로봇 팔
각 부분의 명칭
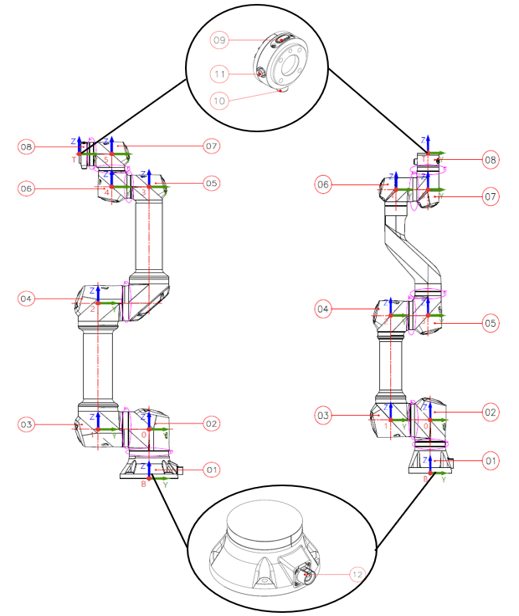
| No. | 명칭 | 설명 |
|---|---|---|
| ① | Base | 로봇을 고정시키기 위한 부분 |
| ② | J0 : Base Joint | - |
| ③ | J1 : Shoulder Joint | - |
| ④ | J2 : Elbow Joint | - |
| ⑤ | J3 : Wrist 1 Joint | - |
| ⑥ | J4 : Wrist 2 Joint | - |
| ⑦ | J5 : Wrist 3 Joint | - |
| ⑧ | Tool Flange | 로봇에 그리퍼 또는 툴을 장착하는 부분 |
| ⑨ | 티칭버튼 | 직접교시 티칭을 위한 버튼 |
| ⑩, ⑪ | I/O Connector A(⑩), B(⑪) (Non E, E-Version : ⑩ / U-Version : ⑩,⑪) | 그리퍼 또는 툴 제어를 위한 입/출력 포트 |
| ⑫ | 로봇-컨트롤박스 커넥터 | 로봇 팔과 컨트롤박스 사이의 케이블 연결 커넥터 |
로봇 팔의 형태 및 치수 정보
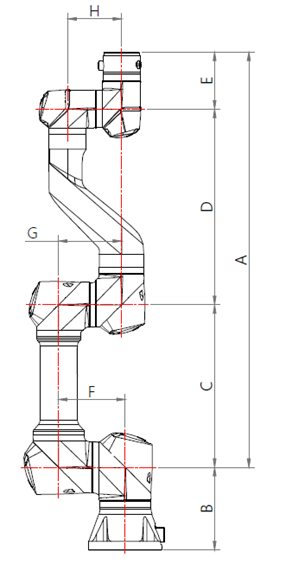 단위 (mm)
단위 (mm)| 모델 | A | B | C | D | E | F | G | H |
|---|---|---|---|---|---|---|---|---|
