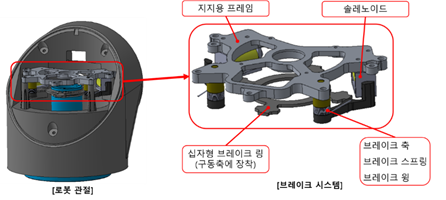
기계적 멈춤 장치 (Brake System)
로봇 팔의 각 축에 설치된 기계적 멈춤 장치(Brake System)의 구성은 지지용 프레임, 솔레노이드, 브레이크 링, 브레이크 축, 브레이크 스프링, 브레이크 윙으로 구성되어 있으며, 로봇 관절에 아래의 그림과 같이 설치되어 있다.
솔레노이드가 ON되는 경우에 브레이크 링의 회전반경과 브레이크 윙 사이의 물리적 간섭이 해제되고, 솔레노이드가 OFF되는 경우에는 브레이크 링의 말단부와 브레이크 윙 사이의 물리적 간섭이 발생하여 구동축의 회전이 정지하게 된다.
브레이크 링이 회전하며 브레이크 윙을 밀고 지나가면 윙은 스프링의 힘으로 복귀하며, 이후 물리적 간섭을 통해 양방향 브레이크가 발생하여 구동축의 양방향 회전이 모두 정지된 상태로 유지된다.