시스템 구성
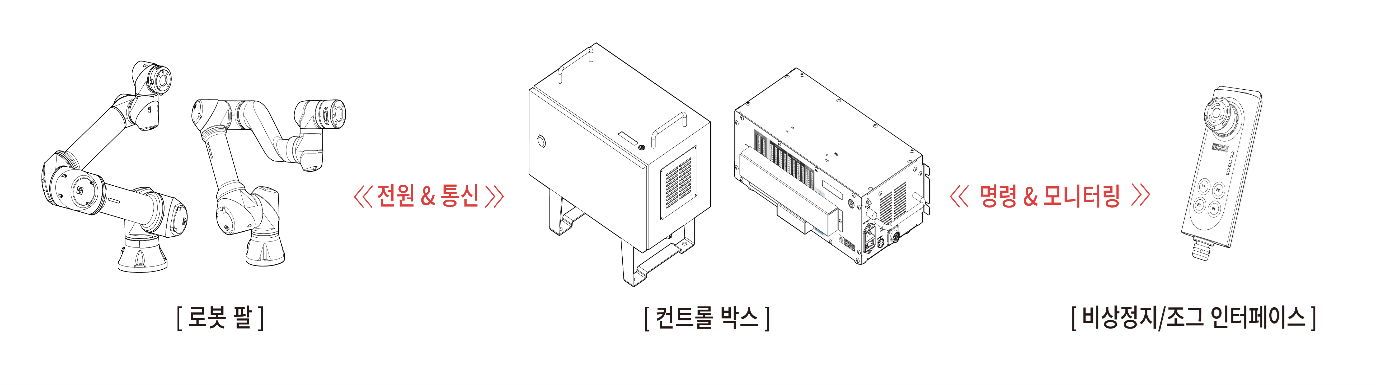
로봇 시스템 구성은 다음과 같습니다.
TIP
제품 이미지는 이해를 돕기 위한 것이며, 제품 사양에 따라 외관이 변경될 수 있습니다.
- 로봇 팔: 소형 물체를 운반하거나 부품을 조립하는 단순 업무를 반복하는 곳에 사용할 수 있는 산업용 협동 로봇으로 다양한 로봇 손(gripper)과 여러 형태의 툴을 부착하여 사용할 수 있습니다.
- 컨트롤 박스: 사용자가 작성한 프로그램에 따라 로봇 팔의 움직임을 제어합니다. 디지털 및 아날로그 입출력 포트를 갖추고 있어 다양한 장비 및 장치를 연결하여 사용할 수 있습니다.
- 비상정지/조그 인터페이스: 비상 정지 스위치가 있어서, 로봇을 운용을 정지할 수 있습니다. 재생/정지 등 간단한 프로그램 흐름 제어 버튼이 함께 있습니다.