| RB3-730ES Series | 730 | 145.3 | 286 | 344 | 100 | 117.15 | 110.7 | 94.6 |
| RB6-920ES Series | 920 | 165.5 | 400 | 423.3 | 96.7 | 151.4 | 129.2 | 110.7 |
| RB20-1900ES Series | 1900 | 241 | 885 | 885 | 130 | 254.5 | 187.5 | 129.2 |
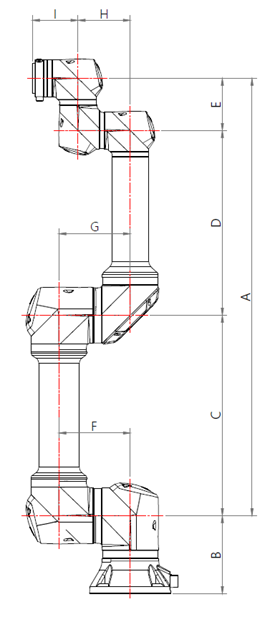 단위 (mm)
단위 (mm)| 모델 | A | B | C | D | E | F | G | H | I |
|---|---|---|---|---|---|---|---|---|---|
| RB5-850E Series | 927.7 | 165.5 | 425 | 392 | 110.7 | 151.4 | 151.4 | 110.7 | 96.7 |
| RB3-1200E Series | 1200 | 165.5 | 566.9 | 522.4 | 110.7 | 151.4 | 151.4 | 110.7 | 96.7 |
| RB10-1300E Series | 1300 | 197 | 612.7 | 570.15 | 117.15 | 187.5 | 151.4 | 117.15 | 115.3 |
| RB16-900E Series | 900 | 197 | 412.7 | 370.15 | 117.15 | 187.5 | 151.4 | 117.15 | 115.3 |
