Set-up (Tool/TCP)
1. Default Tool
You can configure the settings related to the installed tool.
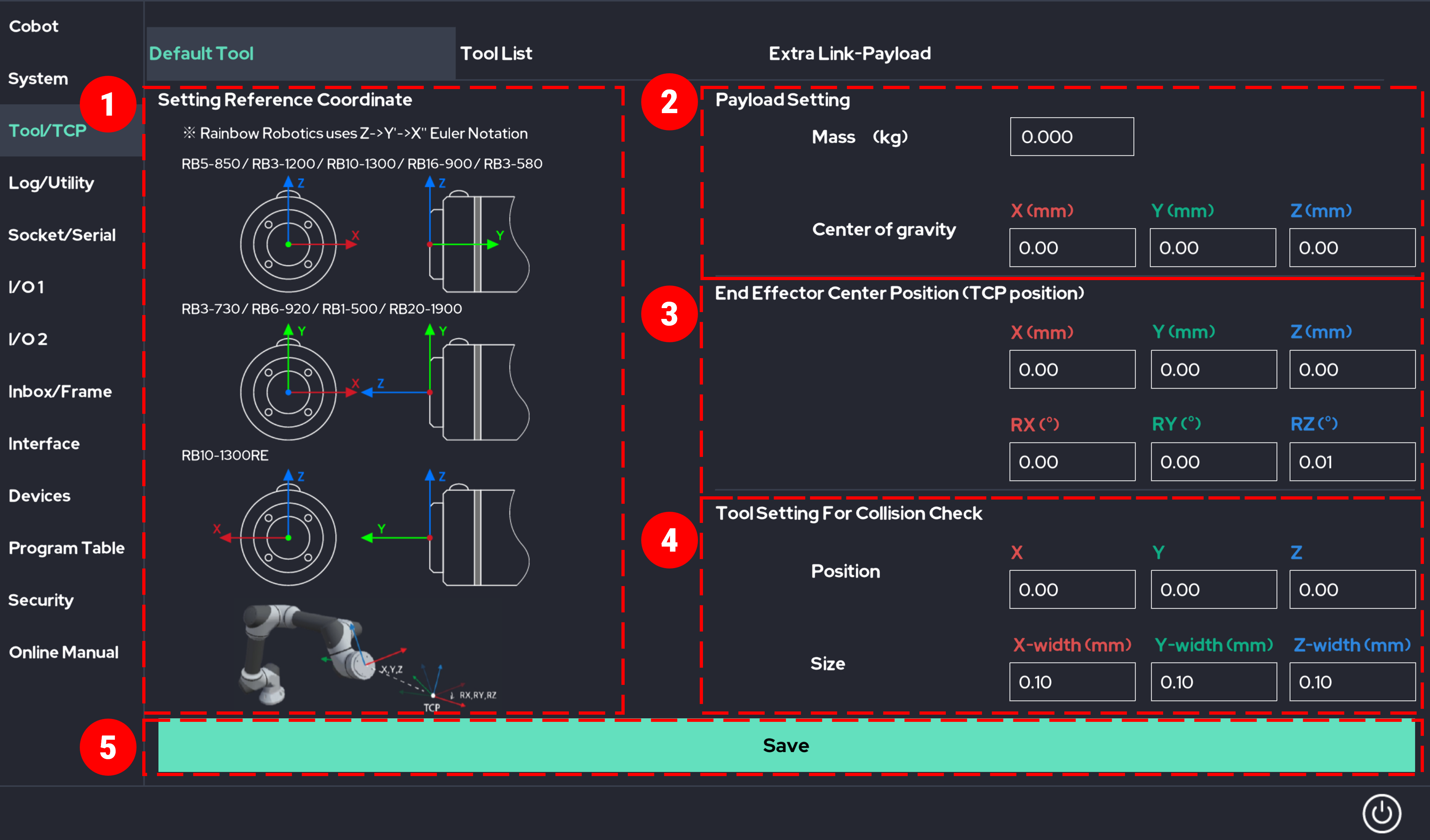
- The Tool Center Point (TCP) coordinate system for each robot model is displayed.
Enter the values on the right based on this coordinate system. - Set the load applied to the robot.
The mass should be entered in the 'Mass' field (unit: kg), and the input range varies depending on the robot model's rated load.
The distance to the center of gravity is entered in the 'Center of gravity' field (unit: mm). - Configure the TCP coordinate system. You can set the linear position (X, Y, Z) and rotation angles (RX, RY, RZ).
- Set the range of the tool area based on the TCP coordinate system. The area within this range is treated as a self-collision zone.
- Save the changed settings.