- 태블릿 PC (옵션): 시스템 운영에 사용하는 장치로 로봇에게 특정 자세를 학습시키거나 로봇의 각종 제어 및 설정을 할 수 있습니다.
제공하는 로봇 시스템의 구성품은 다음과 같으며, 총 2개의 박스가 제공됩니다.
- 로봇 팔
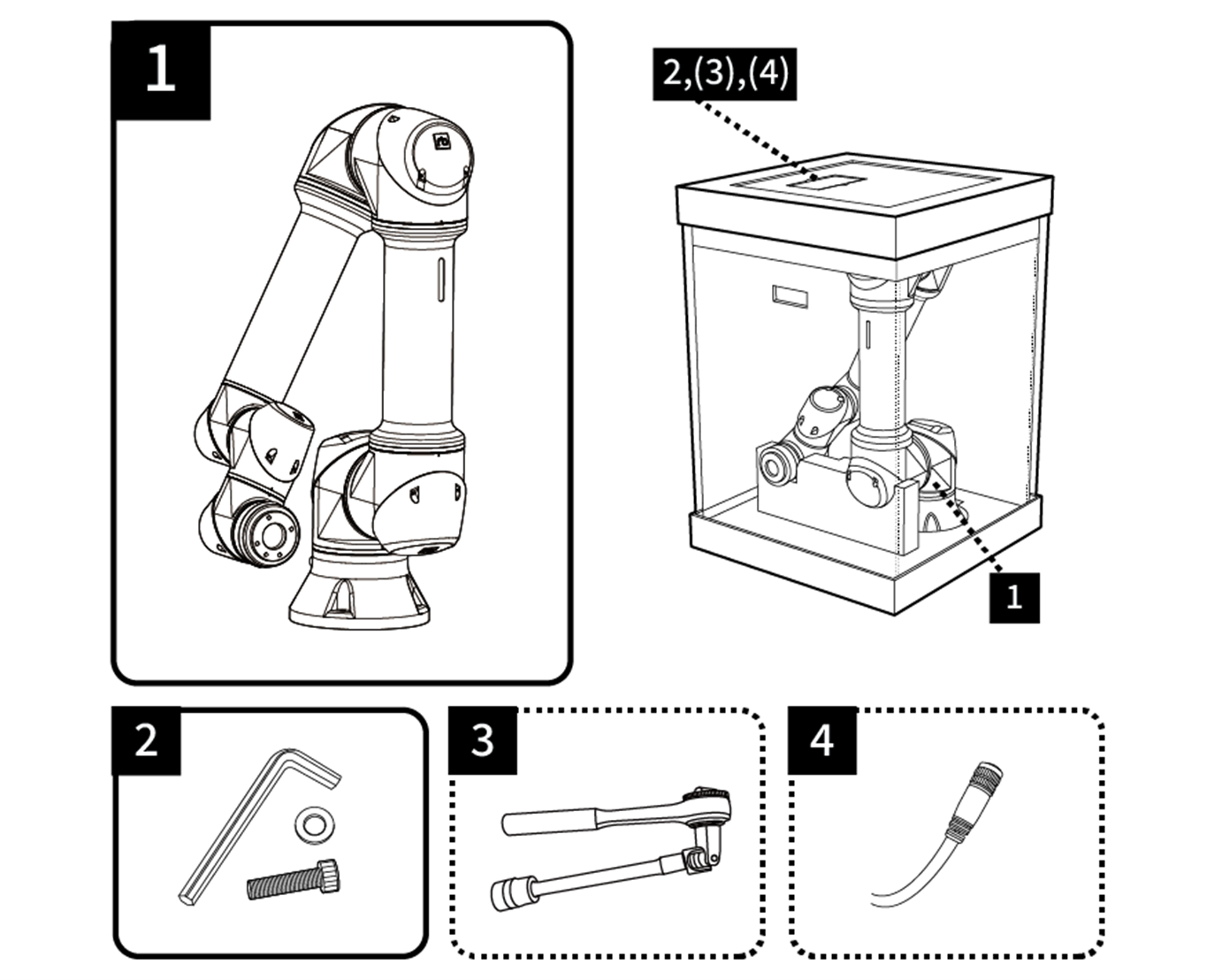
- ( ) 해당 표시 항목은 옵션 제품입니다.
| 로봇 | 1 | 로봇 팔 | 1 EA |
|---|---|---|---|
| 툴 박스 | 2 | 볼트, 와셔, 렌치 | 1 SET |
| (3) | NSF 모델 전용 툴 – 베이스 고정 공구 | 1 EA | |
| (4) | 툴 I/O 케이블 | 1 EA |
TIP
- NSF 모델 전용 툴의 경우, NSF 모델의 구성품에만 해당됩니다.
- 본 설명서의 구성품은 로봇 사양에 따라 일부 변경될 수 있으며, 제품 이미지는 이해를 돕기 위한 것이므로 실물과 다르게 보일 수 있습니다.
