Set-up (Inbox)
This section is for configuring the size and position of the Inbox for its usage.
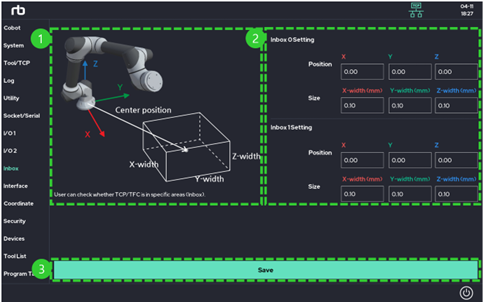
- Displays the Position Information of the Inbox. The position of the Inbox is set based on the robot arm base’s coordinate system as the origin.
- Set the Center Point and Width for Inbox 0 and Inbox 1. The orientation of the Inbox cannot be set.
The reference coordinate system for the settings is the manufacturer’s base coordinate system. - Save the Modified Settings.