로봇 구동하기
로봇을 구동하기 위해선 실행 화면(Play)로 이동하십시오.
경고
- 사용자는 로봇 팔을 구동하기 전에 로봇 시스템에 대한 위험성 평가를 충분히 수행한 후, 로봇에 적용 가능한 안전 기능을 모두 적용하고 로봇 팔을 구동해야 합니다
- 초기화 과정 중 로봇에 문제가 있거나, 로봇 설치 각도, 부하 설정 등이 부정확할 경우 로봇 초기화에 실패할 수 있습니다.
- Play 화면에서의 실행은 Simulation 없이 실제 로봇이 움직입니다. 사용법을 충분히 숙지한 후 사용하기 바랍니다.
- 구동 중에는 Make 나 Setup과 같은 다른 화면으로 이동이 불가능 합니다. 화면 전환을 위해서는 동작 중인 프로그램을 완전히 정지시킨 이후 사용하시기 바랍니다.
- 구동 중에는 태블릿 UI와 컨트롤 박스가 연결된 USB선을 뽑아도 무방합니다.
실행 화면은 다음과 같습니다.
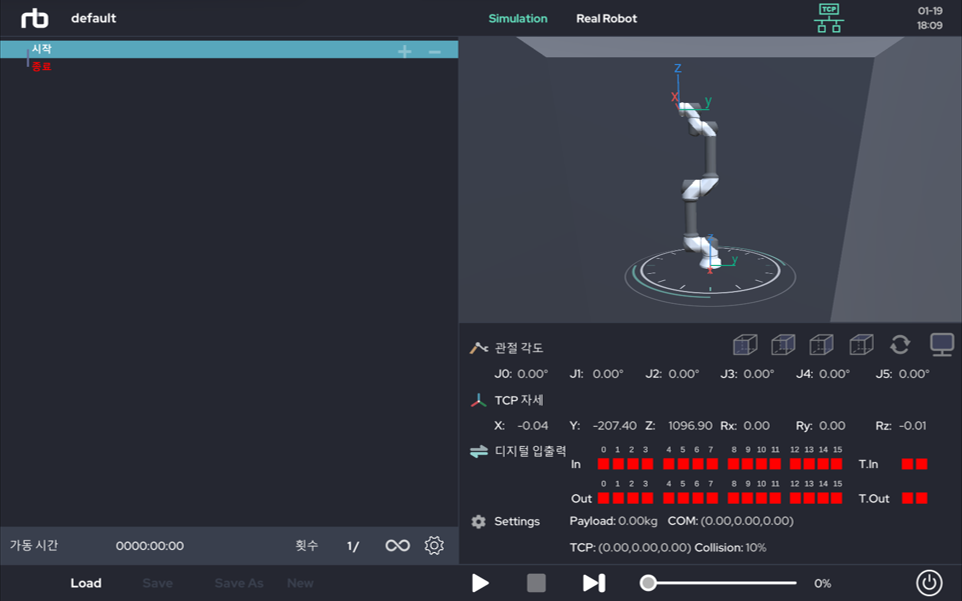
- 로봇의 연결 상태를 확인하시기 바랍니다. 로봇이 연결되어 있지 않다면 6.2를 참고하셔서
 아이콘을 이용하여 로봇과 연결하십시오. 이 때의 주의사항에 유의하시기 바랍니다.
아이콘을 이용하여 로봇과 연결하십시오. 이 때의 주의사항에 유의하시기 바랍니다. - 저장된 프로젝트를 불러옵니다. 프로젝트 불러오기는 6.6을 참고하시기 바랍니다.
- 모든 셋팅이 끝났다면 화면 하단 부분에 있는 PLAY 버튼을 누릅니다.
- 로봇의 상태가 초기위치에 위치해 있지 않을 경우 안내창이 뜹니다. 접근 버튼을 눌러 로봇과 초기위치를 일치시킵니다.
- 기본적으로 실행 화면에서 로봇을 구동하게 되면 실행하고 있는 프로젝트는 무한으로 반복하게 됩니다. 하단의 횟수 버튼을 눌러 반복 횟수를 지정할 수 있습니다.
- 작업이 실행 중에도 속도조절이 가능합니다.