로봇 운용 중 발생한 특이사항 대처방법
로봇 운용 중에는 여러가지 문제 상황이 발생할 수 있고 그에 따른 대처법들이 있습니다.
1. 외부 충돌(Out Collision)
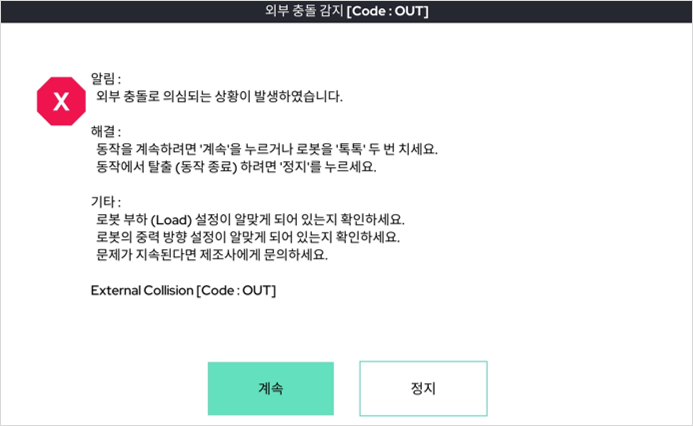
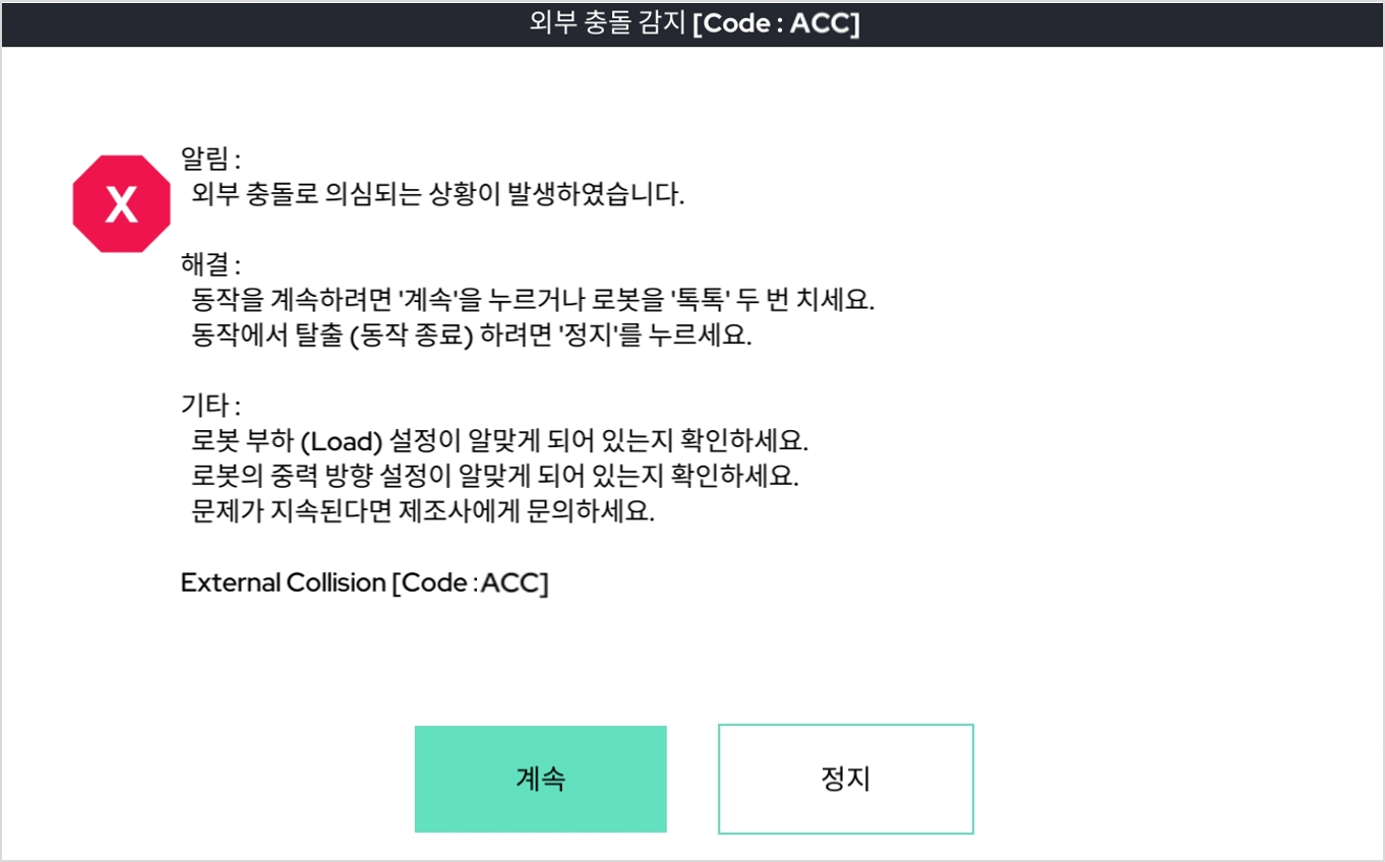
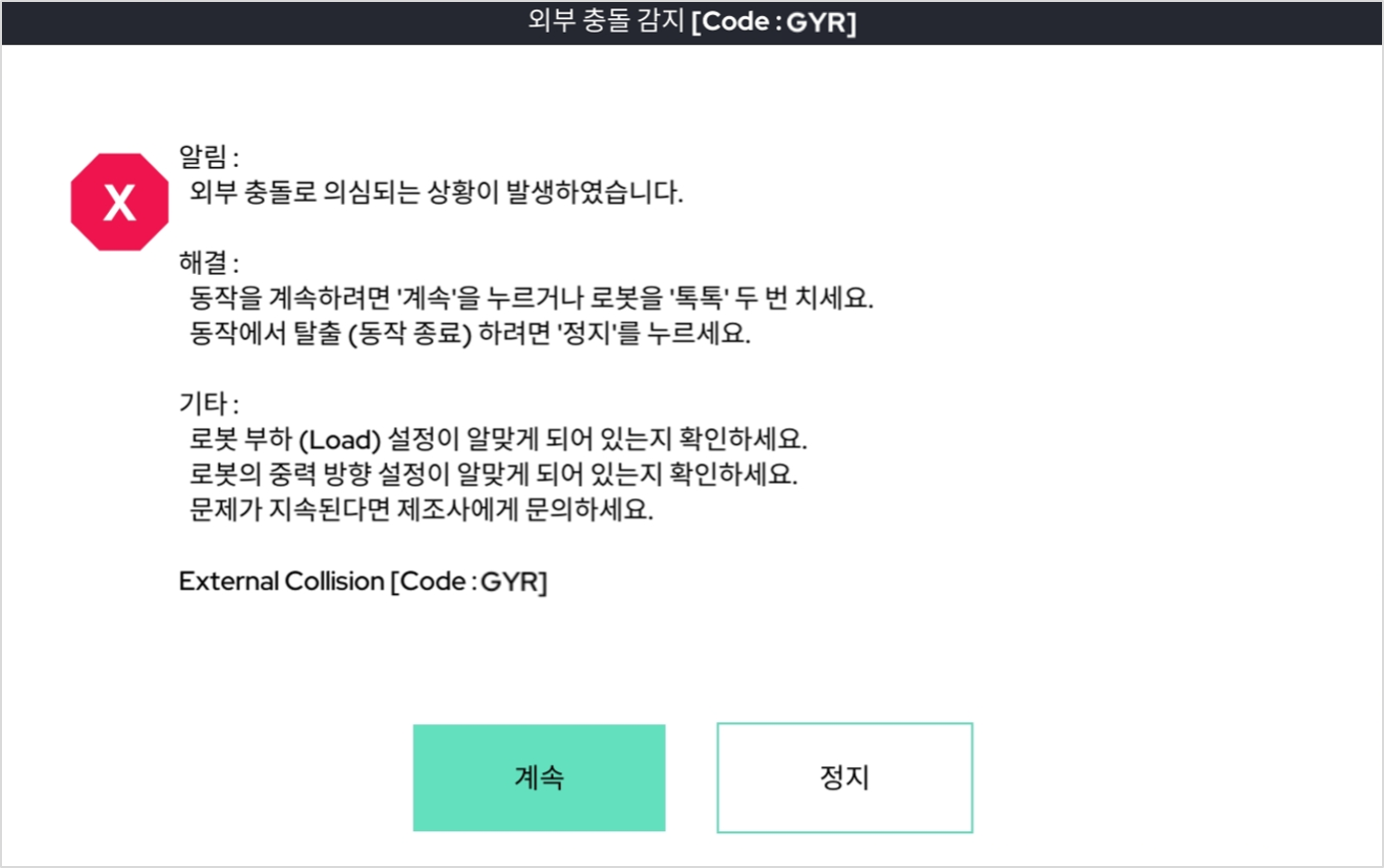
로봇이 작동 중에 외부의 물체와 충돌했을 때 로봇이 작업을 일시정지 합니다.
각 위 그림을 보면 외부 충돌 코드가 있는데, 각각의 의미는 아래와 같습니다.
- OUT : 충돌에 의한 과전류가 각 관절의 전류 센서에서 측정 될 때
- ACC, GYR : 충돌에 의해 순간 빠른 진동이 로봇에 측정 될 때
우선 외부 충돌 요인을 제거합니다. 이후 두가지의 선택지가 있습니다.
로봇이 하던 작업을 중단하고 정비를 하려면 Halt 버튼을 눌러 작업을 종료합니다.
로봇이 하던 작업을 계속하기 위해서는 Resume 버튼을 눌러 작업을 재개합니다.
cf) TOK TOK 회복법
외부 충돌로 인한 일시 정지 시 로봇 팔의 말단부를 가볍게 2회 두드리면 일시정지 상태가 회복됩니다(Resume 버튼과 동일 효과).
