Set-up (Interface)
사용자가 로봇 및 UI를 운용하는데 필요한 세팅을 수행합니다.
1. 일반 설정
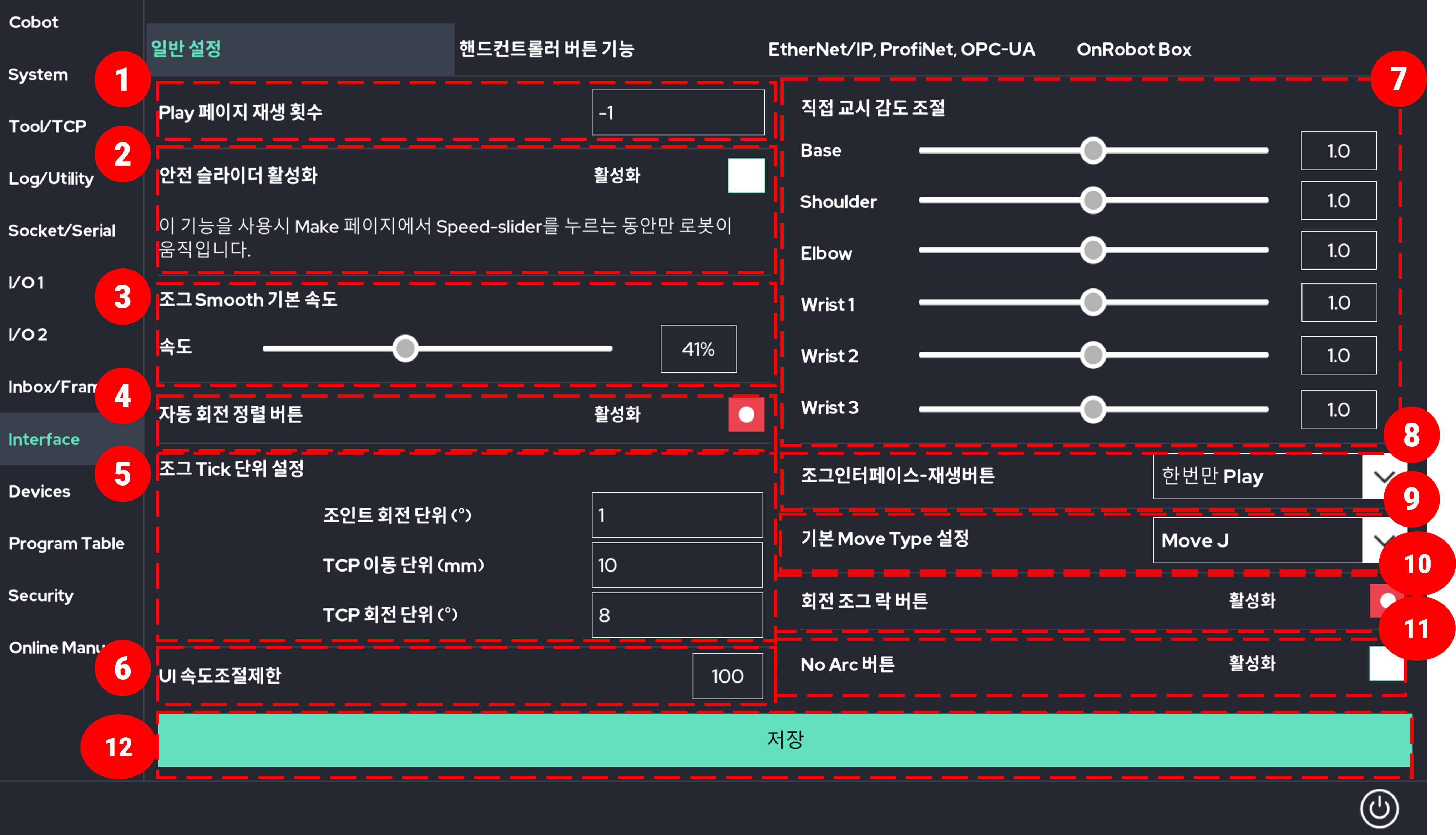
- Play 화면에서 반복할 횟수를 입력합니다.
- Make 화면에서 안전 슬라이더 기능을 사용할지 선택합니다.
안전 슬라이더 기능 사용 시, 사용자가 화면에서 손을 때면, 속도 조절 바가 0으로 돌아옵니다.
안전 슬라이더 기능 해제 시, 사용자가 원하는 레벨로 속도 조절 바를 세팅해 놓고, 손을 화면에서 때면, 해당 속도 조절 바 옵션이 유지됩니다. - Make 화면 조그 Jog 기능의 Smooth 옵션 사용시 사용할 속도를 정합니다.