- 컨트롤 박스
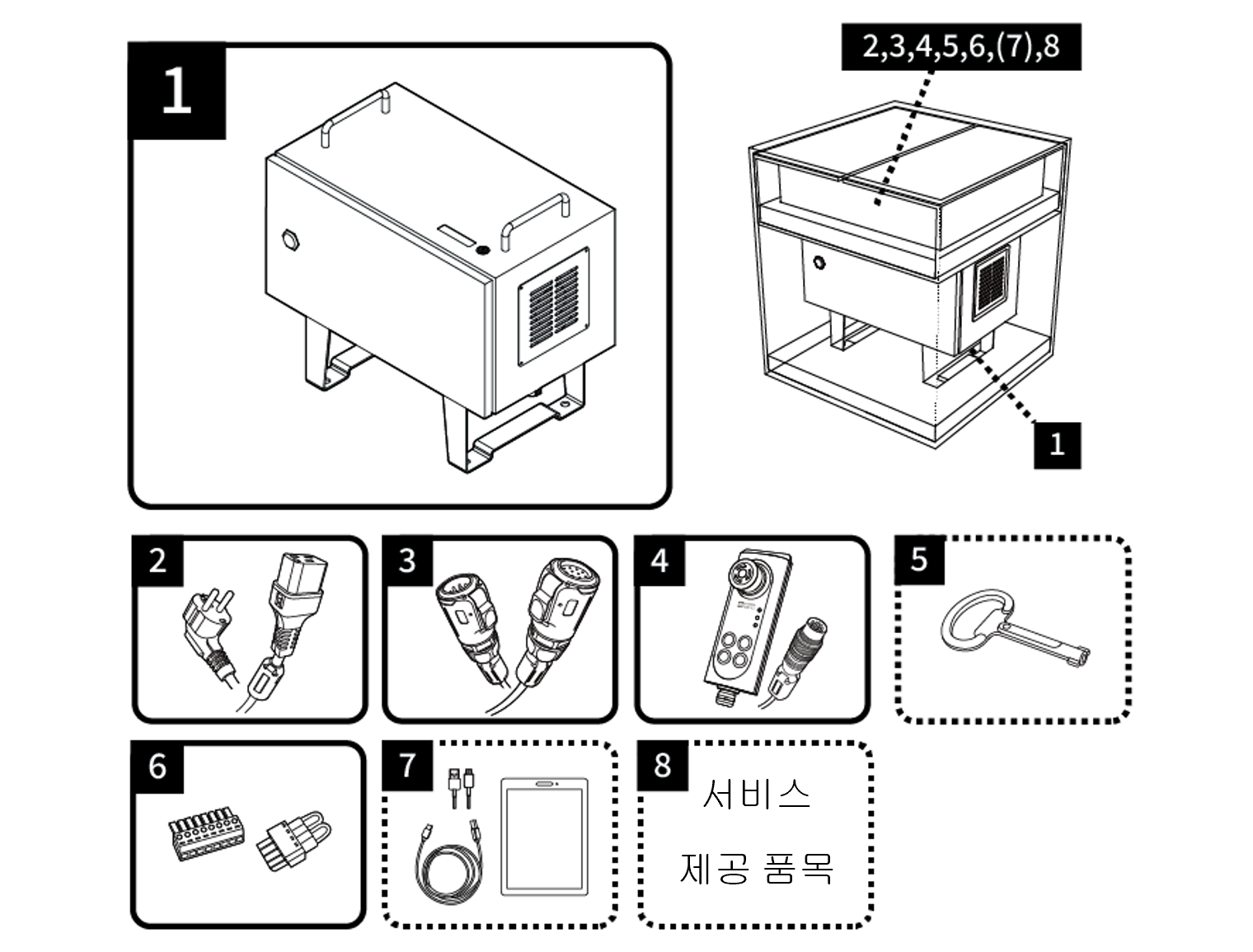
- ( ) 해당 표시 항목은 옵션 제품입니다.
| 시스템 구성품 | 1 | 컨트롤 박스 | 1 EA |
|---|---|---|---|
| 악세사리 박스 | 2 | AC 전원 케이블 | 1 SET |
| 3 | 로봇 – 컨트롤 박스 연결 케이블 | 1 EA | |
| 4 | 비상 정지/조그 인터페이스 | 1 EA | |
| 5 | 컨트롤 박스 열쇠 | 1 EA | |
| 6 | I/O 터미널 단자대 (예비용), 퓨즈 | 1 SET | |
| (7) | 태블릿, 짧은 USB케이블, 긴USB케이블 | 1 EA | |
| 8 | 서비스 제공 품목 (예시: USB, 외부 케이블 고정용 벨크로 등) | 각 1 SET |
TIP
- 위 컨트롤 박스의 경우, 로봇 사양에 따라 외관이 변경될 수 있습니다.
- AC전원 케이블, 로봇 팔 – 컨트롤 박스 연결 케이블은 제조사가 제공하는 5m 케이블, 비상정지/조그 인터페이스 케이블은 제조사가 제공하는 3m 미만의 케이블을 사용할 것을 권장합니다. 실드 LAN 케이블, I/O 포트 연결 케이블, USB 케이블, 전선 통과 모델에 사용하기 위한 외부 전선 라인의 경우 3m 미만의 케이블을 사용할 것을 권장합니다.
- 사용자는 소형 컨트롤박스의 I/O 포트를 외부로 연결하여 사용하는 경우에 보호덮개의 아래부분에 제공하는 홀(hole)에 케이블 고정장치를 반드시 설치하여 사용하여야 합니다. 케이블 고정이 제대로 되지 않아 문제가 발생시 제조사는 책임을 지지 않습니다.
- 서비스 제공품목과 구성은 예고 없이 변경될 수 있습니다.