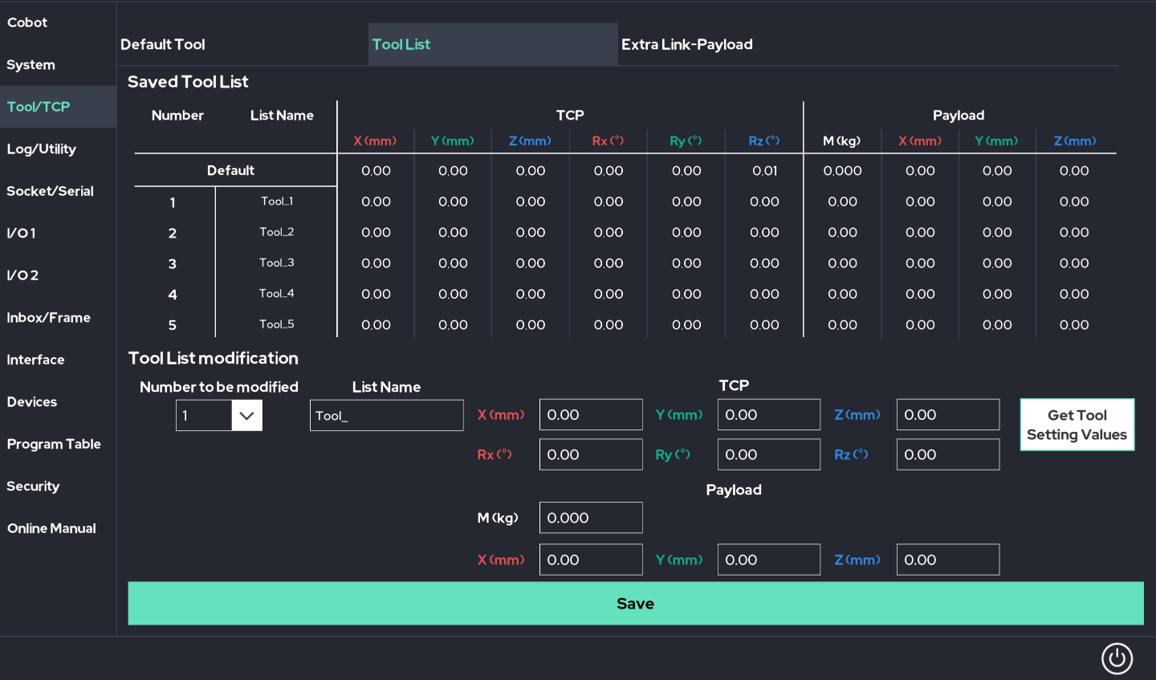
2. Tool List
Up to five tool configurations (TCP, CoG, and payload) can be saved.
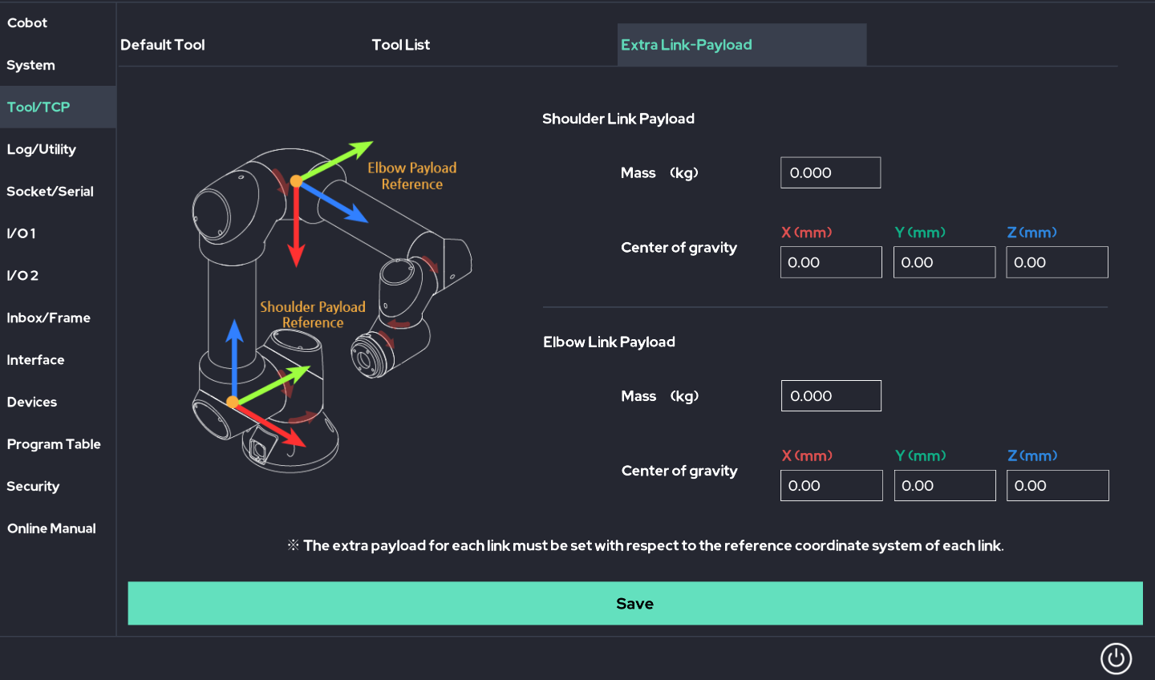
3. Extra Link-Payload
Additional equipment such as welding feeders can be mounted on the Shoulder and Elbow.