- Make 화면 조그 하단에, 자동 회전 정렬 기능 버튼의 시각화 유무를 선택합니다.
- Make 화면 조그 Jog 기능의 Tick 옵션 사용시 얼마만큼 이동할지 세팅합니다.
- UI 상의 속도 조절바 상한 값을 제한합니다.
- 각 관절마다 직접 교시 감도를 설정할 수 있습니다. 직접 교시 감도가 높을수록 적은 힘으로 조작할 수 있습니다.
- 당사에서 제공하는 전용 조그/비상정지 인터페이스 장치를 사용할 경우, 장치에 있는 재생 버튼의 역할을 정의합니다.
- Make 화면의 동작의 기본 설정을 합니다.
- Make 화면 조그 하단에, 자동 회전 정렬 기능 버튼의 시각화 유무를 선택합니다.
- Make 화면에서 No Arc 버튼을 활성화/비활성화 할 수 있습니다.
- 변경된 세팅을 저장합니다.
2. 핸드컨트롤러 버튼 기능
주의
- 안전상의 이유로 핸드 컨트롤러 장착 상태는 가급적 Mounted(connected)로 사용하시기 바랍니다.
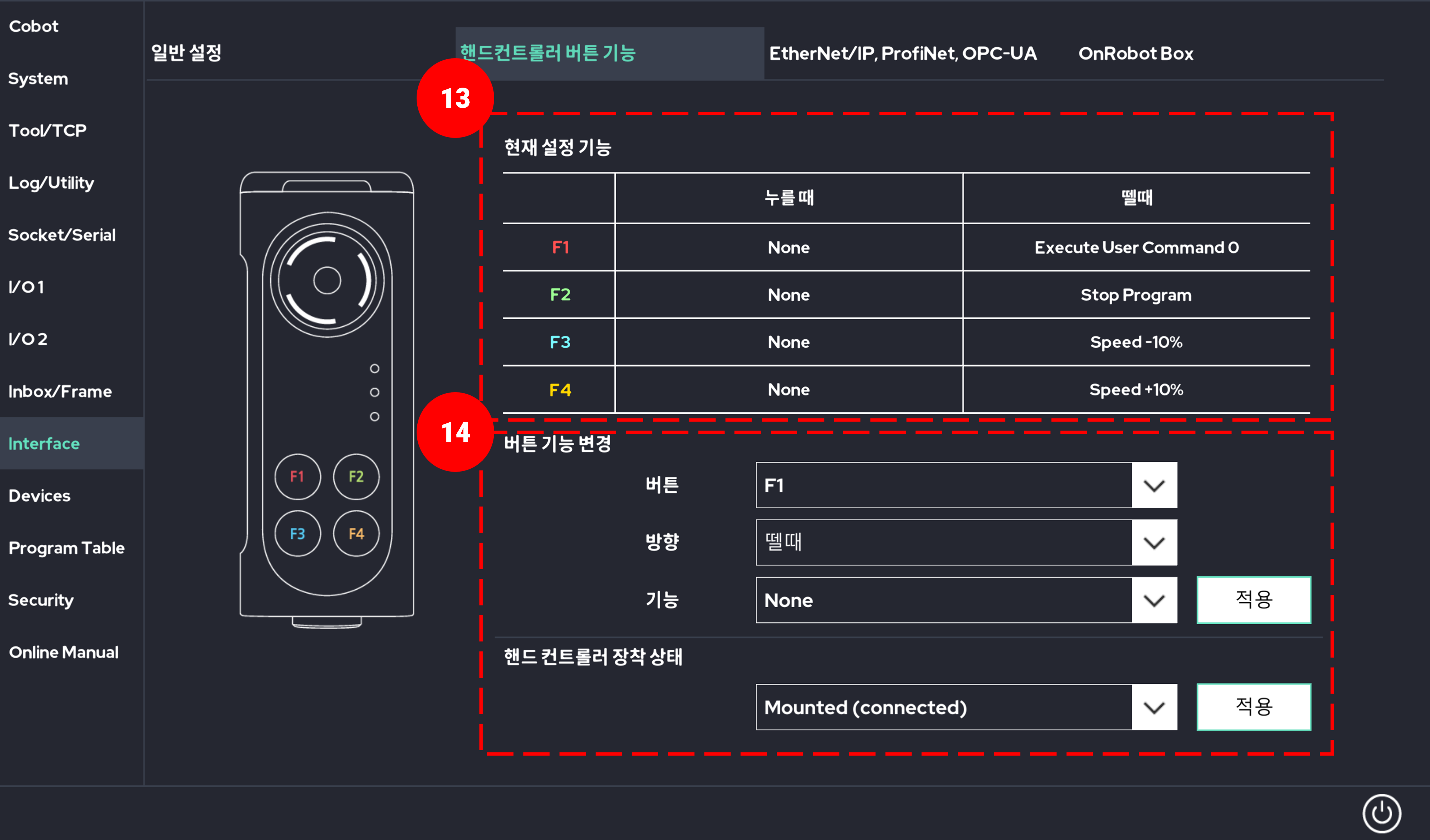
- 비상 정지 버튼 하단의 부가 기능 버튼의 설정 값을 확인할 수 있습니다.