RB5-850EA#, RB3-1200EA#, RB10-1300EA#, RB16-900EA#, RB6-920ESA#, RB20-1900ESA# (공압/전선 내장형) 사용법
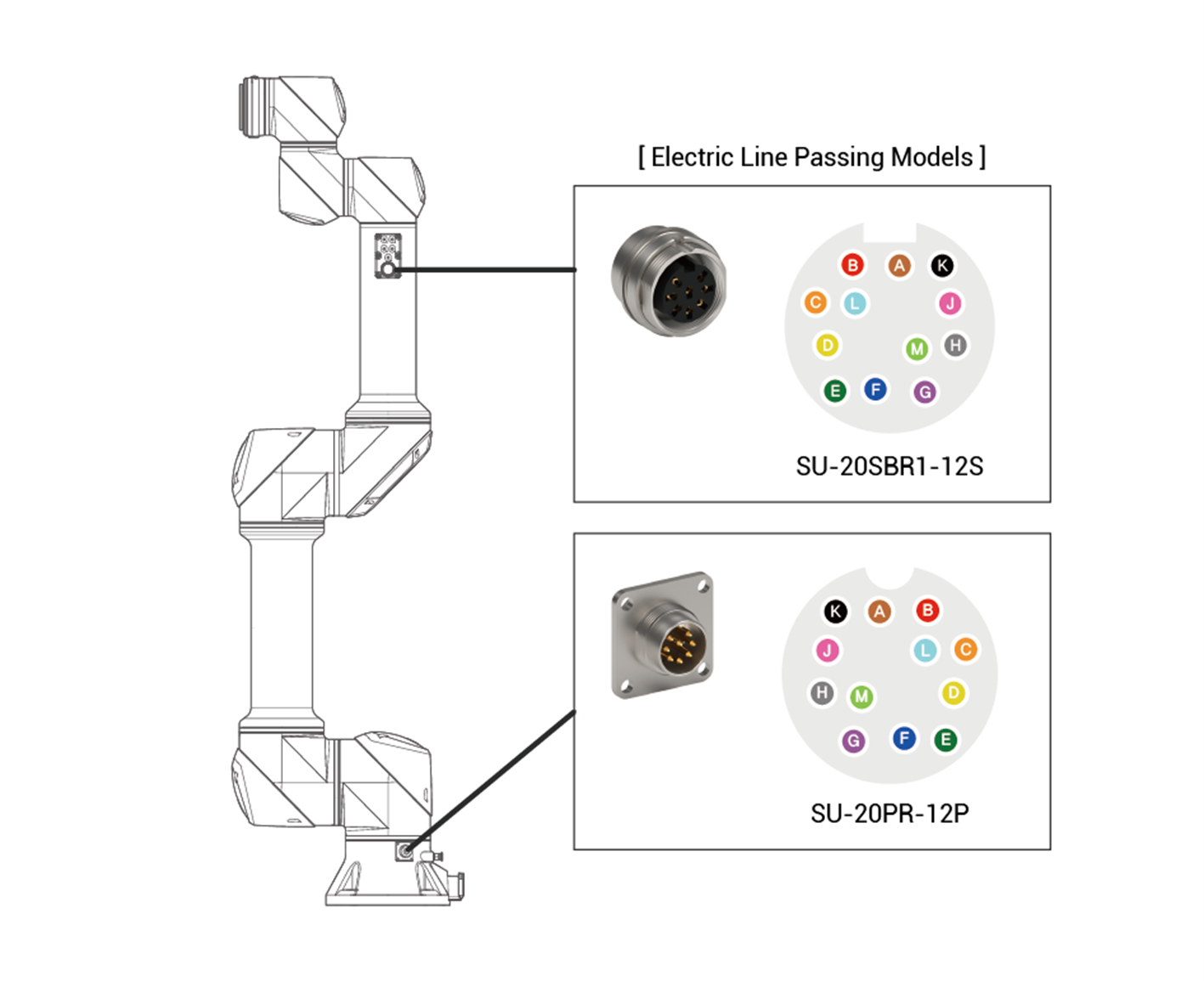
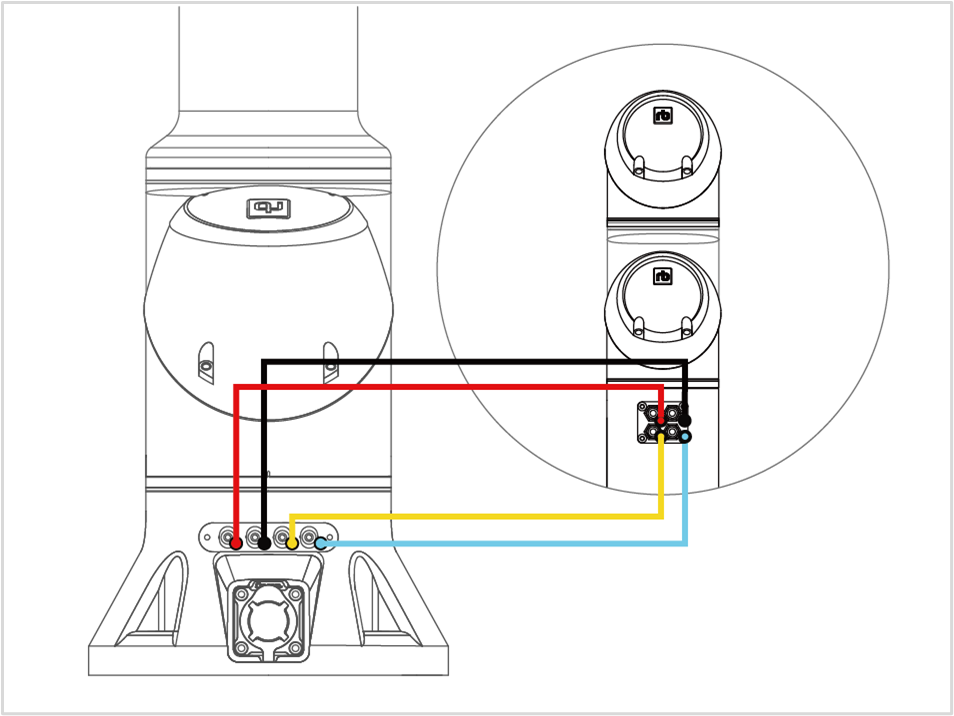
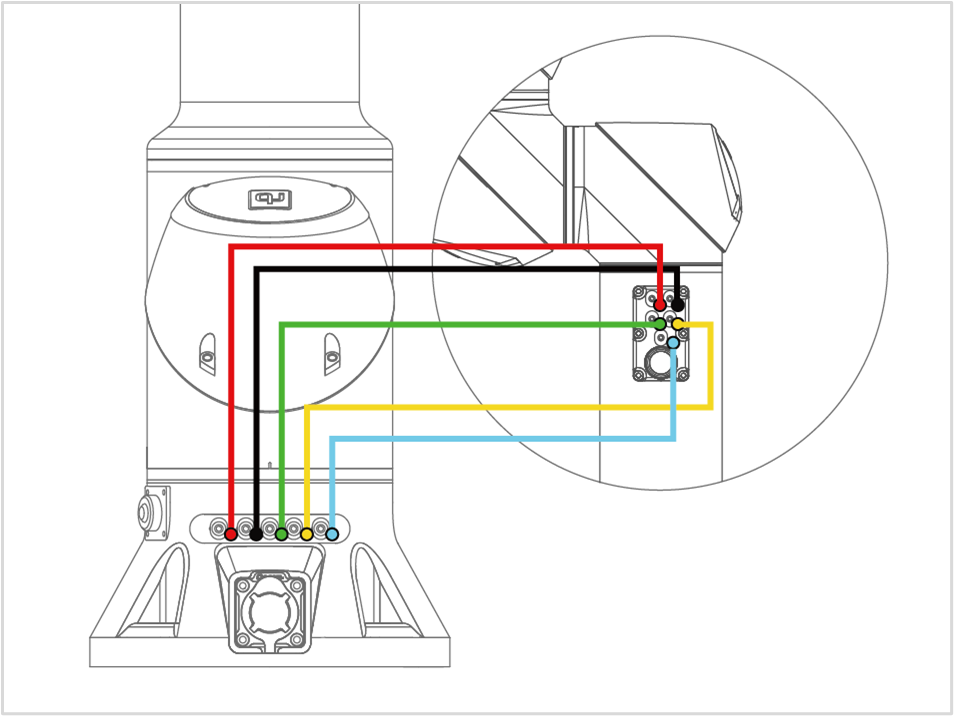
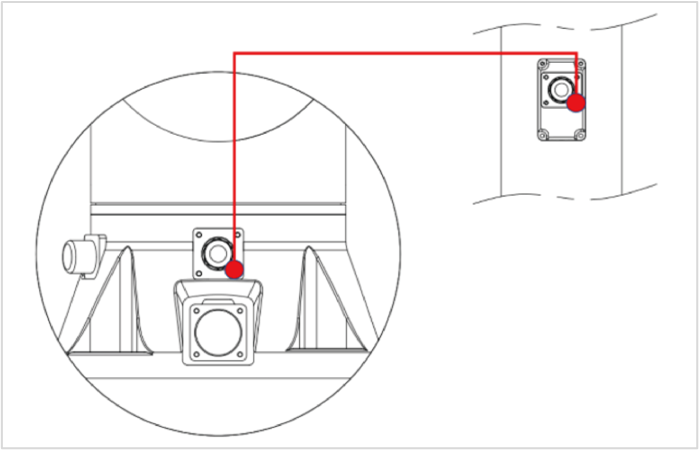
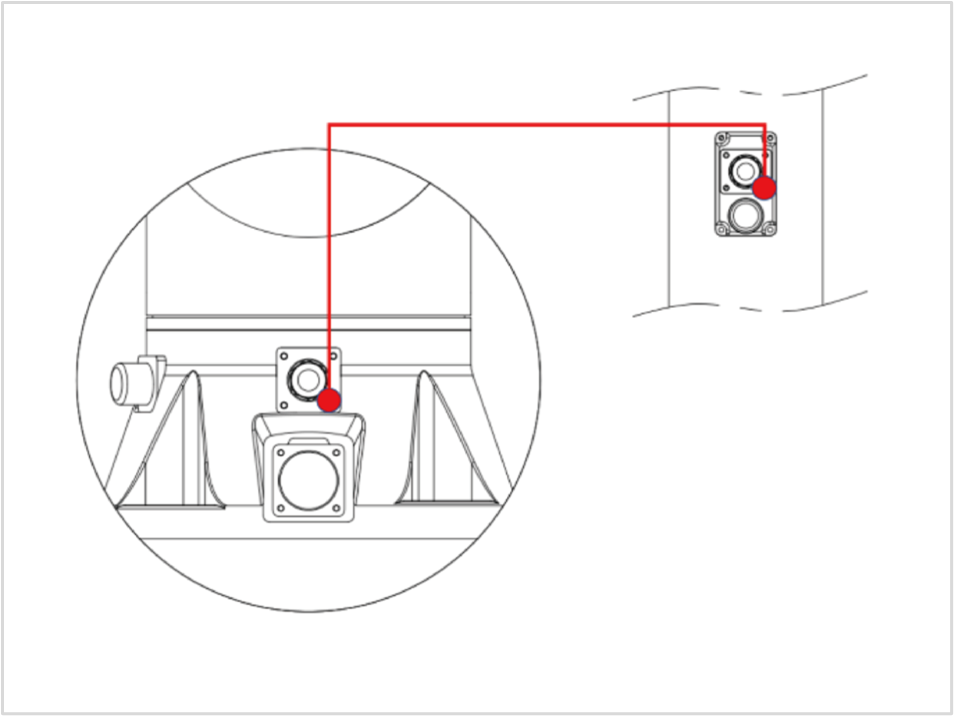
- RB5-850EA#, RB3-1200EA#, RB10-1300EA#, RB16-900EA#, RB6-920ESA#, RB20-1900ESA# 모델의 공압 라인 및 전선 라인은 다음 표와 같이 제공되며, 위의 그림을 참조하여 사용하시기 바랍니다.
| 모델명 | 공압 라인 | 전선 라인 |
|---|---|---|
| RB5-850EA1 | 최대 4개(4∅ 공압튜브) | 없음 |
| RB5-850EA2 | 최대 5개(4∅ 공압튜브) | 12핀(AWG28) |
| RB3-1200EA1 | 최대 4개(4∅ 공압튜브) | 없음 |
| RB3-1200EA2 | 최대 5개(4∅ 공압튜브) | 12핀(AWG28) |
