Set-up (Socket/Serial)
This is the section where you can configure the serial communication between the robot's tool and the control box.
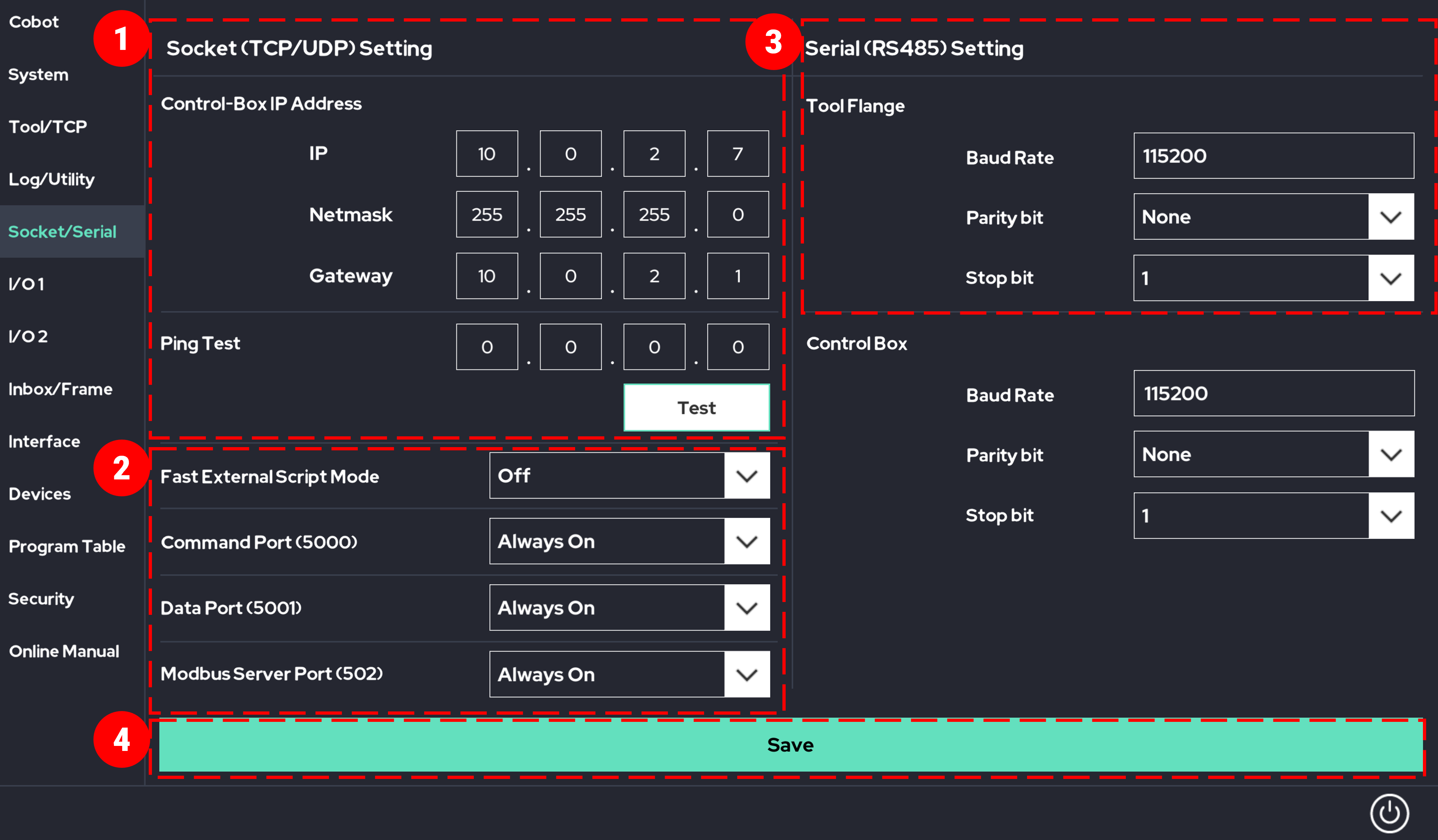
- You can assign a unique IP address to the control box.
The default IP address of the control box is set to 10.0.2.7.
When connecting the tablet PC wirelessly to the control box or using a LAN cable to connect a PC to the control box, ensure that the bandwidth of the IP address matches.
For the Ping test, enter the IP address of the device connected to the control box and press the test button to check the connection status. - High-speed External Script Mode : While the usual control cycle for external script control is 10ms, the high-speed external script mode supports 1.8ms.
- Command Port(5000) : This port is used when an external device sends commands to the control box during external script control (refer to Appendix E for more details).
- Data Port(5001) : This port is used when an external device receives data from the control box (refer to the Data Structure for more details).
- Modbus Server Port(502) : This port is used for Modbus communication.
- High-speed External Script Mode : While the usual control cycle for external script control is 10ms, the high-speed external script mode supports 1.8ms.
- Tool Flange : You can configure the communication speed, parity bit, and other settings for the RS485 on the tool flange side.
- Control Box : You can configure the communication speed, parity bit, and other settings for the RS485 on the control box side.
- Tool Flange : You can configure the communication speed, parity bit, and other settings for the RS485 on the tool flange side.
- Save the modified settings.