2. 자가 충돌 (Self Collision)
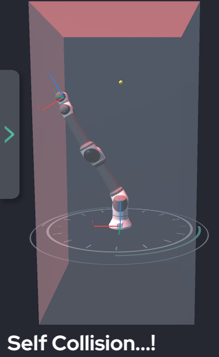
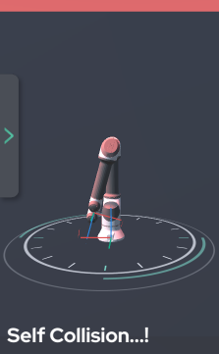
첫번째 그림과 같이 로봇의 일부분이 지정된 작업 범위를 벗어나거나, 두번째 그림과 같이 로봇 자체적으로 충돌 위험이 있는 모션에 근접했을 때 로봇이 작업을 정지합니다.
티칭 버튼을 사용하여 직접 교시 기능을 통해 로봇의 상태를 정상상태로 만들어야 합니다. 이후 티칭한 모션 및 작업 범위 설정을 검토합니다.
Make 화면의 Simulation 모드에서 발생시 다음과 같은 방법으로 복구할 수 있습니다.
- 로봇의 모션 관련 버튼을 통해 로봇을 자가충돌상황에서 회복.
- Real 모드로 일시적으로 변경해 실제 로봇의 관절 정보를 받아 회복.
- 티칭 버튼을 눌러 실제 로봇의 관절 정보를 받아 회복.
3. 알람 메시지
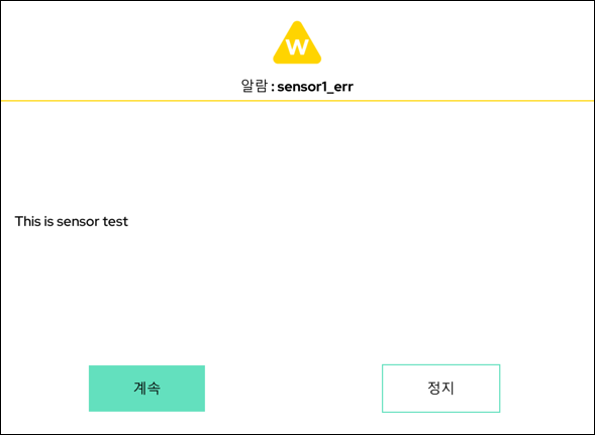
프로그램이 진행되는 중 Alarm 메시지 기능이 실행될 때 로봇이 작업을 일시 정지합니다.
Resume 버튼을 눌러 작업을 진행하거나, Halt 버튼을 눌러 작업을 정지 시킵니다.
4. 태블릿 PC 분리

컨트롤 박스(컨트롤러)와 태블릿 PC가 분리되거나 강제로 로봇 컨트롤 박스의 주전원(220V)을 차단 하였을 때 발생합니다.
USB 케이블이 손상되었을 경우 교체가 필요하며, 연결이 지속적으로 이루어 지지 않는다면, 다른 USB 포트로 시도해 보세요.
5. 외부 전력공급 중단
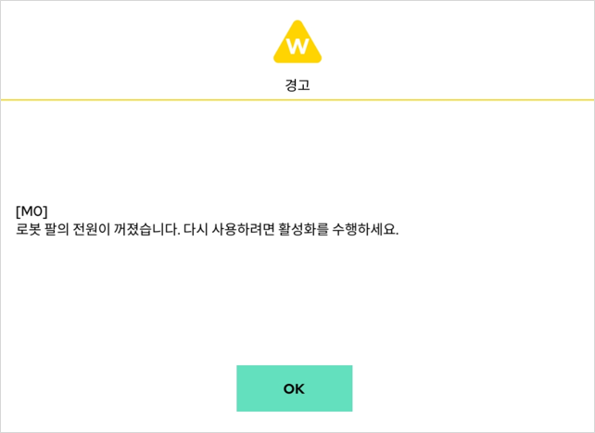
로봇 팔에 공급되는 전력이 중단될 때 발생합니다. 비상 정지 스위치를 누를 경우 나타납니다.
비상 정지 스위치를 정상적으로 복구한 후, 다시 로봇을 초기화 한 이후 사용합니다.
6. 관절 제어기 에러 검출
관절제어기에서 로봇을 제어하기 어렵다고 판단되는 경우에 로봇을 정지합니다.
다음과 같은 항목이 존재합니다.
| BIG Error | 입력 레퍼런스와 엔코더의 차이가 특정 값 이상 벌어졌을 때 발생 |
|---|---|
| JAM Error | 엔코더 값이 변화가 없으나 특정 값 이상의 전류가 특정 시간 이상 흐를 때 발생 |
| CUR Error | 특정 값 이상의 전류가 특정시간 이상 흐를 때 발생 |
| Temperature Error | 제어보드의 온도가 특정 값 이상일 때 발생 |
| Mode Error | 메인 제어기에서 명령한 제어모드가 현재 관절제어기의 모드와 일치하지 않을 때 발생 |