| RB10-1300EA1 | 1개(8∅ 공압튜브) | 없음 |
| RB10-1300EA2 | 1개(8∅ 공압튜브) | 12핀(AWG28) |
| RB10-1300EA3 | 최대 4개(4∅ 공압튜브) | 없음 |
| RB16-900EA1 | 최대 4개(4∅ 공압튜브) | 없음 |
| RB16-900EA2 | 1개(8∅ 공압튜브) | 없음 |
| RB6-920ESA1 | 최대 4개(4∅ 공압튜브) | 없음 |
| RB20-1900ESA1 | 최대 4개(4∅ 공압튜브) | 없음 |
| RB20-1900ESA2 | 1개(8∅ 공압튜브) | 없음 |
- 공압 라인의 갯수는 작동범위 확인 후 조정이 필요함.
주의
- 공압/전선 내장형 모델의 경우, 정의된 규격 이상의 공압이나 전원을 통과시킬 경우, 하드웨어에 손상을 줄 수 있습니다.
로봇 팔 LED 상태
<아래 사진은 LED 상태를 보아 Real Robot 모드 상태입니다.>

1. 3개의 LED 중 1개만 점등된 경우,
로봇 팔에 전원이 인가 중인 상태를 의미합니다.
2. 3개의 LED 중에 2개가 점등된 경우,
로봇 팔의 부팅이 완료되었으며 Simulation 모드 상태를 의미합니다.
3. 3개의 LED가 모두 점등된 경우,
로봇 팔이 Real Robot 모드 상태임을 의미합니다.
4. 3개의 LED가 모두 점멸하는 경우,
프로그램이 실행 중인 상태를 의미합니다.