Set-up (Coordinate)
This section is for configuring a user-defined coordinate system (User-Coordinate).
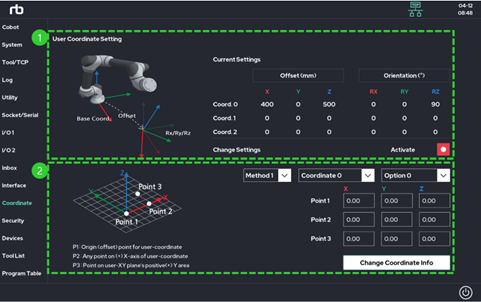
Displays the Current User-Defined Coordinate System Information. The information is displayed relative to the manufacturer’s robot base coordinate system.
Modify the Settings for User-Defined Coordinate Systems. You can set up to three user-defined coordinate systems.
Each coordinate is defined with the robot arm base as the origin.
Set the coordinate system through the 3-point setting.Point 1 (P1): This is the origin of the user-defined coordinate system.
Point 2 (P2): This is any point on the X-axis of the user-defined coordinate system. It is recommended to set P2 as far from P1 as possible.
Point 3 (P3): This is any point on the XY plane of the user-defined coordinate system. The direction of the Z-axis is determined based on the position of Point 3.