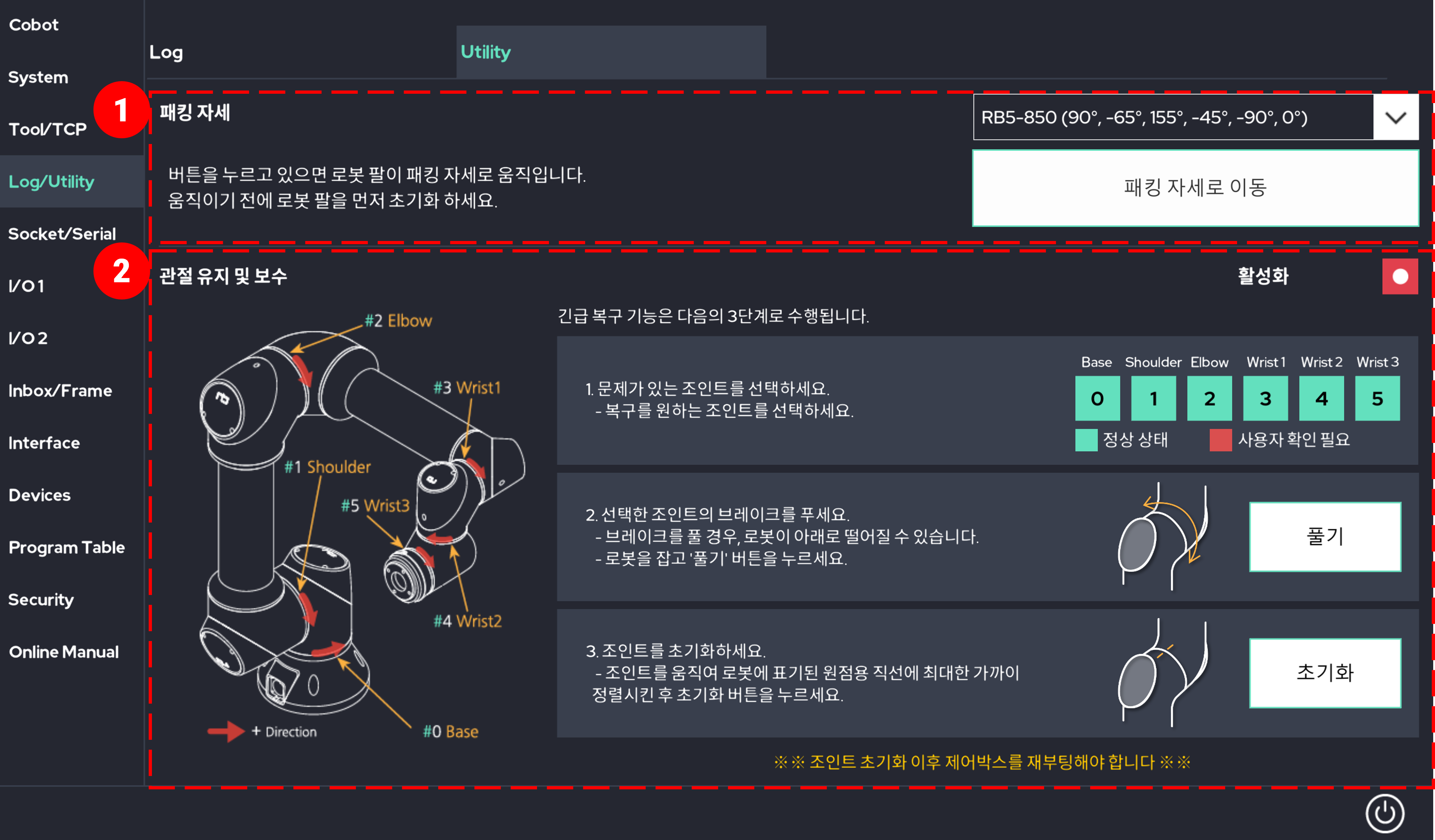
로봇을 포장할 때의 자세를 만들 수 있습니다.
이 기능을 사용하기에 앞서 로봇 팔은 활성화 되어있어야 합니다.
이 기능을 사용하기에 앞서 로봇 팔에 부착된 모든 부착물을 제거하세요.
버튼을 누르고 있는 동안 로봇 팔은 포장 자세로 이동합니다.
포장 자세에 도달하면, 포장 자세에 도달하였다는 알람이 뜹니다.축의 기준점을 공장 초기화 상태로 세팅할 수 있습니다.
이 기능은 로봇이 비정상 작동 시 복구를 위한 기능이므로 주의해서 사용해야 합니다.Step1. 리셋 할 축을 정합니다.
Step2. Release 버튼을 눌러 브레이크를 풀어 자유로운 상태로 만듭니다.
Step3. 축에 표시된 홈을 정렬하고 리셋 버튼을 눌러 축을 초기화 합니다.