부가 기능 버튼을 누르면, 각 버튼에 해당하는 번호에 불이 들어옵니다. 이를 통해 UI에서 정상 작동하는지 확인할 수 있습니다. - 버튼 기능 변경 : 각 버튼에 기능을 설정할 수 있습니다.
- 핸드 컨트롤러 장착 상태 : 로봇 팔 활성화시 핸드 컨트롤러를 연결하여 사용할지 연결하지 않고 사용할지 설정할 수 있습니다.
- 버튼 기능 변경 : 각 버튼에 기능을 설정할 수 있습니다.
3. EtherNet/IP, ProfiNet, OPC-UA, REST API
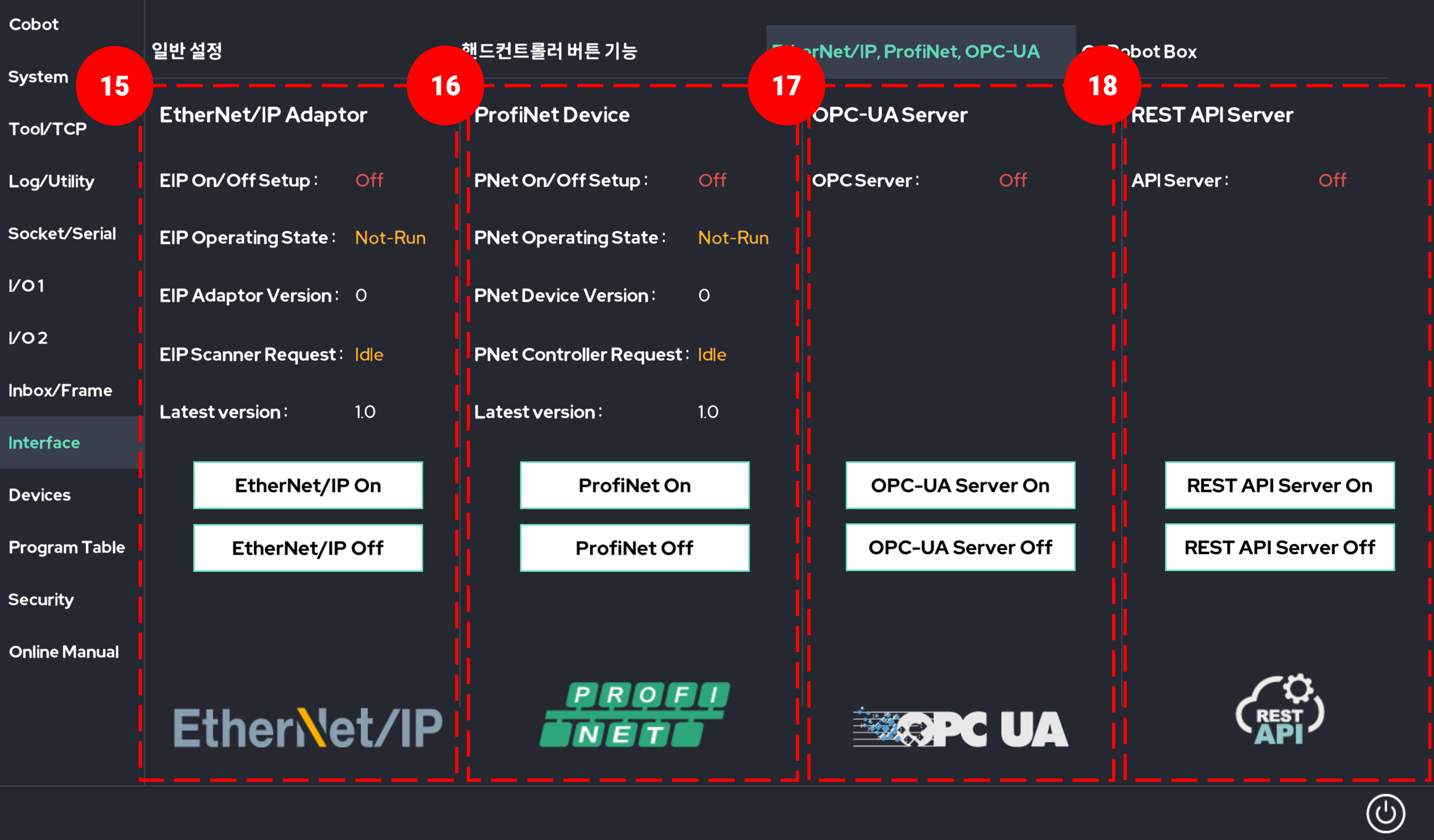
- Ethernet/IP Adapter 기능을 On/Off 할 수 있으며, 현재 상태에 대한 확인이 가능합니다.
- ProfiNet Device 기능을 On/Off 할 수 있으며, 현재 상태에 대한 확인이 가능합니다.
- OPC-UA Server 기능을 On/Off 할 수 있습니다.
- REST API Server 기능을 On/Off 할 수 있습니다.
4. OnRobot Box
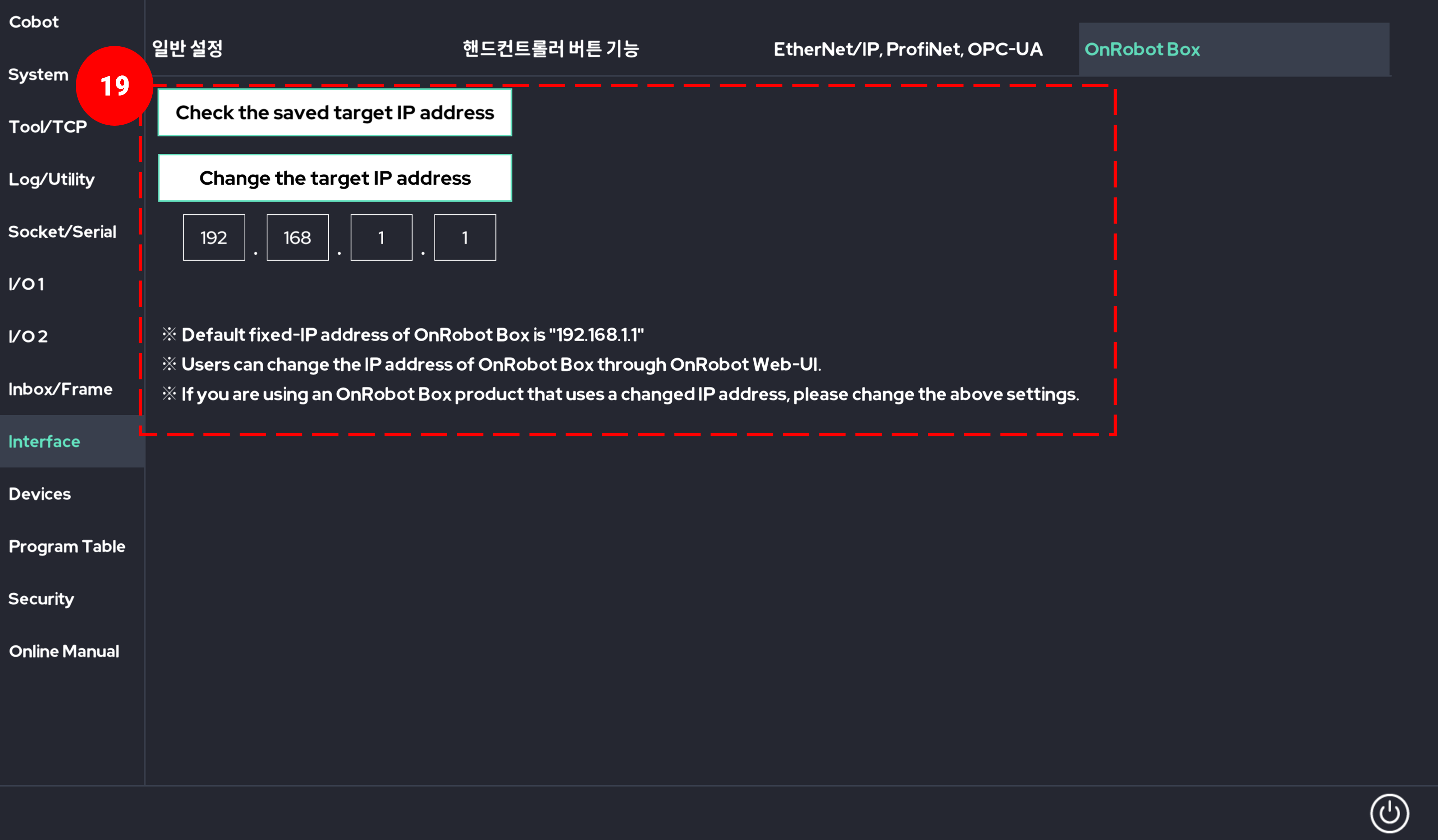
- On-Robot Box에 설정하기 위한 IP를 설정합니다.